


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (5): 1218-1225.DOI: 10.3969/j.issn.1004-132X.2026.05.022
曹轶然1( ), 高磊1, 吴孟丽1(), 王旭浩1, 彭聪1, 郭志永1, 梁瑶2
), 高磊1, 吴孟丽1(), 王旭浩1, 彭聪1, 郭志永1, 梁瑶2
收稿日期:2025-05-28
出版日期:2026-05-25
发布日期:2026-06-09
通讯作者:
吴孟丽
作者简介:曹轶然,女,1988年生,博士、讲师。研究方向为机器人运动控制和多智能体协同。E-mail:yrcao@cauc.edu.cn基金资助:
CAO Yiran1(), GAO Lei1, WU Mengli1(), WANG Xuhao1, PENG Cong1, GUO Zhiyong1, LIANG Yao2
Received:2025-05-28
Online:2026-05-25
Published:2026-06-09
Contact:
WU Mengli
摘要:
大型航空结构件的自动化运输中,基于图像的移动机器人跟踪变曲率轨迹存在图像可见性约束和转向角速度约束问题。提出了一种融合预瞄机制的预设性能视觉伺服控制策略,通过误差变换函数将归一化平面受限误差转换为无约束误差,并引入预设性能函数确保误差按预设性能收敛,保障图像中特征点的可见性。同时结合曲率驱动的自适应预瞄距离模型,构建“双区域”特征提取方案来提前修正状态反馈,有效抑制了角速度突变。通过MATLAB/Simulink仿真与实物实验对所提方法进行验证,结果表明,所提方法很好地将误差约束在预设曲线内,且融合预瞄机制后显著提高了移动机器人的跟踪精度与运动平稳性。
中图分类号:
曹轶然, 高磊, 吴孟丽, 王旭浩, 彭聪, 郭志永, 梁瑶. 融合预瞄机制的移动机器人预设性能视觉伺服控制策略[J]. 中国机械工程, 2026, 37(5): 1218-1225.
CAO Yiran, GAO Lei, WU Mengli, WANG Xuhao, PENG Cong, GUO Zhiyong, LIANG Yao. Prescribed Performance Visual Servo Control Strategy for Mobile Robots Integrating Preview Mechanism[J]. China Mechanical Engineering, 2026, 37(5): 1218-1225.
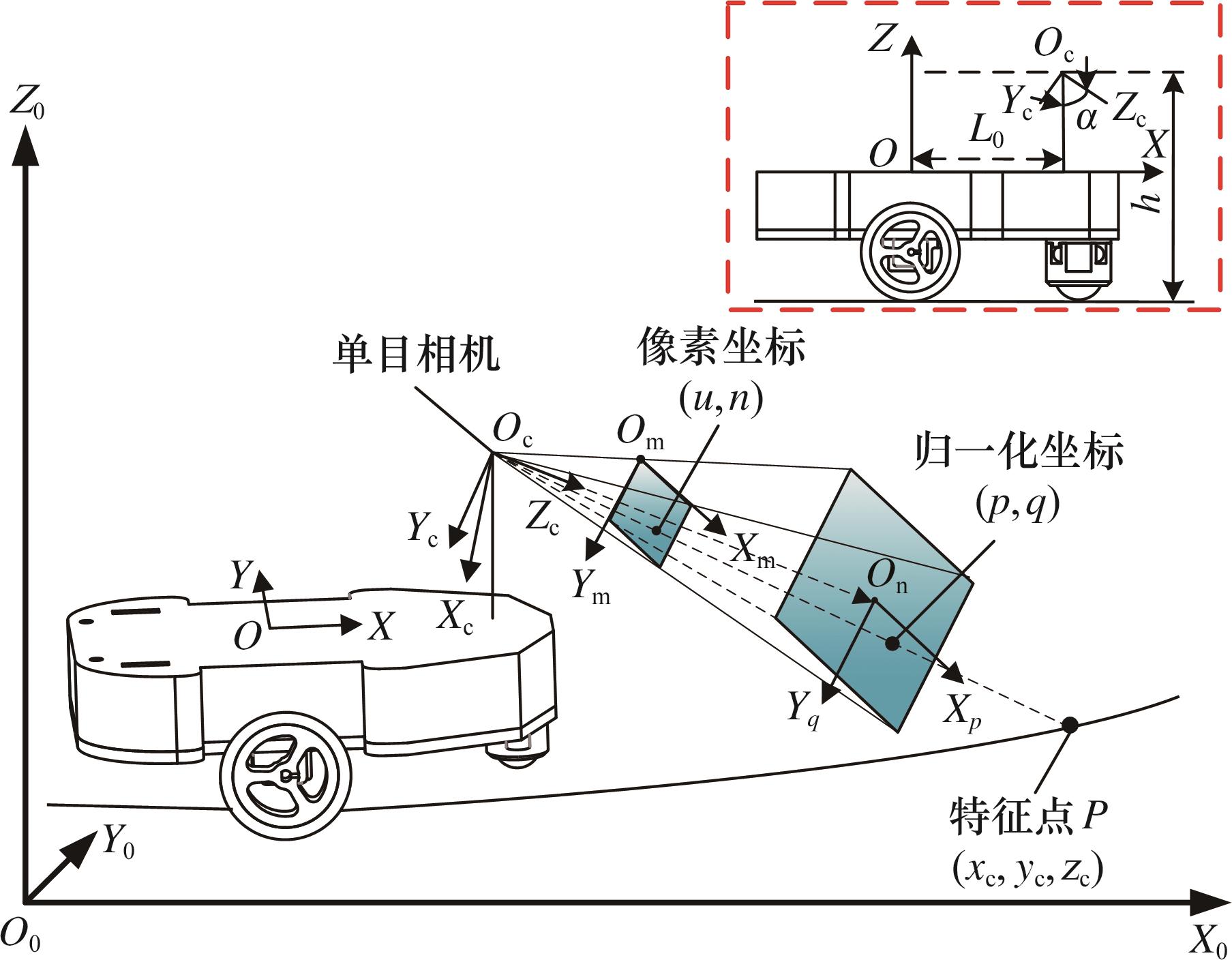
图1 视觉伺服控制系统
Fig.1 Visual servo control system
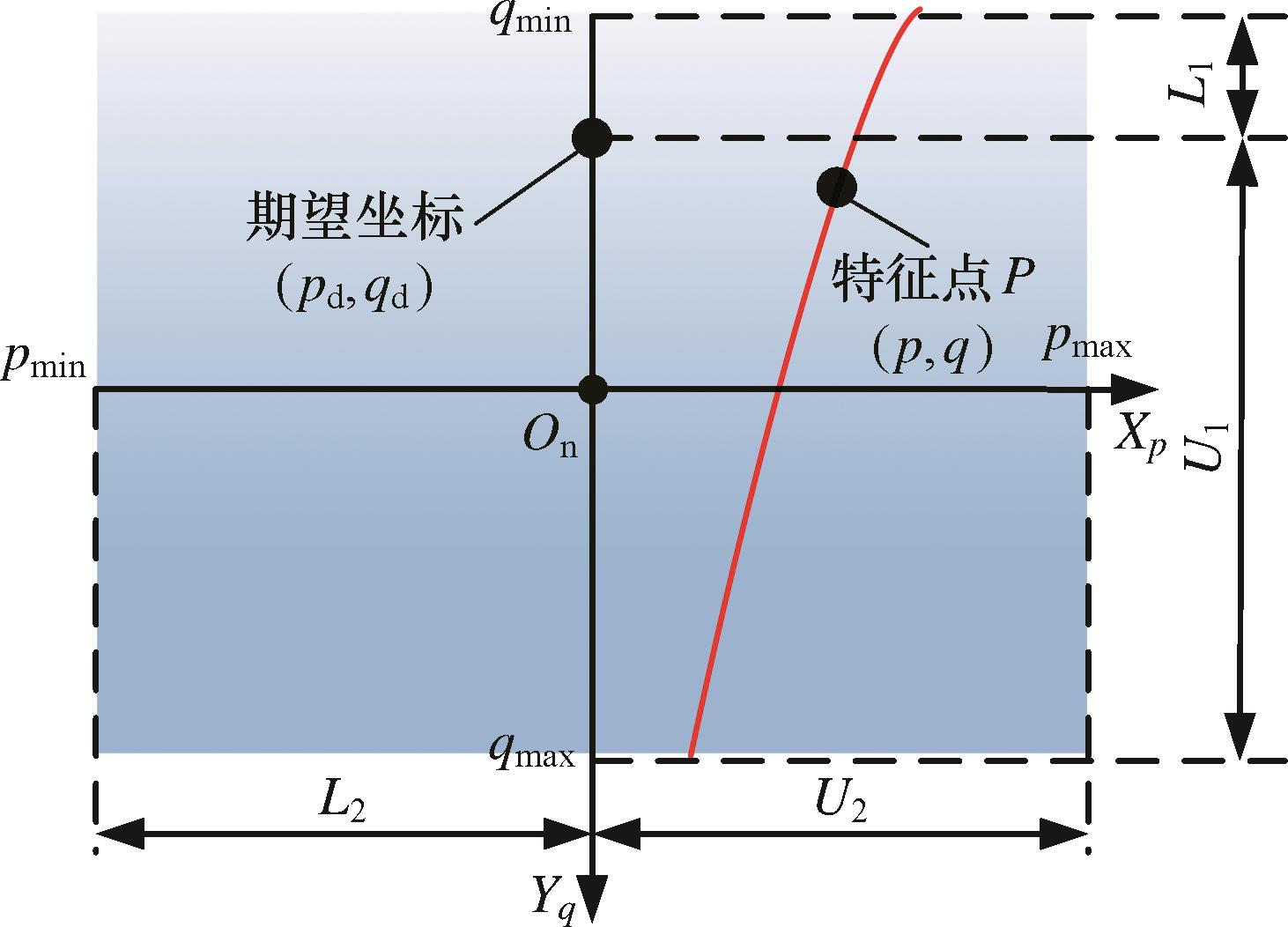
图2 归一化平面示意图
Fig.2 Normalized plane schematic diagram
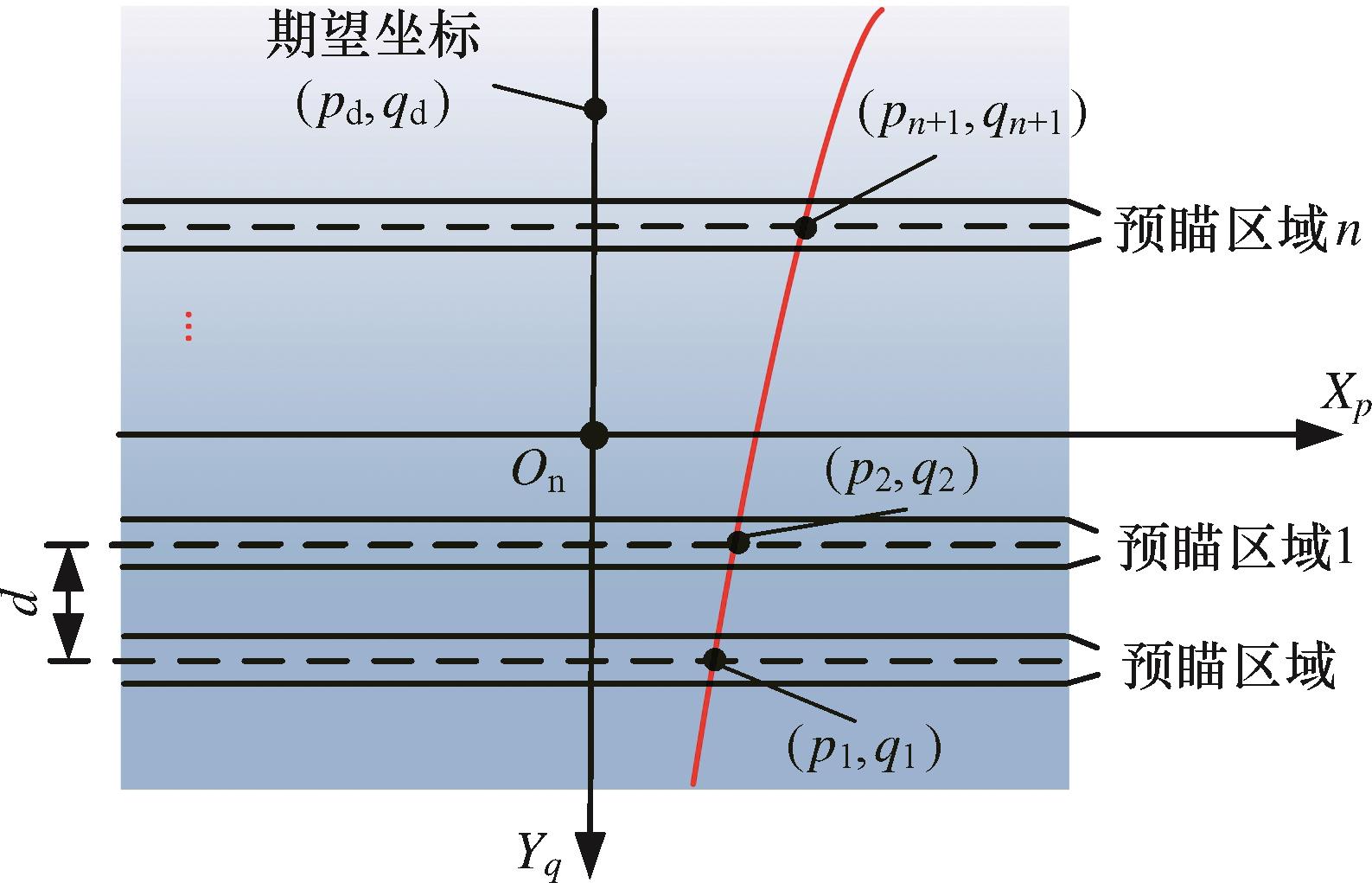
图3 归一化平面特征点提取示意图
Fig.3 Schematic diagram of normalized planar feature point extraction
| 参数 | 数值 |
|---|---|
| (pd,qd) | (0, |
| (p,q) | (0.2, |
| h/m | |
| K1 | diag(0.05,0.05) |
| K2 | diag(0.01,0.008) |
| 轨迹起始坐标/m | (0,5) |
| ( | (0.02,0.02) |
| 1 | |
| 移动机器人起始坐标/m | (-2.5,5.5) |
| (β1,β2) | (0.7,0.3) |
表1 仿真参数设计
Tab.1 Simulation parameter design
| 参数 | 数值 |
|---|---|
| (pd,qd) | (0, |
| (p,q) | (0.2, |
| h/m | |
| K1 | diag(0.05,0.05) |
| K2 | diag(0.01,0.008) |
| 轨迹起始坐标/m | (0,5) |
| ( | (0.02,0.02) |
| 1 | |
| 移动机器人起始坐标/m | (-2.5,5.5) |
| (β1,β2) | (0.7,0.3) |
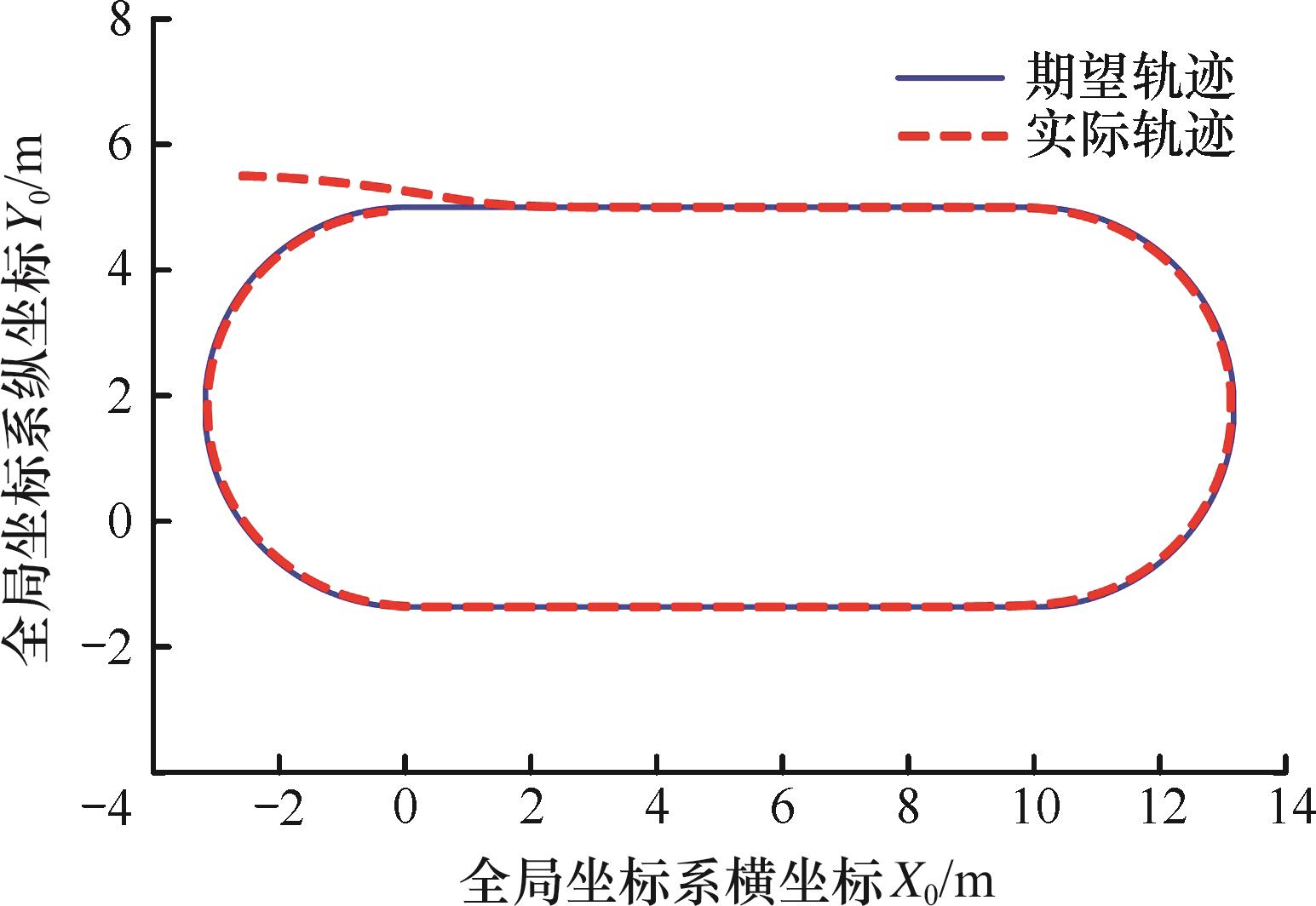
图4 移动机器人仿真运动轨迹
Fig.4 Simulation movement trajectory of the mobile robot
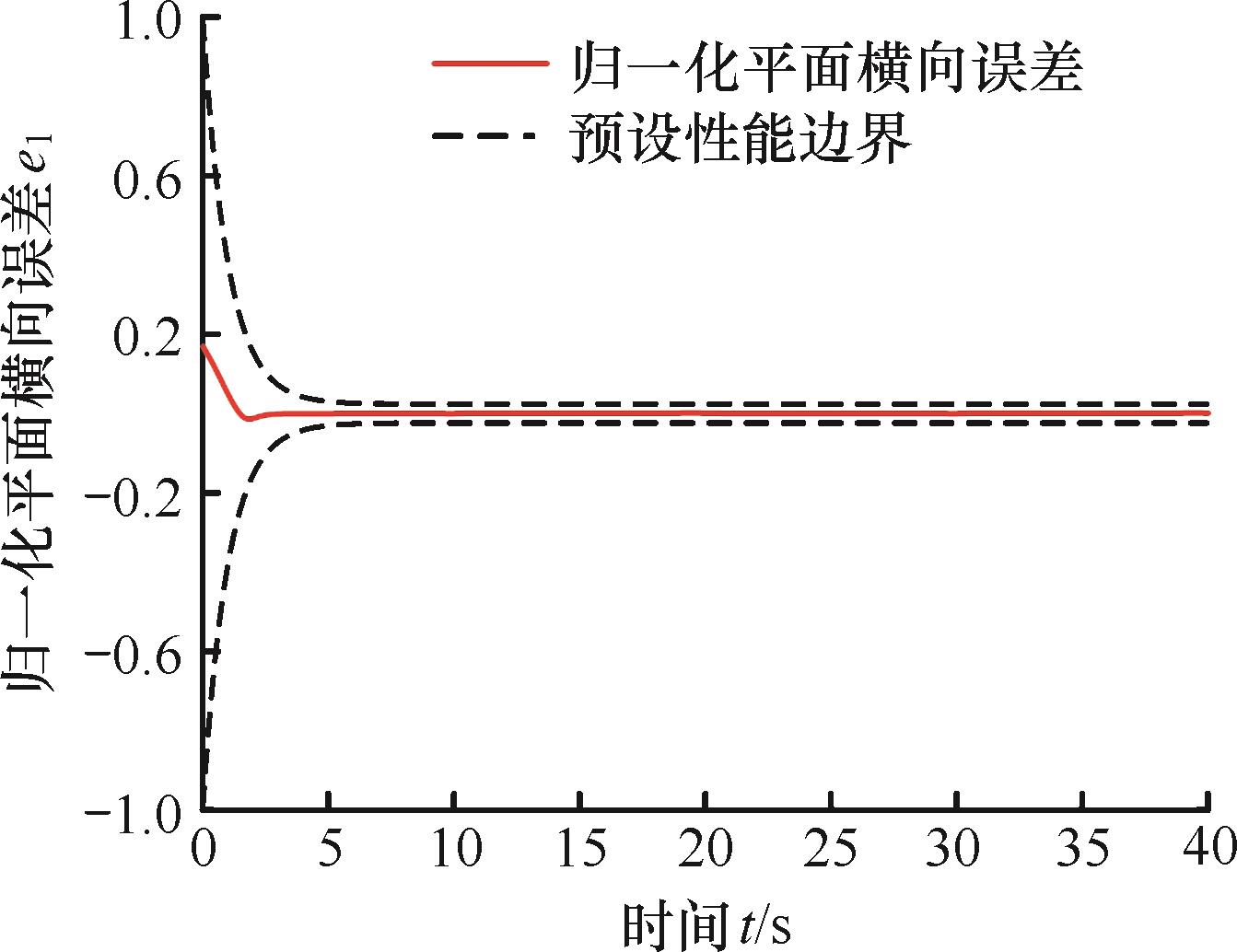
图5 归一化平面下横向误差的仿真结果
Fig.5 Simulation results of lateral error under the normalized plane
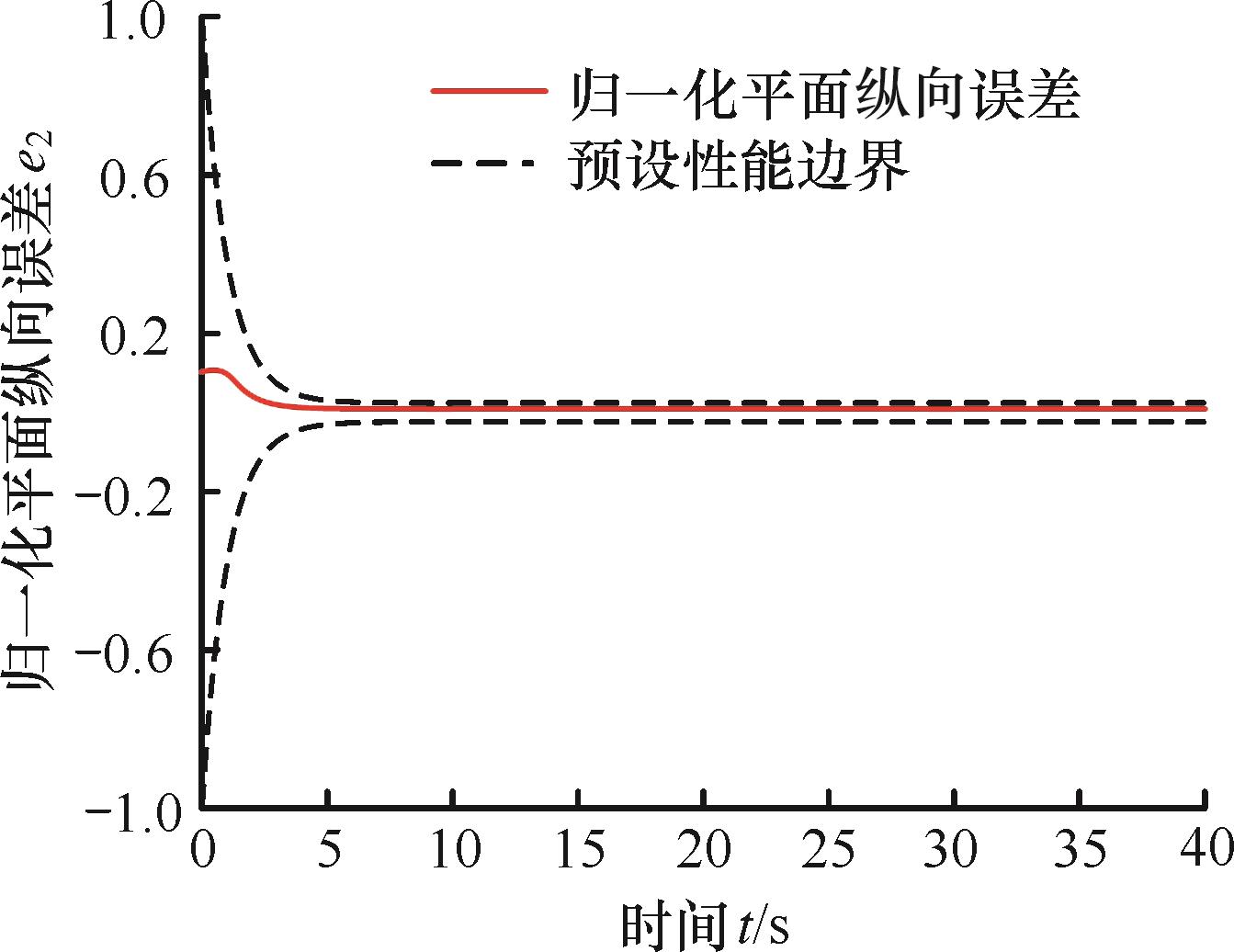
图6 归一化平面下纵向误差的仿真结果
Fig.6 Simulation results of longitudinal error under the normalized plane
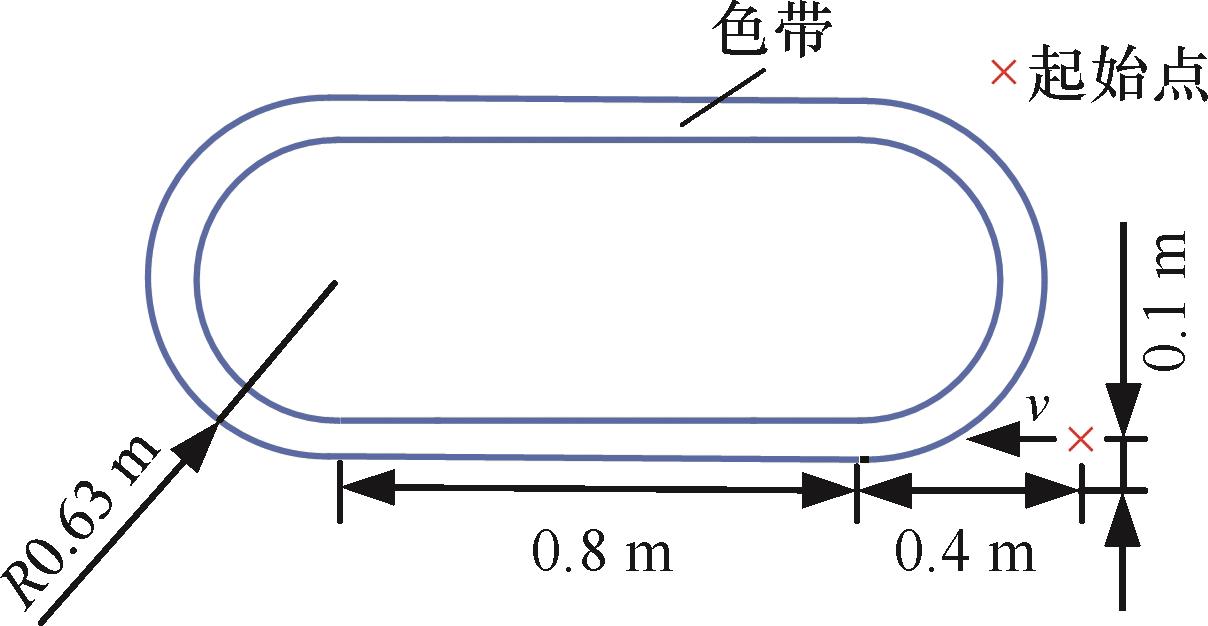
图7 实验轨迹布置图
Fig.7 Experimental trajectory layout diagram
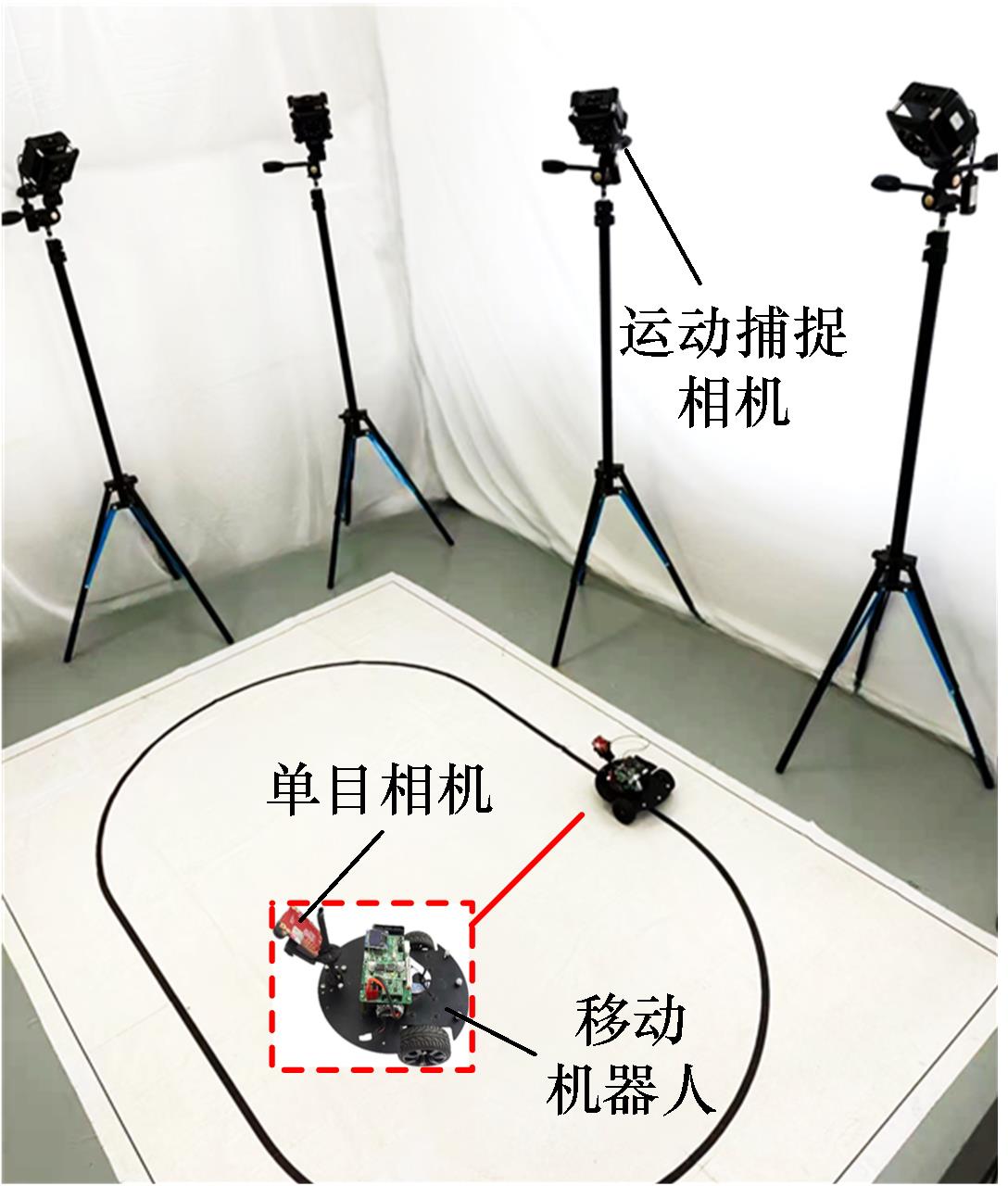
图8 实验场景布置图
Fig.8 Experimental scene layout diagram
图9 视觉图像预瞄跟踪特征点提取示意图
Fig.9 Schematic diagram of feature point extractionfor visual image preview tracking
图10 移动机器人实验运动轨迹
Fig.10 Experimental movement trajectory of the mobile robot
图11 归一化平面下横向误差的实验结果
Fig.11 Experimental results of lateral error under the normalized plane
图12 移动机器人角速度
Fig.12 Angular velocity of mobile robots
| [1] | 张哲源, 胡晓兵, 李虎, 等. 面向智能上下料系统的全局视觉AGV路径导航系统[J]. 组合机床与自动化加工技术, 2024(12): 91-95. |
| ZHANG Zheyuan, HU Xiaobing, LI Hu, et al. Global Vision AGV Path Navigation System for Intelligent Loading and Unloading Systems[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2024(12): 91-95. | |
| [2] | 王哲, 丰飞, 郭峰. 大尺度复杂构件群体机器人协同并行制造系统集成的关键技术[J]. 航空制造技术, 2025, 68(4): 53-66. |
| WANG Zhe, FENG Fei, GUO Feng. Key Technologies of Swarm Robotic Cooperative Parallel Manufacturing System Integration for Large Scale Complex Components[J]. Aeronautical Manufacturing Technology, 2025, 68(4): 3-66. | |
| [3] | 郑联语, 付强, 樊伟, 等. 基于双目视觉和先验加工数据的大型筒件原位位姿感知方法[J]. 机械工程学报, 2023, 59(11): 129-146. |
| ZHENG Lianyu, FU Qiang, FAN Wei, et al. In-situ Pose Measurement Method for Large Cylinders Based on Binocular Vision and Prior Processing Data[J]. Journal of Mechanical Engineering, 2023, 59(11): 129-146. | |
| [4] | 茅健, 廖茂成, 周海军, 等. 机器视觉技术在航空装配中的应用现状与展望[J]. 航空制造技术, 2025, 68(5): 26-46. |
| MAO Jian, LIAO Maocheng, ZHOU Haijun, et al. Machine Vision Technology in Aerospace Assembly: Current Status and Prospects[J]. Aeronautical Manufacturing Technology, 2025, 68(5): 26-46. | |
| [5] | 黄梦洁, 叶磊, 易凡骁, 等. 面向机器人控制的直接视觉伺服技术发展综述[J]. 控制理论与应用, 2025, 42(9): 1681-1699. |
| HUANG Mengjie, YE Lei, YI Fanxiao, et al. A Review of the Development of Direct Vision Servo Technology for Robot Control[J]. Control Theory & Applications, 2025, 42(9): 1681-1699. | |
| [6] | WANG T, ZHANG Y, LIU B. Model-based Visual Servoing for Automatic Docking System of Circular Symmetrical Target with Large Displacement[J]. International Journal of Control, Automation and Systems, 2023, 21( 4 ): 1273-1284. |
| [7] | JO K, CHWA D. Robust Hybrid Visual Servoing of Omnidirectional Mobile Manipulator with Kinematic Uncertainties Using a Single Camera[J]. IEEE Transactions on Cybernetics, 2024, 54(5): 2824-2837. |
| [8] | 仲训杲, 罗家国, 田军, 等. 二阶锥约束规划的机器人视觉闭环位姿自协调方法[J]. 中国机械工程, 2024, 35(6): 1064-1073. |
| ZHONG Xungao, LUO Jiaguo, TIAN Jun, et al. Robot Vision Closed-loop Pose Autonomous Coordination Method with Second-order Cone Constrained Programming[J]. China Mechanical Engineering, 2024, 35(6): 1064-1073. | |
| [9] | ZHU T, MAO J, HAN L, et al. Fuzzy Adaptive Model Predictive Control for Image-based Visual Servoing of Robot Manipulators with Kinematic Constraints[J]. International Journal of Control, Automation and Systems, 2024, 22(1): 311-322. |
| [10] | HE S, XU Y, GUAN Y, et al. Synthetic Robust Model Predictive Control with Input Mapping for Constrained Visual Servoing[J]. IEEE Transactions on Industrial Electronics, 2023, 70(9): 9270-9280. |
| [11] | WANG D, LIN J, MA L, et al. Image-based Visual-admittance Control with Prescribed Performance of Manipulators in Feature Space[J]. IEEE Transactions on Industrial Electronics, 2025, 72(5): 5060-5070. |
| [12] | DAI S, LIANG J, LU K, et al. Adaptive Image-based Moving-target Tracking Control of Wheeled Mobile Robots with Visibility Maintenance and Obstacle Avoidance[J]. IEEE Transactions on Control Systems Technology, 2024, 32(2): 488-501. |
| [13] | CHEN Y, LAN L, LIU X, et al. Adaptive Stiffness Visual Servoing for Unmanned Aerial Manipulators with Prescribed Performance[J]. IEEE Transactions on Industrial Electronics, 2024, 71(9): 11028-11038. |
| [14] | 刘铭, 冷搏, 闻焕汐, 等. 基于优化预瞄距离的无人驾驶车辆轨迹跟踪控制[J]. 同济大学学报(自然科学版), 2024, 52(): 165-175. |
| LIU Ming, LENG Bo, WEN Huanxi, et al. Trajectory Tracking Control of Autonomous Vehicle Based on Optimized Preview Distance[J]. Journal of Tongji University (Natural Science), 2024, 52(S1): 165-175. | |
| [15] | 张俊娜, 白国星. 基于速度调节与路径跟踪的差动机器人运动控制[J]. 工程科学学报, 2023, 45(9): 1550-1558. |
| ZHANG Junna, BAI Guoxing. Motion Control of Differential Robot Based on Speed Adjusting and Path Tracking[J]. Chinese Journal of Engineering, 2023, 45(9): 1550-1558. | |
| [16] | LI Q, CHEN Z, SONG H, et al. Model Predictive Control for Speed-dependent Active Suspension System with Road Preview Information[J]. Sensors, 2024, 24(7): 2255. |
| [17] | WANG Q, CHEN Q, LIU C, et al. A Model Predictive Control Algorithm for Path Tracking Based on Multi-point Preview Dynamics and Safety Guaranteed Constraint[J]. IEEE Transactions on Vehicular Technology, 2025, 74(1): 441-453. |
| [18] | 袁洋, 段海滨, 魏晨. 无人机/无人艇异构协同固定时间预设性能演化控制[J]. 自动化学报, 2025, 51(5): 1052-1066. |
| YUAN Yang, DUAN Haibin, WEI Chen. Heterogeneous Cooperative Fixed-time Prescribed Performance Evolution Control for Unmanned Aerial/Surface Vehicle[J]. Acta Automatica Sinica, 2025, 51(5): 1052-1066. | |
| [19] | 李小华, 刘莹, 邹嵩楠. 基于可变障碍函数和强化学习的预设性能最优安全跟踪控制[J]. 控制与决策, 2025, 40(3): 803-812. |
| LI Xiaohua, LIU Ying, ZOU Songnan. Optimal Safety Tracking Control with Prescribed Performance Based on Variable Barrier Function and Reinforcement Learning[J]. Control and Decision, 2025, 40(3): 803-812. | |
| [20] | KESHAVAN J, BELGAONKAR S, MURALI S. Adaptive Control of a Constrained First Order Sliding Mode for Visual Formation Convergence Applications[J]. IEEE Access, 2023, 11: 112263-112275. |
| [1] | 周志伟, 高健, 张揽宇. 对称并联运动机构的无模型交叉耦合控制[J]. 中国机械工程, 2025, 36(08): 1691-1699. |
| [2] | 何洋, 李刚, 余孝楠. 基于变论域的高速行驶智能汽车模糊模型预测控制方法研究[J]. 中国机械工程, 2025, 36(03): 604-613. |
| [3] | 孙凤1, 祝安杰1, 张明1, 裴文哲1, 金俊杰1, 张伟伟2, 唐钧跃2, 姜生元2. 月球弹簧回复式绳驱采样机械臂的设计及试验[J]. 中国机械工程, 2024, 35(11): 1977-1985. |
| [4] | 刘送永1, 吴洪状2, 程诚2, 宋明江1, 3, 崔玉明4. 煤矿掘进机自定位截割控制方法及试验研究[J]. 中国机械工程, 2024, 35(07): 1318-1329. |
| [5] | 仲训杲1, 4, 罗家国1, 田军2, 仲训昱2, 彭侠夫2, 刘强3. 二阶锥约束规划的机器人视觉闭环位姿自协调方法[J]. 中国机械工程, 2024, 35(06): 1064-1073. |
| [6] | 刘俊玲, 冯港辉, 张俊江, 杨凯. 无人驾驶混合动力汽车轨迹跟踪节能控制融合研究[J]. 中国机械工程, 2024, 35(04): 678-690. |
| [7] | 梅杰, 覃嘉锐, 陈定方, 陈昆, . 基于视觉同时定位与地图构建的水下图像增强式视觉三维重建方法[J]. 中国机械工程, 2024, 35(02): 268-279. |
| [8] | 许万, 程兆, 夏瑞东, 陈汉成. 一种基于动态残差的自适应鲁棒无迹卡尔曼滤波器定位算法[J]. 中国机械工程, 2023, 34(21): 2607-2614. |
| [9] | 武星, 杨俊杰, 汤凯, 翟晶晶, 楼佩煌. 面向复合地图的移动机器人分层路径规划[J]. 中国机械工程, 2023, 34(05): 563-575. |
| [10] | 李荣华, 杨景山, 郑宇锋, 周唯. 恒定轮距的多连杆式独立悬挂系统设计[J]. 中国机械工程, 2023, 34(02): 148-156. |
| [11] | 田明锐, 杨皓, 胡永彪. 大视场室内移动机器人高精度动态定位方法[J]. 中国机械工程, 2022, 33(02): 194-201. |
| [12] | 刘明源, 陈平, 马建设. 直驱式四足机器人的结构优化设计与研究[J]. 中国机械工程, 2021, 32(18): 2246-2253. |
| [13] | 谢冬福1;罗玉峰1,2;石志新1;刘燕德2. 多移动机器人协同模式及其倾翻稳定性研究[J]. 中国机械工程, 2020, 31(20): 2472-2485. |
| [14] | 李阳1,2,3;刘子明1,2,4;陈庆盈1,2,3 . 考虑打滑干扰的解耦式主动脚轮全向移动机器人跟踪控制[J]. 中国机械工程, 2020, 31(18): 2247-2253. |
| [15] | 邱少林;钱立军;陆建辉. 基于最优预瞄的智能车变道控制[J]. 中国机械工程, 2019, 30(23): 2778-2783. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||