


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (1): 66-72.DOI: 10.3969/j.issn.1004-132X.2026.01.008
王友利( ), 郭佳程, 王晓慧
), 郭佳程, 王晓慧
收稿日期:2024-08-30
出版日期:2026-01-25
发布日期:2026-02-05
通讯作者:
王友利
作者简介:王友利*(通信作者),女,1981年生,博士、副教授、硕士研究生导师。研究方向为机械设计理论、结构设计、机械制造过程中的尺寸精度设计。发表论文20余篇。E-mail:ylwang0522@163.com。基金资助:
WANG Youli(), GUO Jiacheng, WANG Xiaohui
Received:2024-08-30
Online:2026-01-25
Published:2026-02-05
Contact:
WANG Youli
摘要:
目前,空间瞬轴的主流求解方法为代数法,但机构稍复杂时代数法难以应用。从机构自由度本质为约束的观点出发,将机构运动副的约束用构件间的约束线来等效,研究了构件约束线数量及几何关系与构件自由度之间的关系。研究了构件约束线的性质与传递规律,证明了构件两条约束线的交点为构件的瞬心,两个约束面的交线为瞬轴,并从几何学角度论证了构件瞬心和瞬轴存在的充要条件。对构件约束线进行几何绘图和几何解析可确定机构构件的瞬心或瞬轴的位置。通过对Bennett机构连杆约束线的几何绘图和几何解析,求解了Bennett机构连杆的自由度和瞬轴,证明了从约束线出发求解构件瞬心和瞬轴方法的可行性。
中图分类号:
王友利, 郭佳程, 王晓慧. 基于约束线的瞬轴求解方法[J]. 中国机械工程, 2026, 37(1): 66-72.
WANG Youli, GUO Jiacheng, WANG Xiaohui. A Method for Solving Instantaneous Axes Based on Constraint Line[J]. China Mechanical Engineering, 2026, 37(1): 66-72.
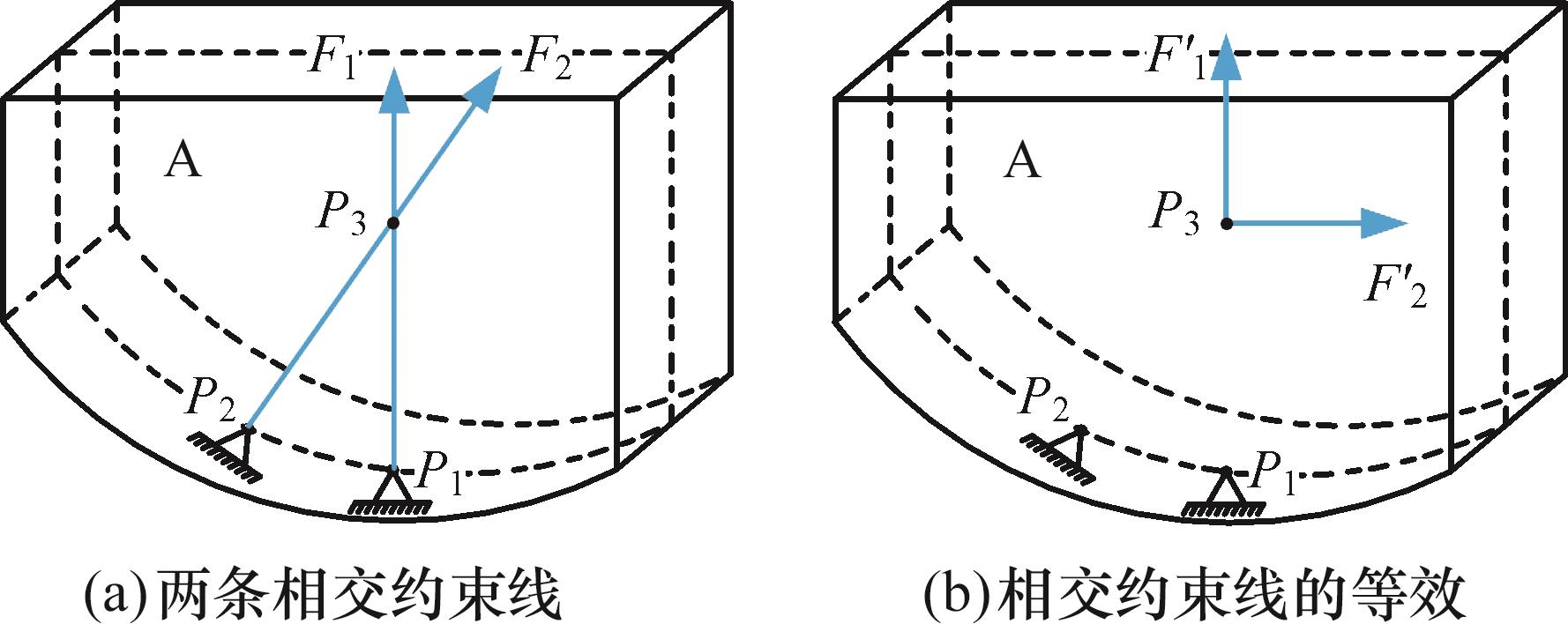
图1 两条相交约束线的关系及等效
Fig.1 The relationship and equivalence of two intersecting constraint lines

图2 刚体在平面内全约束的约束线分布
Fig.2 The distribution of constraint lines for a rigid body fully constrained in a plane
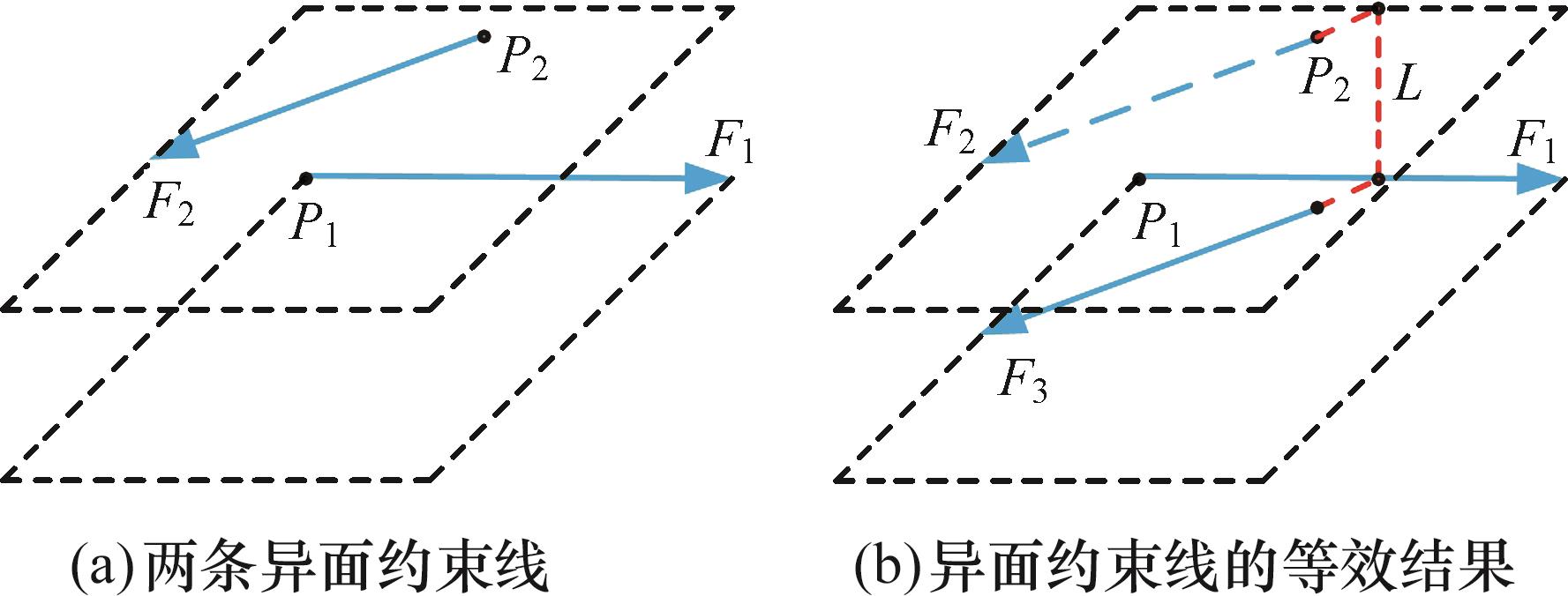
图3 两条异面约束线关系及等效结果
Fig.3 The relationship and equivalence of two constraint lines in different planes
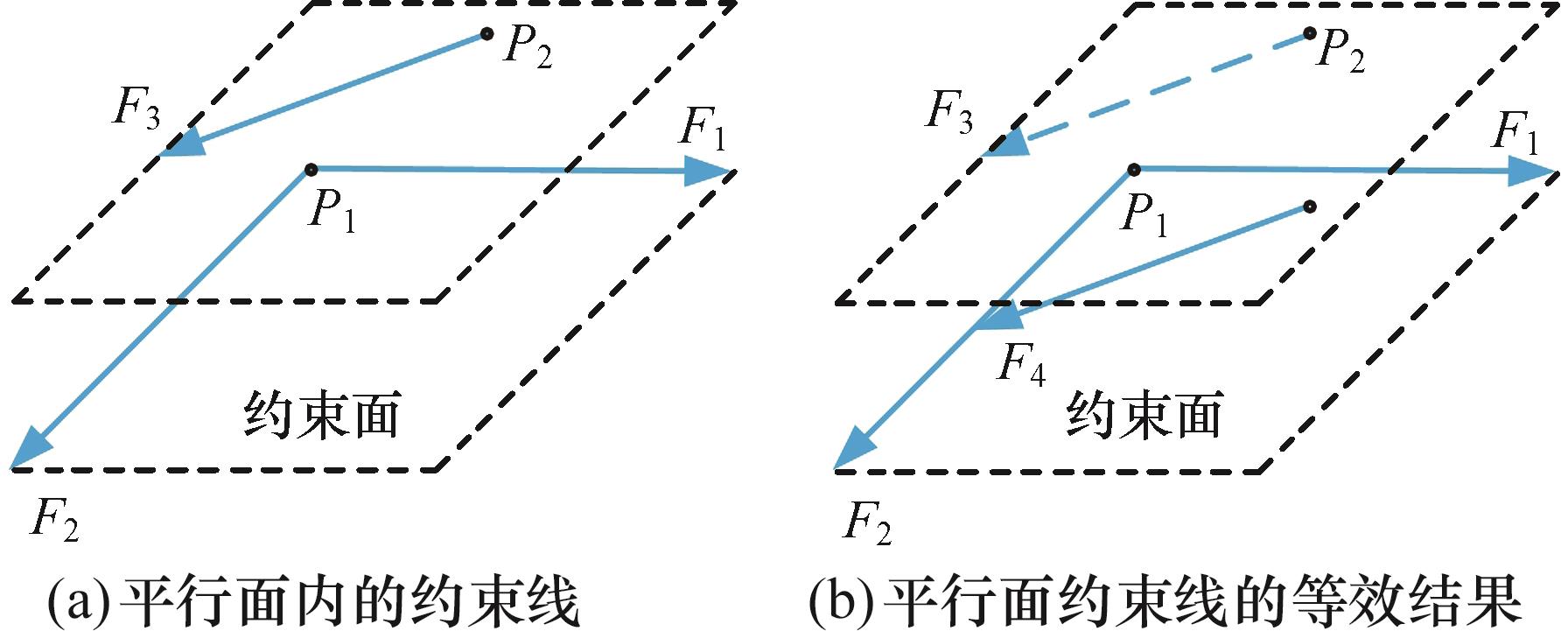
图4 平行面内的约束线关系及等效结果
Fig.4 The relationship and equivalence of constraint lines in parallel planes
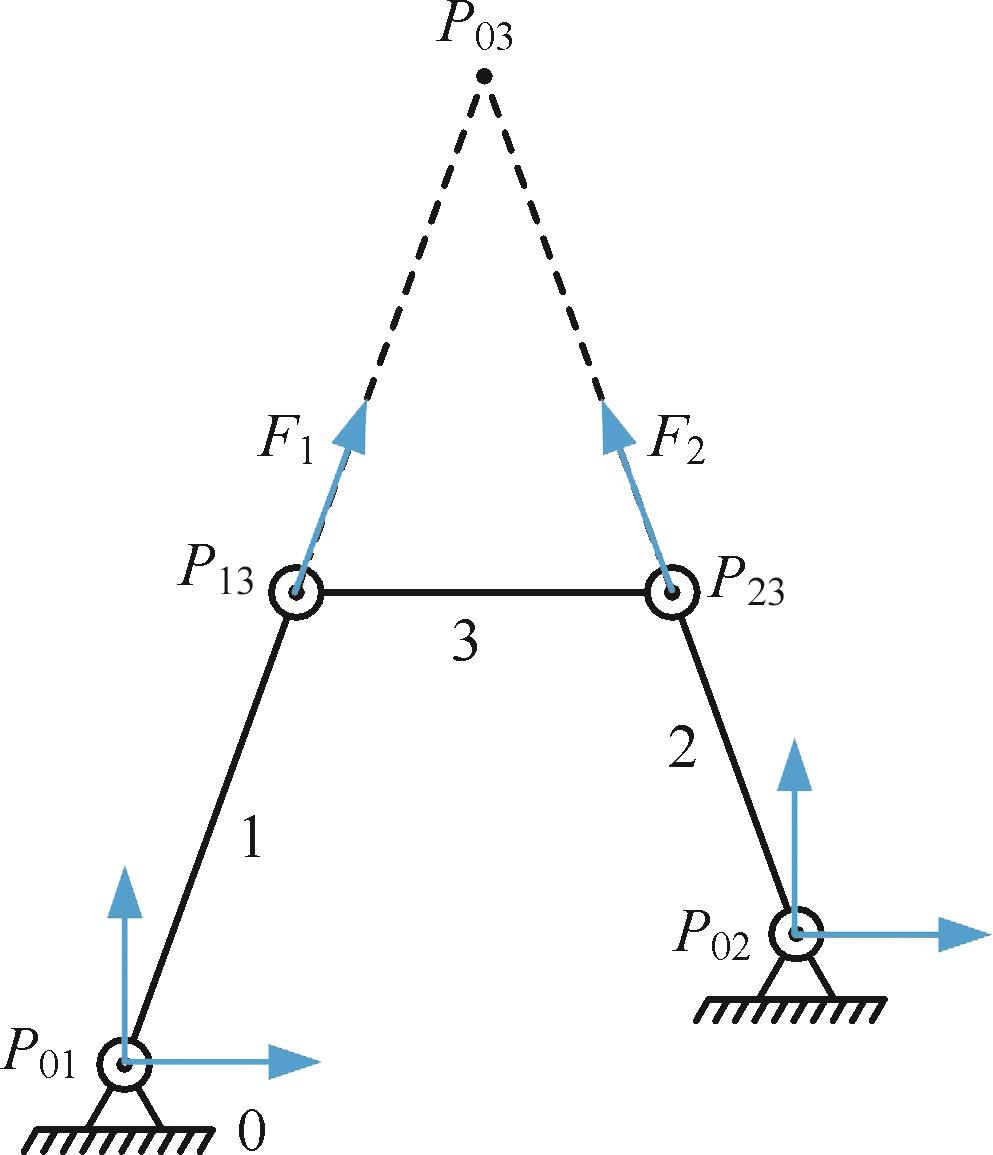
图5 平面机构瞬心求解
Fig.5 The solution of instantaneous center of planar mechanisms
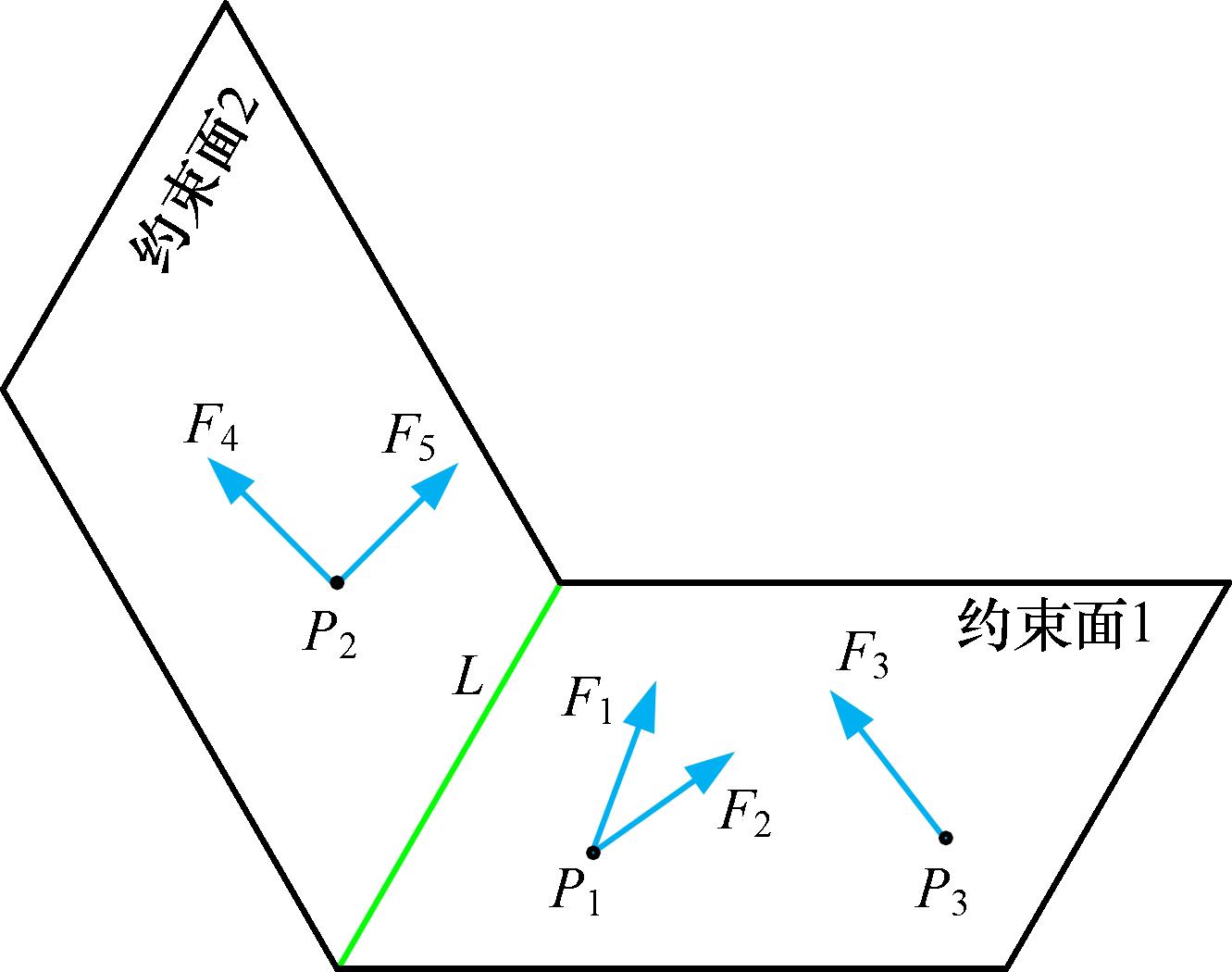
图6 基于约束线求解构件瞬轴的第一种情况
Fig.6 The first scenario of solving the instantaneous axes of components based on constraint line
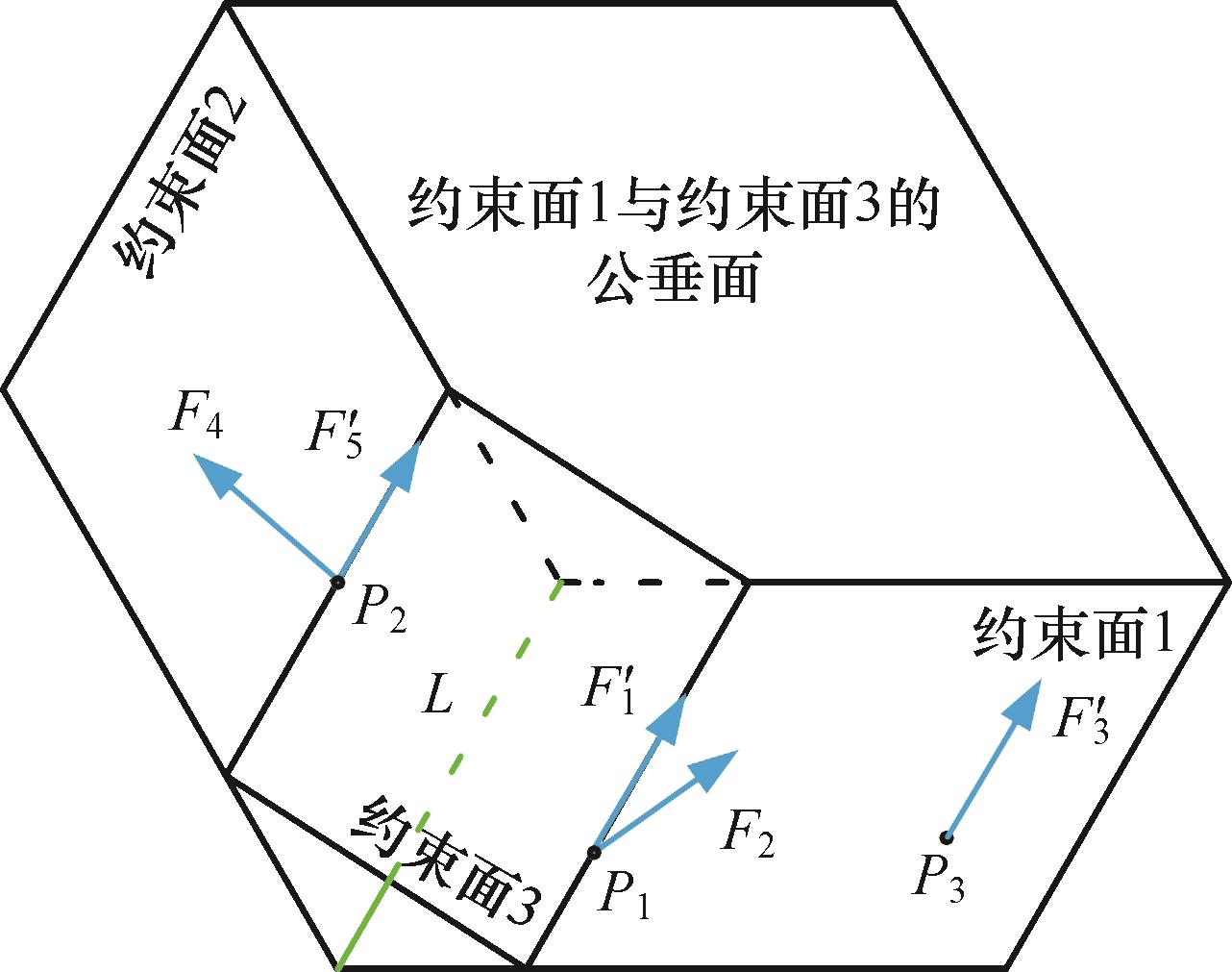
图7 对图6基于约束线求解构件瞬轴
Fig.7 Solution of component instantaneous axis based on constraint line in Fig.6
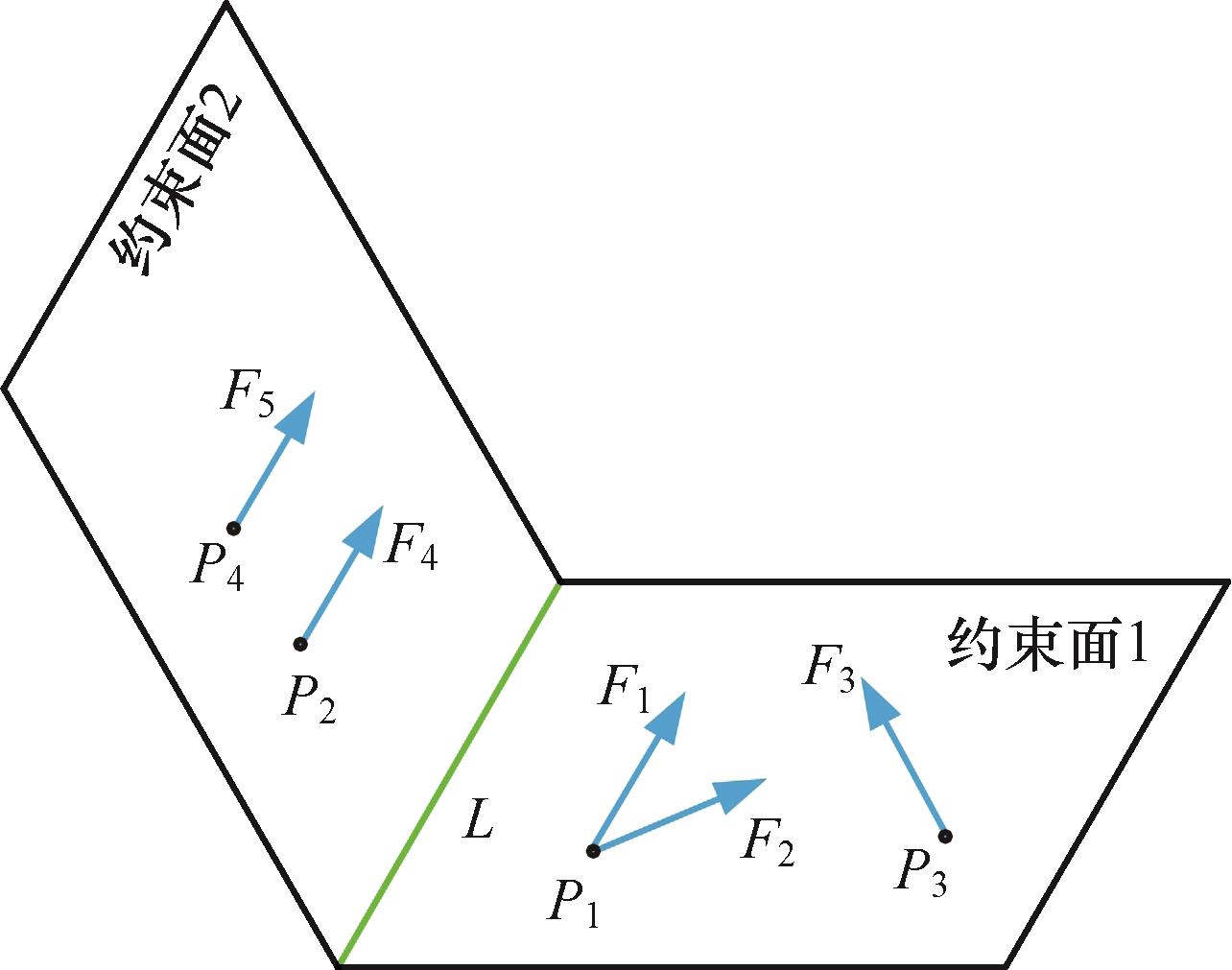
图8 基于约束线求解构件瞬轴的第二种情况
Fig.8 The second scenario of solving the instantaneous axes of components based on constraint line

图9 基于约束线求解构件瞬轴的第三种情况
Fig.9 The third scenario of solving the instantaneous axes of components based on constraint line

图10 Bennett机构
Fig.10 Bennett mechanism
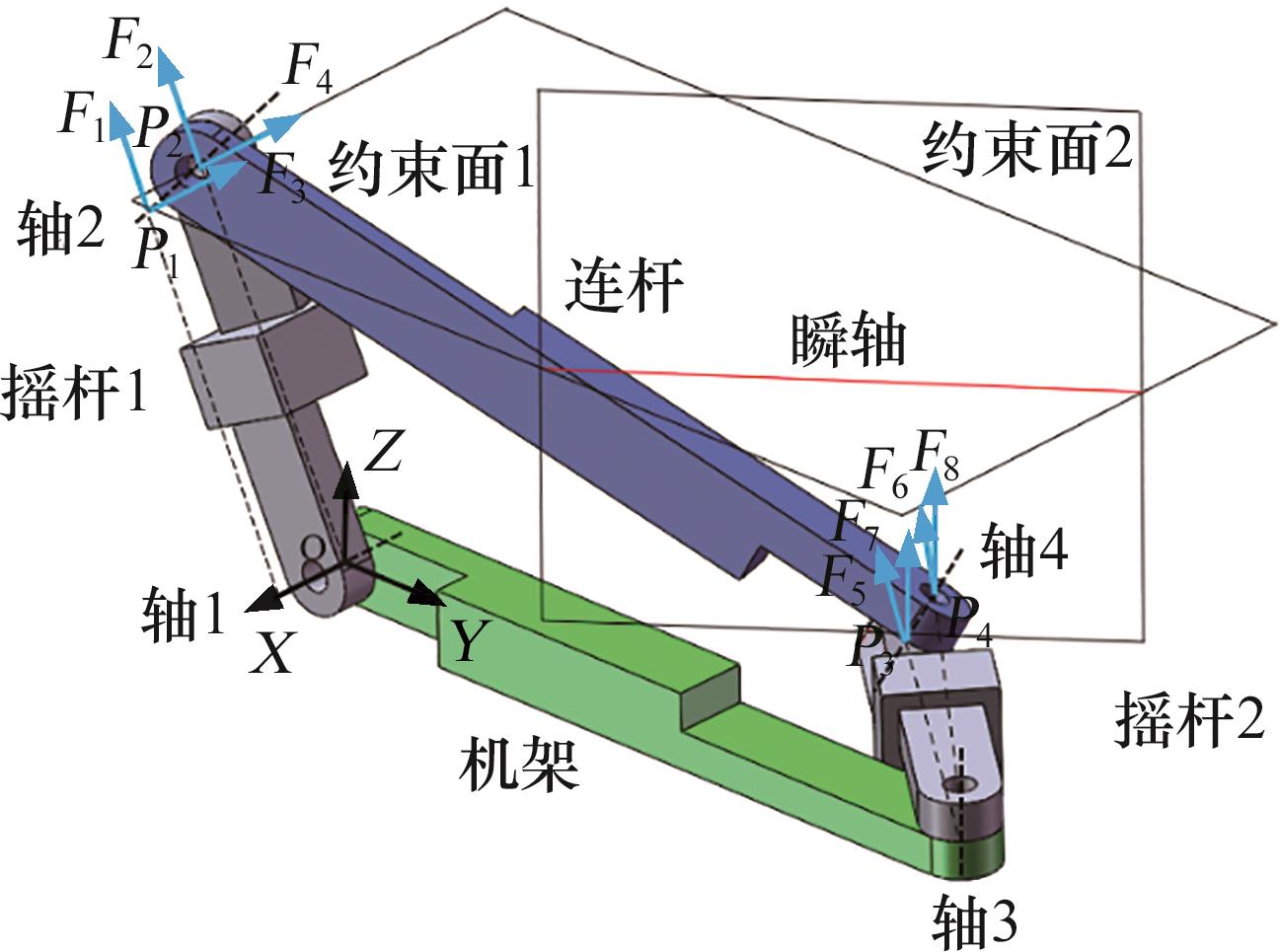
图11 Bennett机构中连杆的瞬轴分析
Fig.11 Analysis of the instantaneous axis of the connecting rod in a Bennett mechanism
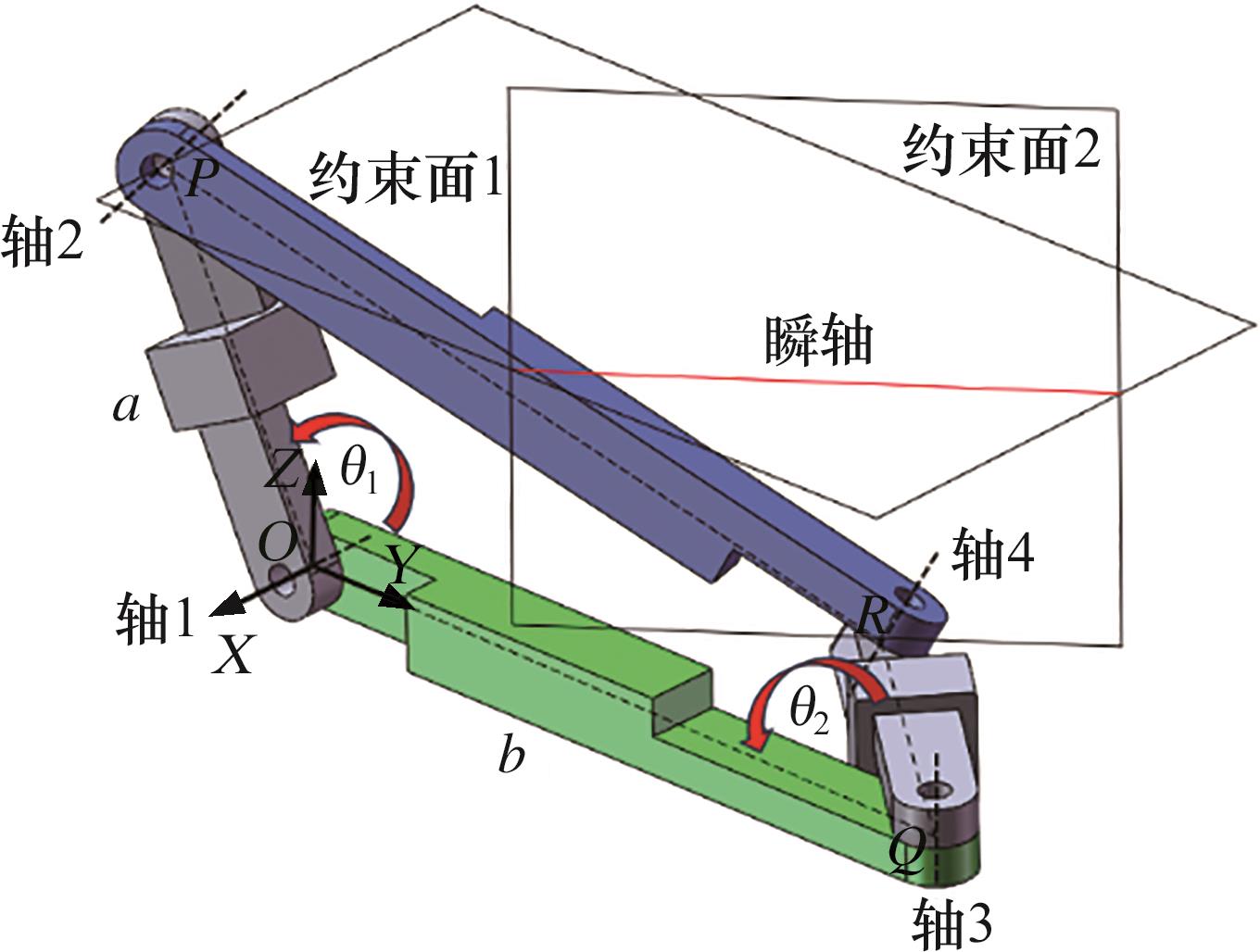
图12 连杆瞬轴方程求解
Fig.12 Solution of the instantaneous axis equation of the connecting rod
| [1] | 马砚樵, 千学明, 冯欢. 速度瞬心必然存在的证明与研究[J]. 机械工程师, 2016(7): 31-33. |
| MA Yanqiao, QIAN Xueming, FENG Huan. Proving and Researching the Inevitable Existence of Instantaneous Center of Velocity[J]. Mechanical Engineer, 2016(7): 31-33. | |
| [2] | 罗洪田. 浅谈隐交点作图法——介绍德沙格(Desargue)定理的应用[J]. 教材通讯, 1987(2): 35-37. |
| LUO Hongtian. On the Drawing Method of Hidden Intersection—Introducing the Application of Desargue Theorem[J]. China University Teaching, 1987(2): 35-37. | |
| [3] | 刘海生, 付正飞, 李春平. 复杂机构速度瞬心确定方法的研究[J]. 机械, 2008, 35(8): 17-19. |
| LIU Haisheng, FU Zhengfei, LI Chunping. The Research of Way for Locating Velocity Instantaneous Center of Complex Mechanism[J]. Machinery, 2008, 35(8): 17-19. | |
| [4] | 钱卫香, 杨银烁, 靳智超, 等. 瞬心无穷远近似直线导向机构综合及解域寻优方法[J]. 机械传动, 2023, 47(7): 29-34. |
| QIAN Weixiang, YANG Yinshuo, JIN Zhichao, et al. Synthesis and Solution Region Optimization Method of a Straight-line Mechanism with Instant Center at Infinity[J]. Journal of Mechanical Transmission, 2023, 47(7): 29-34. | |
| [5] | 杨浩然, 赵旺初, 胡家豪. 基于速度瞬心的无碳小车复杂轨迹运行方案与虚拟样机仿真[J]. 机械设计, 2023, 40(7): 15-19. |
| YANG Haoran, ZHAO Wangchu, HU Jiahao. Complex Trajectory Operation Scheme and Virtual Prototype Simulation of Carbon-free Car Based on Instantaneous Center of Velocity[J]. Journal of Machine Design, 2023, 40(7): 15-19. | |
| [6] | 黎朝阳, 罗天洪, 马翔宇, 等. 气动人工肌肉驱动的可变瞬心外骨骼设计与研究[J]. 中国机械工程, 2024, 35(10): 1783-1792. |
| LI Chaoyang, LUO Tianhong, MA Xiangyu, et al. Design and Research of Variable Instantaneous Center Exoskeletons Driven by Pneumatic Artificial Muscles[J]. China Mechanical Engineering, 2024, 35(10): 1783-1792. | |
| [7] | FOSTER D E, PENNOCK G R. A Study of the Instantaneous Centers of Velocity for Two-degree-of-freedom Planar Linkages[J]. Mechanism and Machine Theory, 2010, 45(4): 641-657. |
| [8] | FOSTER D E, PENNOCK G R. A Study of the Instantaneous Centers of Velocity for the 3-dof Planar Six-bar Linkage[J]. Mechanism and Machine Theory, 2011, 46(9): 1276-1300. |
| [9] | KIM M, HAN M S, SEO T, et al. A New Instantaneous Center Analysis Methodology for Planar Closed Chains via Graphical Representation[J]. International Journal of Control, Automation and Systems, 2016, 14(6): 1528-1534. |
| [10] | FERNANDES A C, ASGARI P, SOARES A R W. Asymmetric Roll Center of Symmetric Body in Beam Waves[J]. Ocean Engineering, 2016, 112: 66-75. |
| [11] | ASGARI P, FERNANDES A C, LOW Y M. Most often Instantaneous Rotation Center (MOIRC) for Roll Damping Assessment in the Free Decay Test of a FPSO[J]. Applied Ocean Research, 2020, 95: 102014. |
| [12] | 朱喜林, 江国宪. 空间机构运动中瞬轴面的动态模拟[J]. 吉林工业大学学报, 1994, 24(1): 57-60. |
| ZHU Xilin, JIANG Guoxian. Dynamic Simulation on Axode in a Movement of Space Mechanisms[J]. Journal of Jilin University (Engineering and Technology Edition), 1994, 24(1): 57-60. | |
| [13] | 陈子明, 黄真, 曹文熬. 空间少自由度并联机构瞬时螺旋运动轴线曲面的几何表示方法[J]. 燕山大学学报, 2012, 36(2): 113-118. |
| CHEN Ziming, HUANG Zhen, CAO Wenao. Geometric Expression of Axodes of Spatial Lower Mobility Parallel Mechanism[J]. Journal of Yanshan University, 2012, 36(2): 113-118. | |
| [14] | 张雷雷. 并联机构动定瞬轴面的螺旋对滚及其分布规律研究[D]. 秦皇岛: 燕山大学, 2022. |
| ZHANG Leilei. Theoretical Study on Screw Rolling between and Distribution Regularity of Fixed and Moving Axodes Traced by Parallel Mechanisms[D]. Qinhuangdao: Yanshan University, 2022. | |
| [15] | 张雷雷, 赵延治, 赵铁石. 并联机构瞬轴面研究进展[J]. 机械工程学报, 2023, 59(21): 131-146. |
| ZHANG Leilei, ZHAO Yanzhi, ZHAO Tieshi. State of the Art of Axodes Traced by Parallel Mechanism[J]. Journal of Mechanical Engineering, 2023, 59(21): 131-146. | |
| [16] | EHRIG R M, HELLER M O. On Intrinsic Equivalences of the Finite Helical Axis, the Instantaneous Helical Axis, and the SARA Approach. a Mathematical Perspective[J]. Journal of Biomechanics, 2019, 84: 4-10. |
| [17] | PAGE A, GALVEZ J A, de ROSARIO H, et al. Optimal Average Path of the Instantaneous Helical Axis in Planar Motions with One Functional Degree of Freedom[J]. Journal of Biomechanics, 2010, 43(2): 375-378. |
| [18] | PAGE Á, INGLÉS M, VENEGAS W, et al. Effect of Non-specific Neck Pain on the Path of the Instantaneous Axis of Rotation of the Neck during Its Flexion-extension Movement[J]. Musculoskeletal Science and Practice, 2023, 64: 102737. |
| [19] | Di GREGORIO R. Singularity Analysis of Spatial Single-DOF Mechanisms Based on the Locations of the Instantaneous Screw Axes[J]. Mechanism and Machine Theory, 2023, 189: 105438. |
| [20] | BRU B, PASQUI V. A New Method for Determining the Location of the Instantaneous Axis of Rotation during Human Movements[J]. Computer Methods in Biomechanics and Biomedical Engineering, 2009, 12(S1): 65-67. |
| [21] | 罗国军, 王晓慧, 闫献国, 等. 基于约束法线的多环耦合机构自由度分析计算[J]. 机械传动, 2022, 46(5): 62-67. |
| LUO Guojun, WANG Xiaohui, YAN Xianguo, et al. Analysis and Calculation of DOF of Multi-loop Coupling Mechanism Based on Constraint Normal Line[J]. Journal of Mechanical Transmission, 2022, 46(5): 62-67. | |
| [22] | 孙桓,陈作模,葛文杰. 机械原理[M]. 8版. 北京: 高等教育出版社,2013. |
| SUN Huan, CHEN Zuomo, GE Wenjie. Theory of Machines and Mechanisms[M]. 8th ed. Beijing: Higher Education Press,2013. |
| [1] | 唐欣尧, 殷榕, 王旭鹏, 杨佳音, 刘晓宜, 郝雨阳. 膝踝关节外骨骼人机匹配性设计与优化[J]. 中国机械工程, 2025, 36(10): 2369-2378. |
| [2] | 黎朝阳1, 罗天洪2, 马翔宇2, 方尚晨1, 王珂3. 气动人工肌肉驱动的可变瞬心外骨骼设计与研究[J]. 中国机械工程, 2024, 35(10): 1783-1792. |
| [3] | 曾祥, 周怡君, 袁伟钦, 罗晨. 基于Twin-Bennett机构固面可展开天线的优化设计[J]. 中国机械工程, 2021, 32(11): 1361-1369,1376. |
| [4] | 王君1;牛克佳1;聂良益2;何红秀1;陈智龙1;汪泉1;任军1. 单自由度复杂平面连杆机构的奇异性分析[J]. 中国机械工程, 2018, 29(01): 36-40. |
| [5] | 曾滔, 周志雄, 汤爱民, 肖思来, 左小陈. 碟形砂轮加工刀具螺旋槽的磨削参数研究[J]. 中国机械工程, 2015, 26(5): 575-580. |
| [6] | 郭晓宁;邹炎火;窦宁;. 基于瞬心的六杆机构死点位置研究[J]. J4, 2009, 20(14): 0-16391642. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||