


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (1): 73-82.DOI: 10.3969/j.issn.1004-132X.2026.01.009
孟德远( ), 张猛, 刘送永, 唐超权
), 张猛, 刘送永, 唐超权
收稿日期:2024-09-10
出版日期:2026-01-25
发布日期:2026-02-05
通讯作者:
孟德远
作者简介:孟德远*(通信作者),男,1982年生,副教授、硕士研究生导师。研究方向为气压传动系统精密控制、矿山装备智能化技术。发表论文40余篇。E-mail:tinydreams@126.com。
基金资助:
MENG Deyuan(), ZHANG Meng, LIU Songyong, TANG Chaoquan
Received:2024-09-10
Online:2026-01-25
Published:2026-02-05
Contact:
MENG Deyuan
摘要:
针对气动肌肉输出力特性复杂、六自由度并联平台具有较大参数不确定性和模型不确定性等控制难点,采用反步法设计了基于关节空间的交叉耦合自适应鲁棒控制器,以增强关节协同运动的控制能力。该控制器为两层级联结构,每层包含一个在线参数估计模块和一个基于非线性模型的鲁棒控制模块。在线参数估计模块通过在线最小二乘参数估计减小模型参数的不确定性,鲁棒控制模块利用鲁棒控制策略减小参数估计误差、非线性建模误差和外界干扰造成的影响。实验结果表明,所设计的控制器能提高并联平台位姿控制精度。平台做升降运动、三自由度复合平移运动和六自由度位姿混合运动时,位置的平均跟踪误差不超过0.84 mm,姿态的平均跟踪误差不超过0.03°,且对干扰具有较强的性能鲁棒性。
中图分类号:
孟德远, 张猛, 刘送永, 唐超权. 气动肌肉驱动六自由度并联平台的高精度位姿控制[J]. 中国机械工程, 2026, 37(1): 73-82.
MENG Deyuan, ZHANG Meng, LIU Songyong, TANG Chaoquan. High Precision Position and Posture Control of 6-DOF Parallel Platforms Driven by Pneumatic Muscles[J]. China Mechanical Engineering, 2026, 37(1): 73-82.
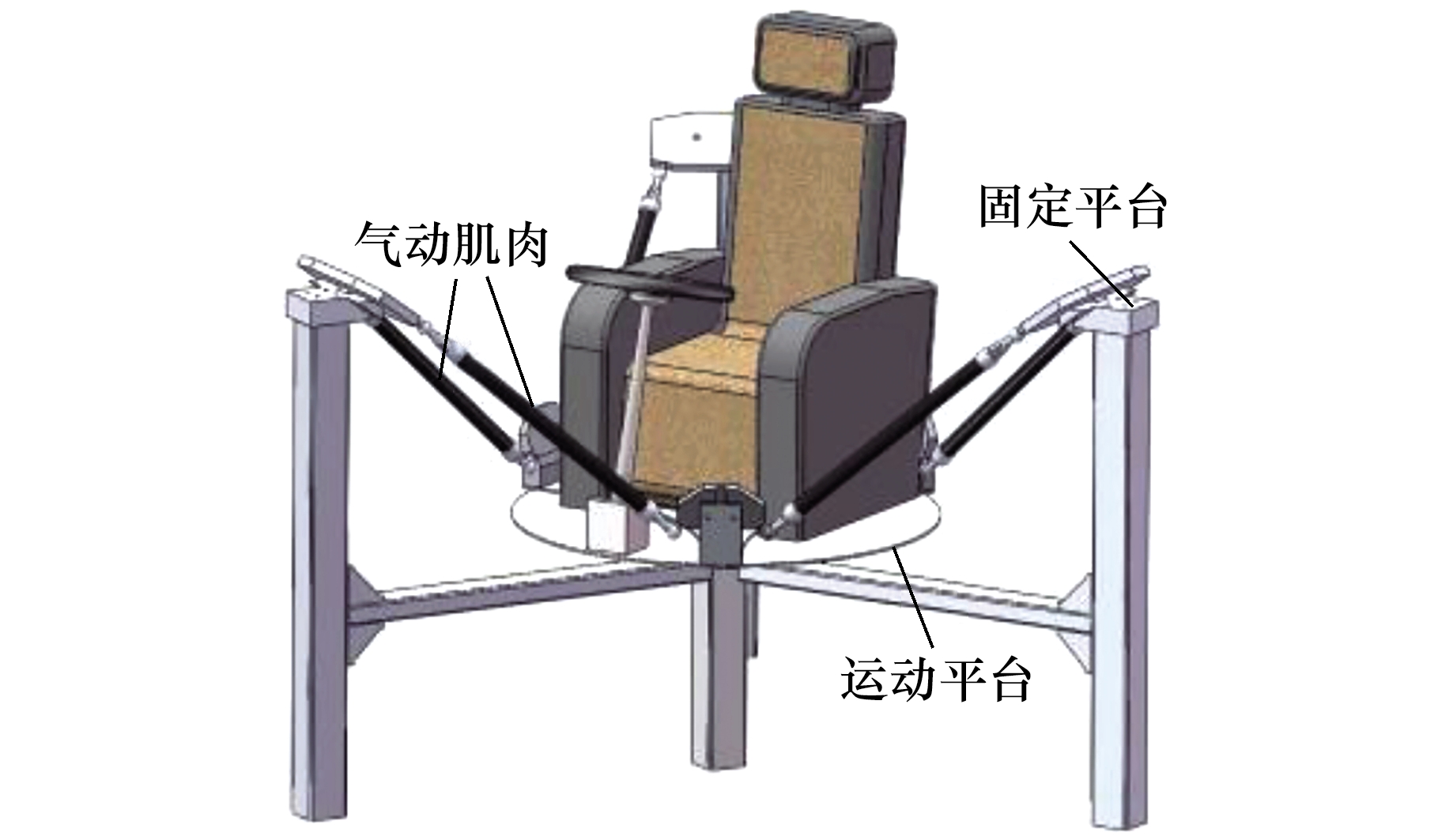
图1 气动肌肉驱动的六自由度并联平台
Fig.1 The 6-DOF parallel platform driven by pneumatic muscles
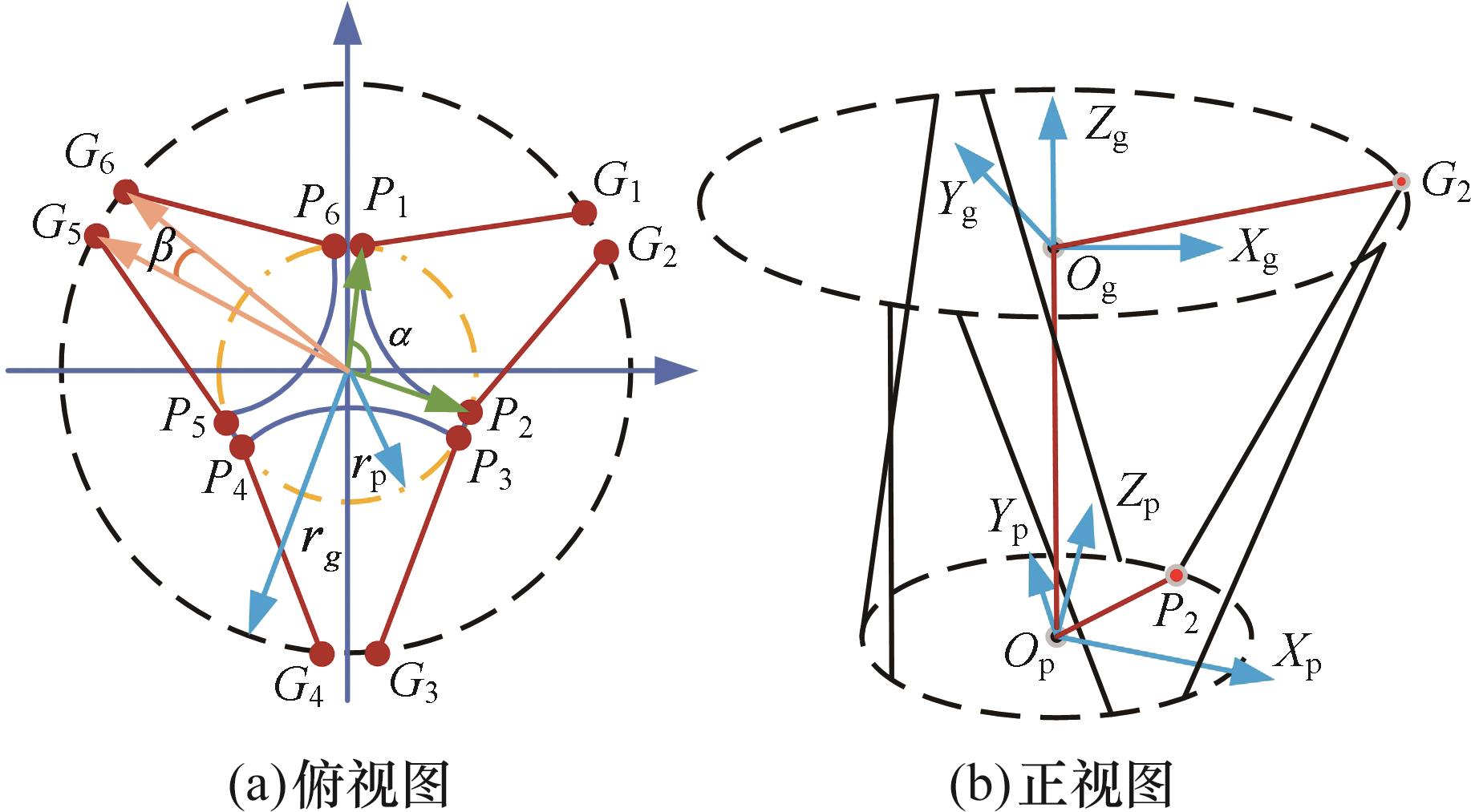
图2 气动肌肉驱动的六自由度并联平台结构参数
Fig.2 Structure parameters of the 6-DOF parallel platform driven by pneumatic muscles
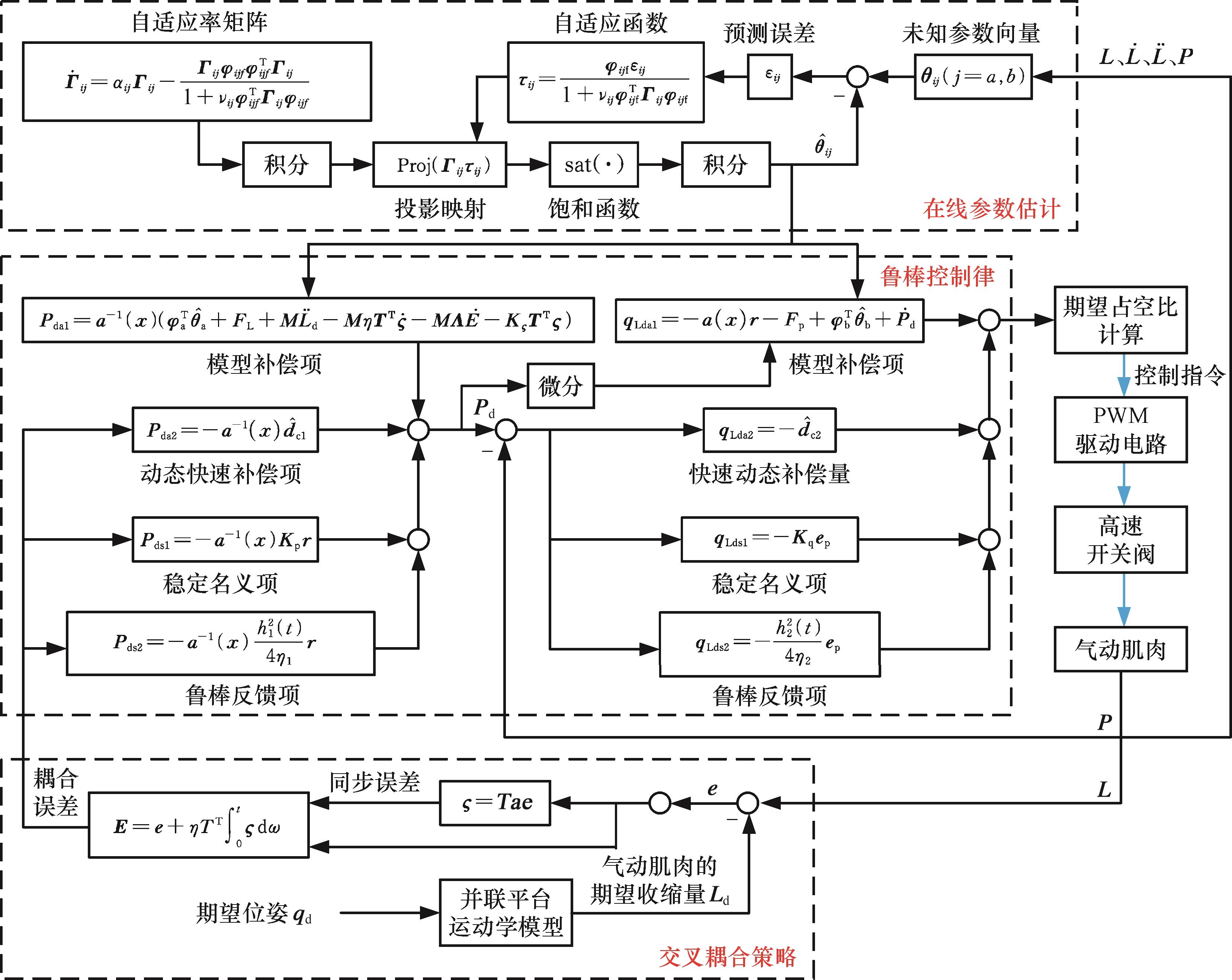
图3 气动肌肉驱动六自由度并联平台的交叉耦合自适应鲁棒控制算法
Fig.3 Framework of cross-coupling adaptive robust control algorithm
| 参数 | 数值 |
|---|---|
| 0.3 | |
| diag(200,200,200,200,200,200) | |
| diag(45,45,45,45,45,45) | |
| diag(520,520,520,520,520,520) | |
| h1, | 5,5 |
| diag(120,120,120,120,120,120) | |
| h2, | 0.5,1 |
| θiamax | (0,0,200,0,200) |
| θiamin | ( |
| θibmax,θibmin | 500000, |
| diag(10,10,10,10,10) | |
| 1000 | |
| 0.1,0.1 | |
| 0.1,0.1 | |
| (10,10,10,10,10)T,1000 | |
| 500,500000 | |
| 50,100,1 | |
| diag(10,10,10,10,10,10) | |
| diag(1200,1200,1200,1200,1200,1200) | |
| 500,600000 |
表1 控制器C1参数
Tab.1 Parameters of the proposed controller C1
| 参数 | 数值 |
|---|---|
| 0.3 | |
| diag(200,200,200,200,200,200) | |
| diag(45,45,45,45,45,45) | |
| diag(520,520,520,520,520,520) | |
| h1, | 5,5 |
| diag(120,120,120,120,120,120) | |
| h2, | 0.5,1 |
| θiamax | (0,0,200,0,200) |
| θiamin | ( |
| θibmax,θibmin | 500000, |
| diag(10,10,10,10,10) | |
| 1000 | |
| 0.1,0.1 | |
| 0.1,0.1 | |
| (10,10,10,10,10)T,1000 | |
| 500,500000 | |
| 50,100,1 | |
| diag(10,10,10,10,10,10) | |
| diag(1200,1200,1200,1200,1200,1200) | |
| 500,600000 |
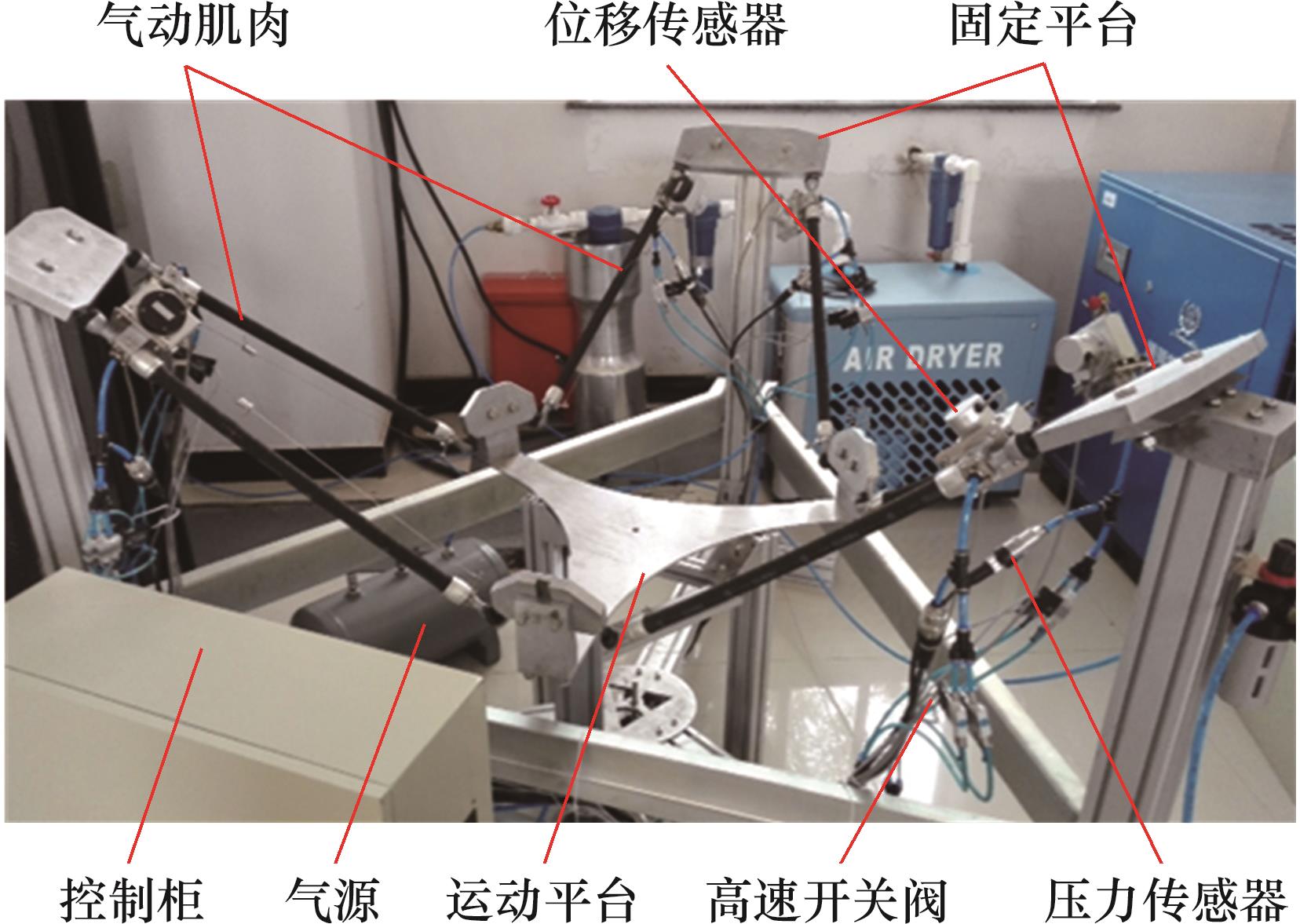
图4 实验台照片
Fig.4 Picture of the experimental setup
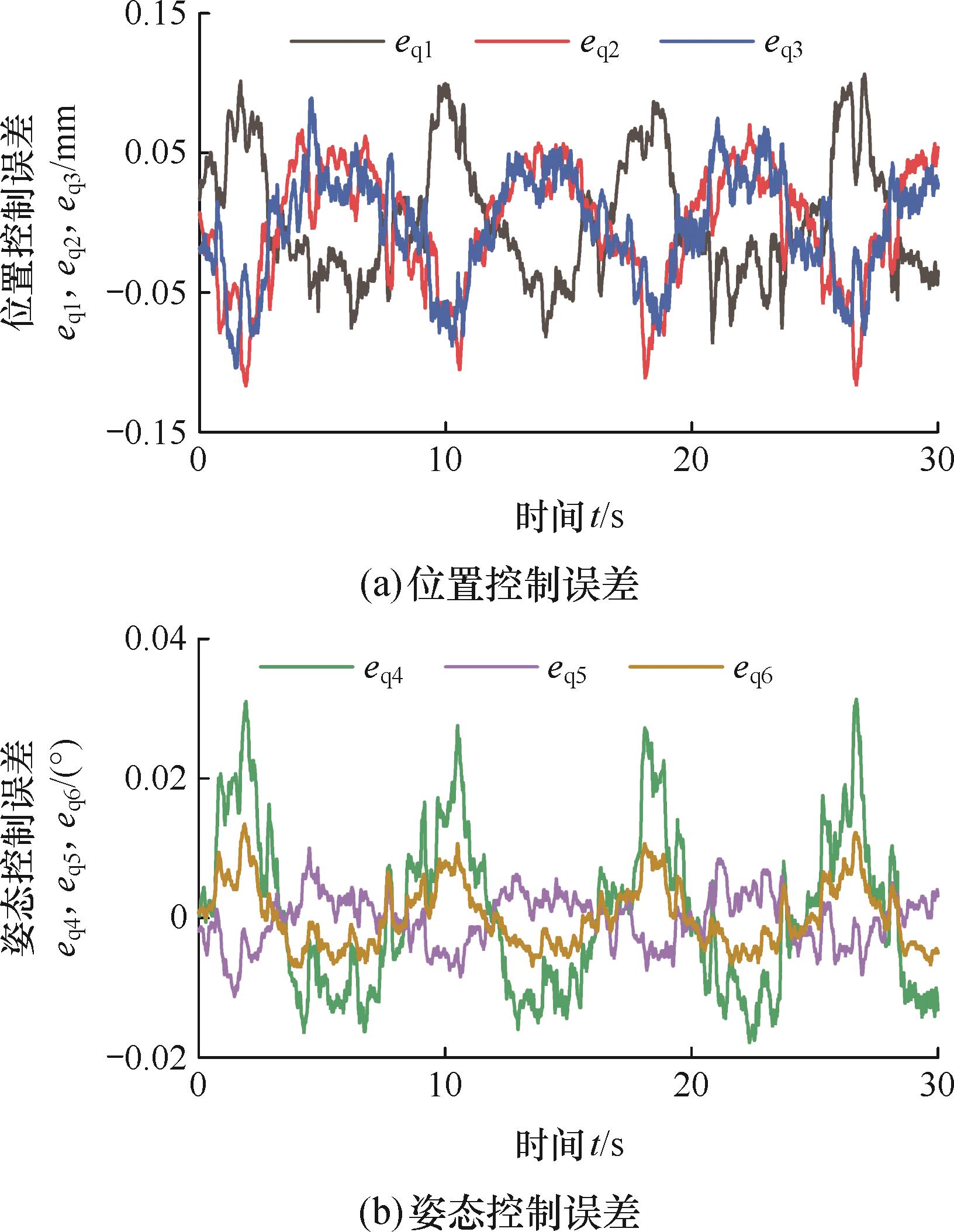
图5 平台初始位姿控制误差
Fig.5 Initial orientation and position control errors of the parallel platform
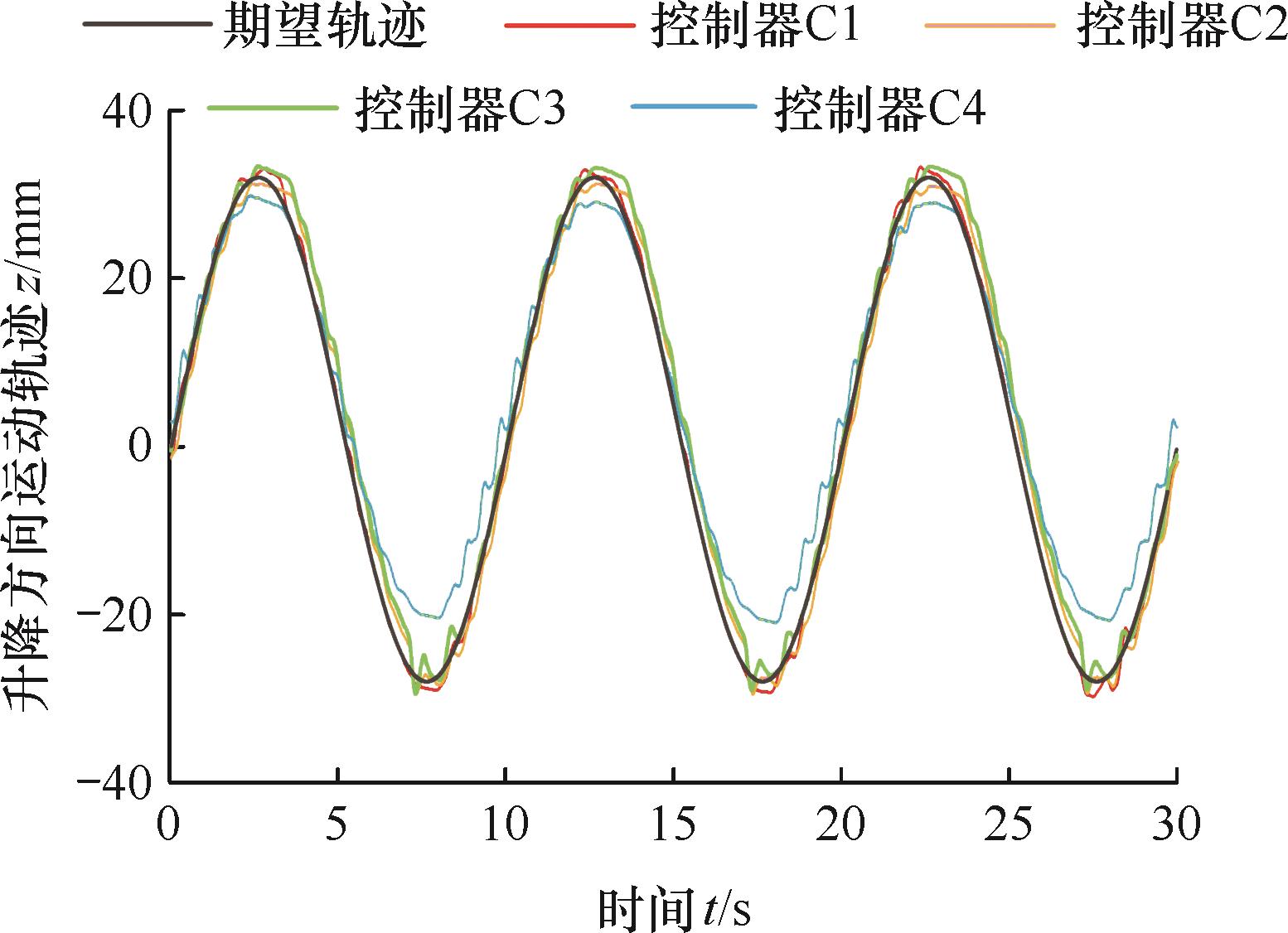
图6 升降运动时四个控制器的稳态跟踪响应
Fig.6 Z-axis position tracking errors with four controllers
| 控制器 | ||
|---|---|---|
| C4 | 9.29 | 4.24 |
| C3 | 6.65 | 2.99 |
| C2 | 4.67 | 2.35 |
| C1 | 2.12 | 0.84 |
表2 四个控制器性能对比
Tab.2 Tracking performance indexes mm
| 控制器 | ||
|---|---|---|
| C4 | 9.29 | 4.24 |
| C3 | 6.65 | 2.99 |
| C2 | 4.67 | 2.35 |
| C1 | 2.12 | 0.84 |
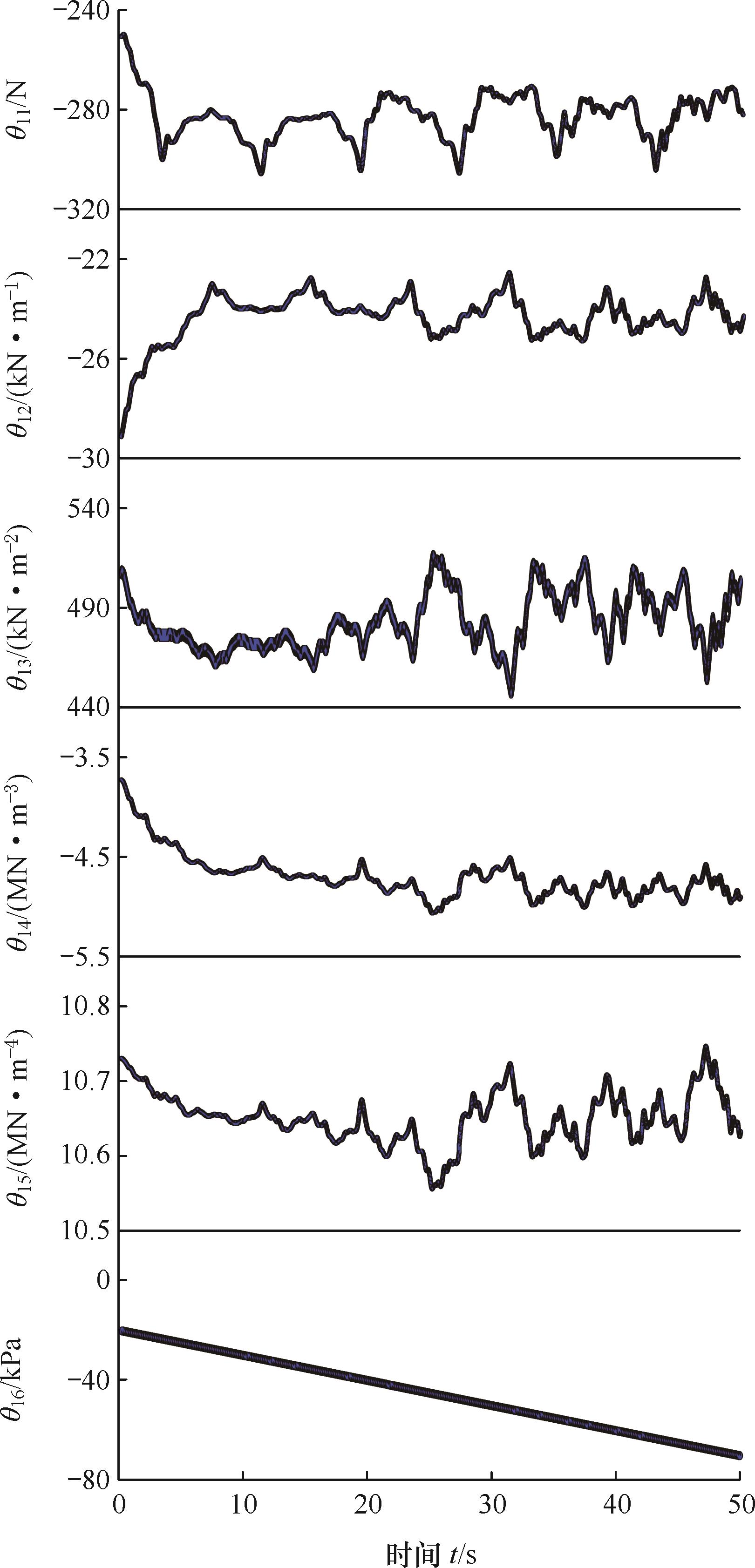
图7 控制器C1的在线参数估计过程
Fig.7 Parameter estimates of controller C1
| 期望轨迹 | |||
|---|---|---|---|
| 升降 | xd=t | 1.58 | 0.46 |
| 横移 | yd=24sin(0.1πt | 1.42 | 0.52 |
| 纵移 | zd=30sin(0.1πt | 1.755 | 0.53 |
表3 三自由度复合平动时C1的轨迹跟踪误差
Tab.3 Tracking performance indexes of C1 for spatial translational motion mm
| 期望轨迹 | |||
|---|---|---|---|
| 升降 | xd=t | 1.58 | 0.46 |
| 横移 | yd=24sin(0.1πt | 1.42 | 0.52 |
| 纵移 | zd=30sin(0.1πt | 1.755 | 0.53 |
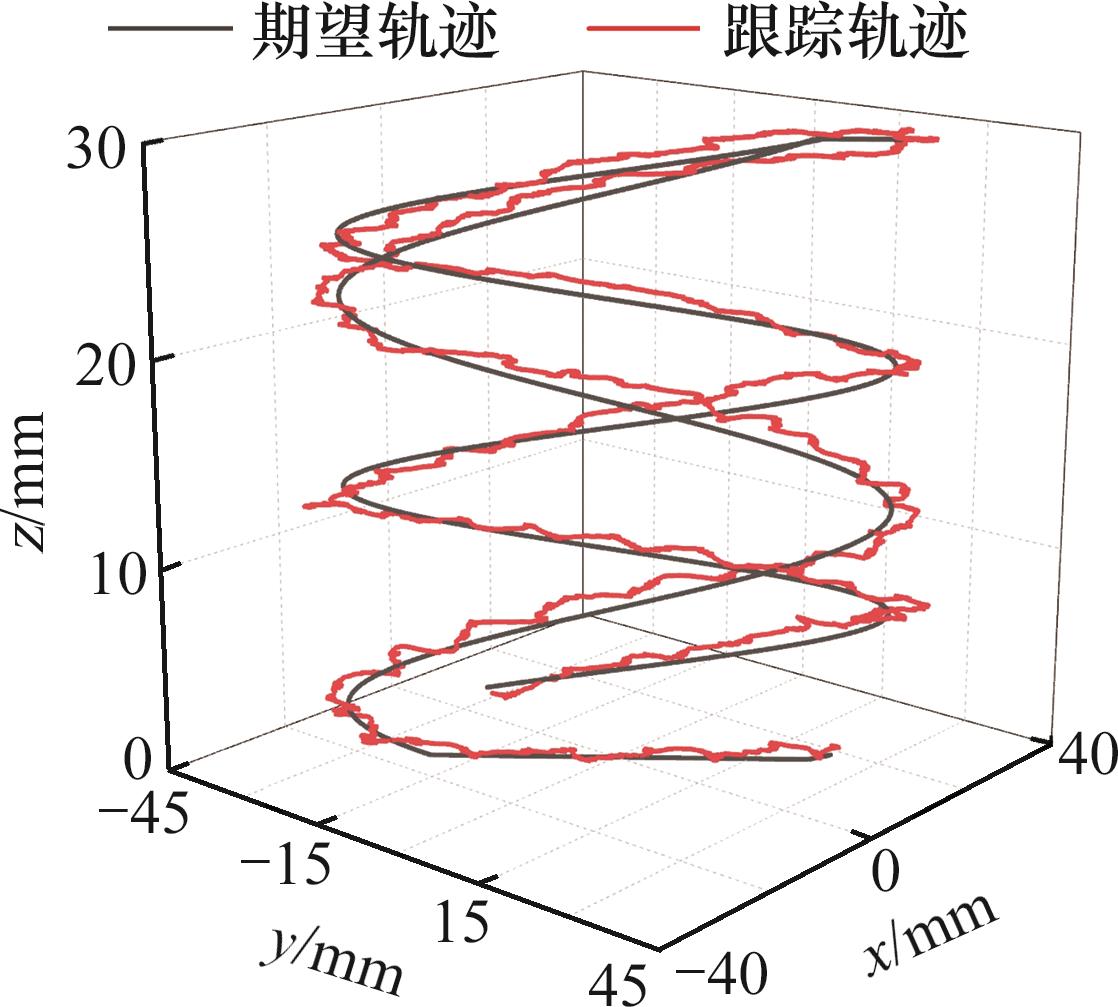
图8 三自由度复合平动时控制器C1的轨迹跟踪响应
Fig.8 Tracking response of controller C1 for spatial translational motion
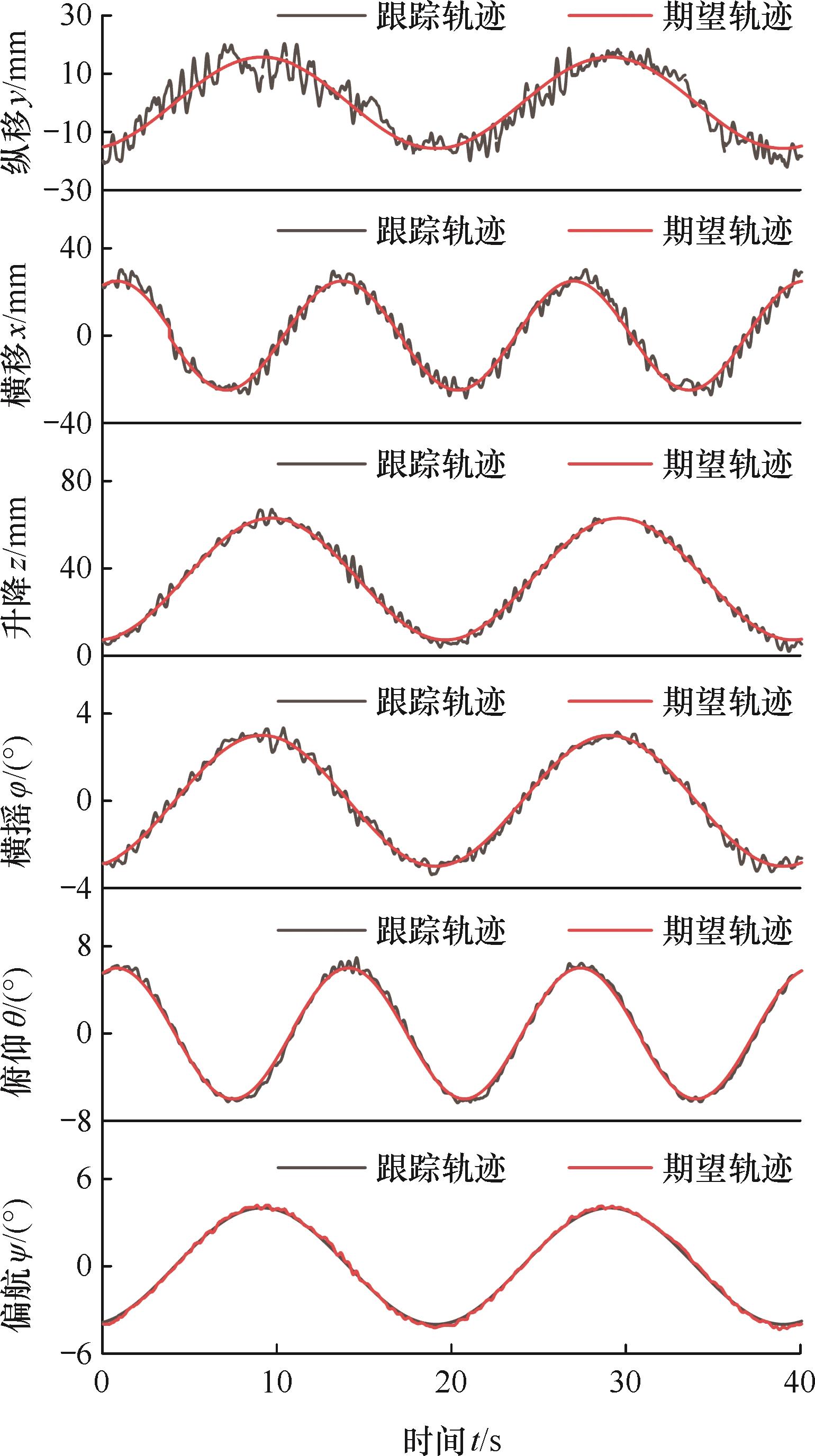
图9 六自由度复合运动时C1的轨迹跟踪响应
Fig.9 Orientation and position tracking errors of C1 for spatial translation and rotation
| 期望轨迹 | |||
|---|---|---|---|
| 升降/mm | xd=28sin(0.1πt)+10 | 2.36 | 0.33 |
| 横移/mm | yd=20sin(0.15πt) | 3.20 | 0.42 |
| 纵移/mm | zd=16sin(0.1πt) | 1.46 | 0.37 |
| 偏航/(°) | 0.195 | 0.005 | |
| 俯仰/(°) | 0.551 | 0.028 | |
| 横摇/(°) | 0.405 | 0.014 |
表4 六自由度复合运动时C1的轨迹跟踪误差
Tab.4 Tracking performance indexes of C1 for spatial motion
| 期望轨迹 | |||
|---|---|---|---|
| 升降/mm | xd=28sin(0.1πt)+10 | 2.36 | 0.33 |
| 横移/mm | yd=20sin(0.15πt) | 3.20 | 0.42 |
| 纵移/mm | zd=16sin(0.1πt) | 1.46 | 0.37 |
| 偏航/(°) | 0.195 | 0.005 | |
| 俯仰/(°) | 0.551 | 0.028 | |
| 横摇/(°) | 0.405 | 0.014 |
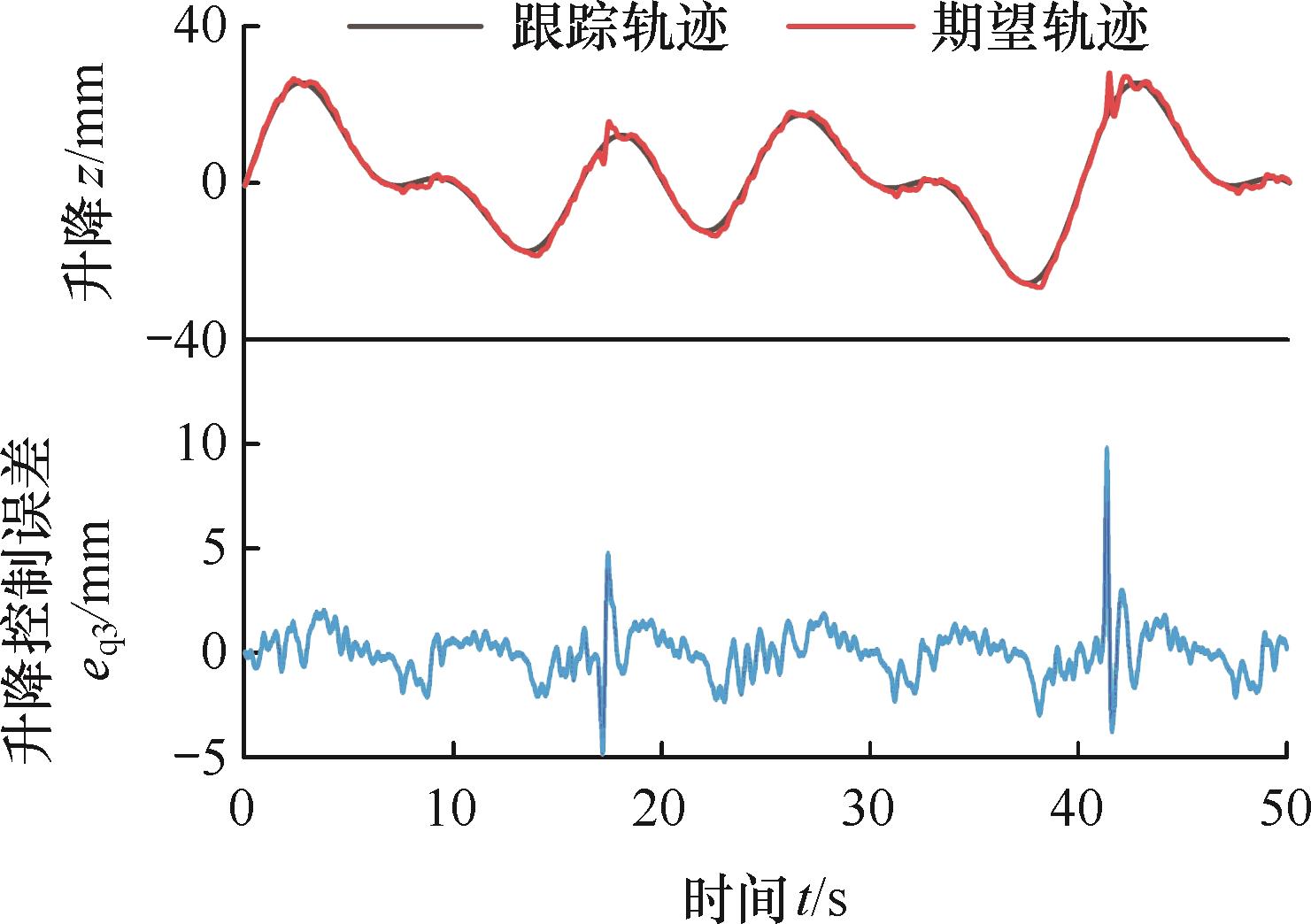
图10 有干扰情况下C1的升降运动轨迹跟踪控制结果
Fig.10 Z-axis position tracking error of C1 for sinusoidal trajectory motion with disturbance
| [1] | ZHANG Jun, SHENG Jun, O’NEILL C T, et al. Robotic Artificial Muscles: Current Progress and Future Perspectives[J]. IEEE Transactions on Robotics, 2019, 35(3): 761-781. |
| [2] | ANDRIKOPOULOS G, NIKOLAKOPOULOS G, MANESIS S. A Survey on Applications of Pneumatic Artificial Muscles[C]∥2011 19th Mediterranean Conference on Control & Automation (MED). Corfu island, 2011: 1439-1446. |
| [3] | KALITA B, LEONESSA A, DWIVEDY S K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application[J]. Actuators, 2022, 11(10): 288. |
| [4] | 杨钢, 李宝仁. 基于CMAC的气动人工肌肉变结构位置控制研究[J]. 机械工程学报, 2004, 40(10): 92-96. |
| YANG Gang, LI Baoren. CMAC-based Variable Structure Position Control of a Pneumatic Muscle Actuator System[J]. Chinese Journal of Mechanical Engineering, 2004, 40(10): 92-96. | |
| [5] | 朱笑丛, 陶国良, 曹剑. 气动肌肉并联关节的位姿轨迹跟踪控制[J]. 机械工程学报, 2008, 44(7): 161-167. |
| ZHU Xiaocong, TAO Guoliang, CAO Jian. Posture Trajectory Tracking Control of Parallel Manipulator Driven by Pneumatic Muscles[J]. Chinese Journal of Mechanical Engineering, 2008, 44(7): 161-167. | |
| [6] | 朱笑丛, 陶国良. 气动人工肌肉伺服平台的建模[J]. 浙江大学学报(工学版), 2004, 38(8): 1056-1060. |
| ZHU Xiaocong, TAO Guoliang. Modeling of a Servo Platform Driven by Pneumatic Artificial Muscles[J]. Journal of Zhejiang University (Engineering Science), 2004, 38(8): 1056-1060. | |
| [7] | ZHU Xiaocong, TAO Guoliang, YAO Bin, et al. Adaptive Robust Posture Control of a Parallel Manipulator Driven by Pneumatic Muscles[J]. Automatica, 2008, 44(9): 2248-2257. |
| [8] | ZUO He, TAO Guoliang. Cross-coupling Integral Adaptive Robust Posture Control of a Pneumatic Parallel Platform[J]. Journal of Central South University, 2016, 23(8): 2036-2047. |
| [9] | 刘昱, 王涛, 范伟. 基于气动肌肉群驱动球关节机器人结构及阻抗控制[J]. 机械工程学报, 2013, 49(15): 28-33. |
| LIU Yu, WANG Tao, FAN Wei. Mechanism and Impedance Control of the Ball Universal Joint Robot Driven by the Pneumatic Muscle Actuator Group[J]. Journal of Mechanical Engineering, 2013, 49(15): 28-33. | |
| [10] | KHOA L D, TRUONG D Q, AHN K K. Synchronization Controller for a 3-R Planar Parallel Pneumatic Artificial Muscle (PAM) Robot Using Modified ANFIS Algorithm[J]. Mechatronics, 2013, 23(4): 462-479. |
| [11] | 周爱国, 施光林, 钟廷修, 等. 气动人工肌肉并联驱动多自由度平台的系统设计[J]. 液压与气动, 2004, 28(5): 41-43. |
| ZHOU Aiguo, SHI Guanglin, ZHONG Tingxiu, et al. System Design of Multi-DOF Platform Driven by Pneumatic Artificial Muscle[J]. Chinese Hydraulics & Pneumatics, 2004, 28(5): 41-43. | |
| [12] | 施光林, 沈伟. 气动人工肌肉并联平台自适应模糊CMAC姿态跟踪控制[J]. 中国机械工程, 2012, 23(2): 171-176. |
| SHI Guanglin, SHEN Wei. Adaptive Fuzzy CMAC Position Tracking Control of Parallel Platform Based on Pneumatic Artificial Muscles[J]. China Mechanical Engineering, 2012, 23(2): 171-176. | |
| [13] | RAMSAUER M, KASTNER M, FERRARA P, et al. A Pneumatically Driven Stewart Platform Used as Fault Detection Device[J]. Applied Mechanics and Materials, 2012, 186: 227-233. |
| [14] | 孟德远, 魏伟, 李艾民, 等. 一种基于气动肌肉的六自由度并联伺服平台: CN105139895A[P]. 2015-12-09. |
| Meng Deyuan, Wei Wei, Li Aimin, et al. Six-degree-of-freedom Parallel Servo Platform Based on Pneumatic Muscles: CN105139895A[P]. 2015-12-09. | |
| [15] | 吴尧兴. 基于气动人工肌肉的低成本车辆驾驶模拟器开发[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| Wu Yaoxing. Development of Low-cost Vehicle Driving Simulator Based on Pneumatic Artificial Muscles[D]. Harbin: Harbin Insitute of Technology, 2020. | |
| [16] | 张凯临, 张文静, 秦胜光. 海上漂浮式激光雷达运动平台模拟器设计及应用[J]. 中国海洋大学学报(自然科学版), 2022, 52(12): 134-141. |
| ZHANG Kailin, ZHANG Wenjing, QIN Shengguang. Design and Application of Offshore Floating Lidar Motion Platform Simulator[J]. Periodical of Ocean University of China, 2022, 52(12): 134-141. | |
| [17] | DASGUPTA B, MRUTHYUNJAYA T S. Closed-form Dynamic Equations of the General Stewart Platform through the Newton-Euler Approach[J]. Mechanism and Machine Theory, 1998, 33(7): 993-1012. |
| [18] | ASCHEMANN H, SCHINDELE D. Sliding-mode Control of a High-speed Linear Axis Driven by Pneumatic Muscle Actuators[J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 3855-3864. |
| [19] | WU Jun, HUANG Jian, WANG Yongji, et al. Nonlinear Disturbance Observer-based Dynamic Surface Control for Trajectory Tracking of Pneumatic Muscle System[J]. IEEE Transactions on Control Systems Technology, 2014, 22(2): 440-455. |
| [20] | YAO Bin, TOMIZUKA M. Adaptive Robust Control of SISO Nonlinear Systems in a Semi-strict Feedback Form[J]. Automatica, 1997, 33(5): 893-900. |
| [21] | MENG Deyuan, TAO Guoliang, ZHU Xiaocong. Integrated Direct/Indirect Adaptive Robust Motion Trajectory Tracking Control of Pneumatic Cylinders[J]. International Journal of Control, 2013, 86(9): 1620-1633. |
| [1] | 李小力, 陈威, 闫蓉. 基于BP神经网络的空间轮廓误差自适应补偿 [J]. J4, 201016, 21(16): 1902-1906. |
| [2] | 张迪嘉1, 2, 高路平2, 周少梁2, 高隆隆2, 李宝仁2. 高压气动压力伺服系统的鲁棒控制[J]. 中国机械工程, 2024, 35(07): 1141-1150. |
| [3] | 谢胜龙1;李铁风2;王斌锐1;陈迪剑1. 基于KP模型的气动肌肉迟滞建模方法[J]. 中国机械工程, 2020, 31(10): 1183-1189. |
| [4] | 郭振武;黄继清;王飞洋;王斌锐;陈迪剑. McKibben型气动肌肉模型改进与性能测试[J]. 中国机械工程, 2019, 30(19): 2313-2318,2328. |
| [5] | 谢苗, 刘治翔, 谢春雪, 毛君. 巷道超前支护装备双缸同步推移控制方法[J]. 中国机械工程, 2017, 28(04): 404-409. |
| [6] | 陈琳, 程正波, 黄炳琼, 潘海鸿, . 伺服增益不匹配的双轴同步误差补偿策略[J]. 中国机械工程, 2016, 27(11): 1502-1507. |
| [7] | 董振乐, 马大为, 姚建勇, 王晓锋. 含磁滞补偿的电液伺服系统预设性能跟踪控制[J]. 中国机械工程, 2016, 27(08): 995-1000. |
| [8] | 董伯麟, 刘洋, 王治森. 基于双NURBS参数混合插补算法的五轴联动交叉耦合控制器研究[J]. 中国机械工程, 2014, 25(22): 3038-3044. |
| [9] | 姚碧涛, 周祖德, 艾青松, 徐胜男. 气动肌肉质量项动力学建模及仿真 [J]. 中国机械工程, 2011, 22(14): 1719-1722. |
| [10] | 李小力, 陈威, 闫蓉. 基于BP神经网络的空间轮廓误差自适应补偿 [J]. 中国机械工程, 2010, 21(16): 1902-1906. |
| [11] | 倪敬, 彭丽辉, 项占琴. 有效容错控制及其在电液伺服同步系统中的应用 [J]. 中国机械工程, 2010, 21(11): 1342-1347. |
| [12] | 邢科新;徐琦;黄剑;王永骥;吴军;. 一种新型穿戴式手功能康复机器人[J]. J4, 2009, 20(20): 0-2398. |
| [13] | 王斌锐;周唯逸;许宏;. 形状记忆合金编织网气动肌肉的驱动特性[J]. J4, 2009, 20(04): 0-503. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||