


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (12): 2960-2967.DOI: 10.3969/j.issn.1004-132X.2025.12.019
印峰1( ), 黄欣1, 周佳义2
), 黄欣1, 周佳义2
收稿日期:2025-01-17
出版日期:2025-12-25
发布日期:2025-12-31
通讯作者:
印峰
作者简介:印峰*(通信作者),男,1983年生,博士、副教授。研究方向为机器人技术。E-mail:yinfeng83@126.com。
基金资助:
YIN Feng1(), HUANG Xin1, ZHOU Jiayi2
Received:2025-01-17
Online:2025-12-25
Published:2025-12-31
Contact:
YIN Feng
摘要:
为提高深度神经网络计算冗余机器人逆运动学解的精度,并降低自碰撞解的出现概率,提出了一种基于条件标准化流模型的求解方法。采用改进列文伯格-马夸尔特(L-M)算法对条件标准化流模型生成的初始解进行二次优化以提高计算精度。通过提取自碰撞先验信息训练多层感知机,构造自碰撞解检测器以剔除自碰撞解。结果表明,求解的位置和角度误差分别小于0.01 mm和0.1°,自碰撞率低于0.1%,并且单次计算的时间稳定在10 ms以内。该方法可用于对冗余机器人逆运动学问题的高效稳定求解。
中图分类号:
印峰, 黄欣, 周佳义. 基于流模型的冗余机器人逆运动学解高精度计算[J]. 中国机械工程, 2025, 36(12): 2960-2967.
YIN Feng, HUANG Xin, ZHOU Jiayi. High-precision Computation of Inverse Kinematics for Redundant Robots Based on Flow Model[J]. China Mechanical Engineering, 2025, 36(12): 2960-2967.
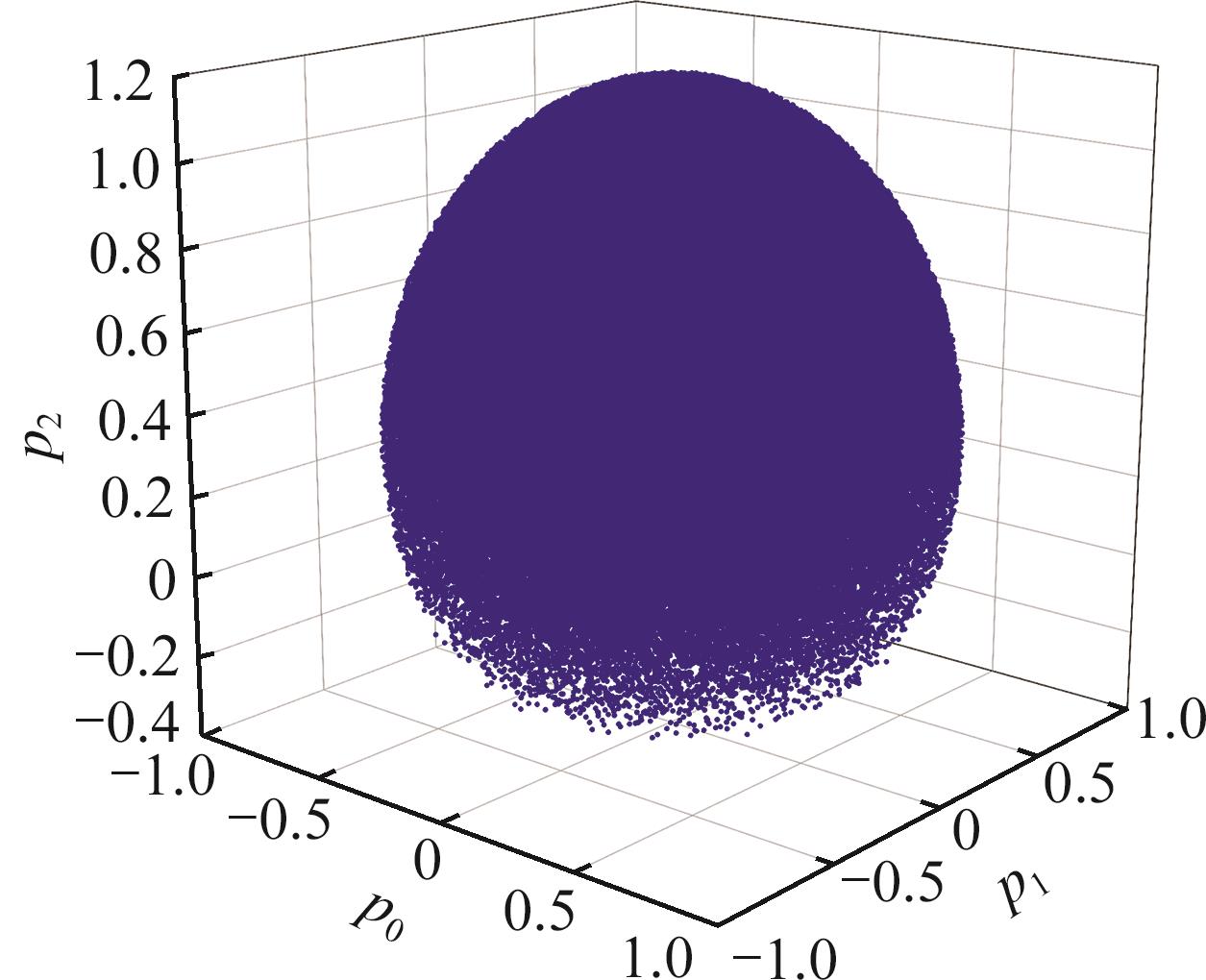
图1 Panda机器人训练条件数据集前三维分量
Fig.1 The first three dimensions of Panda robot training conditional dataset
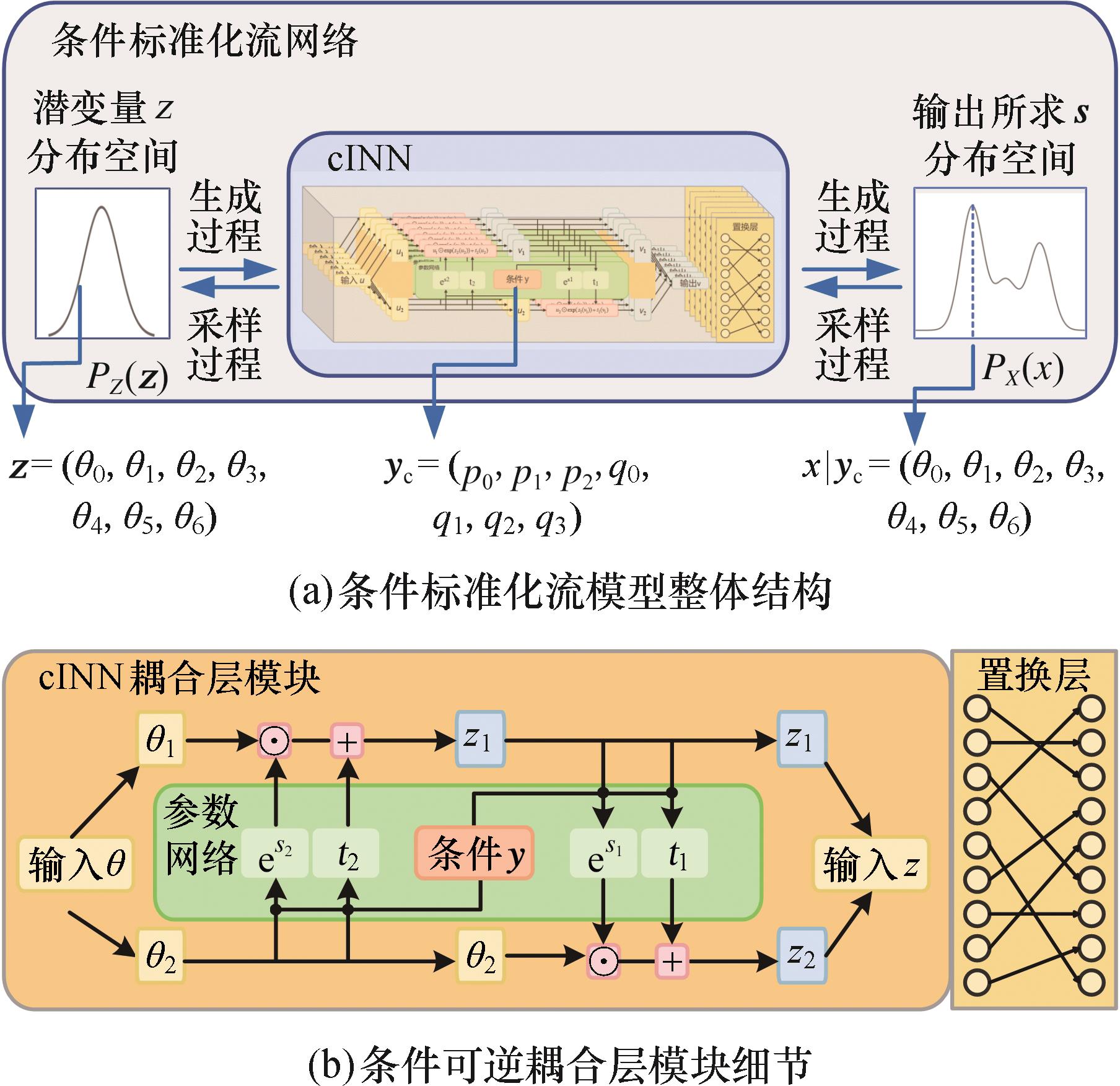
图2 条件标准化流模块网络结构图
Fig.2 Network architecture diagram of CNF module
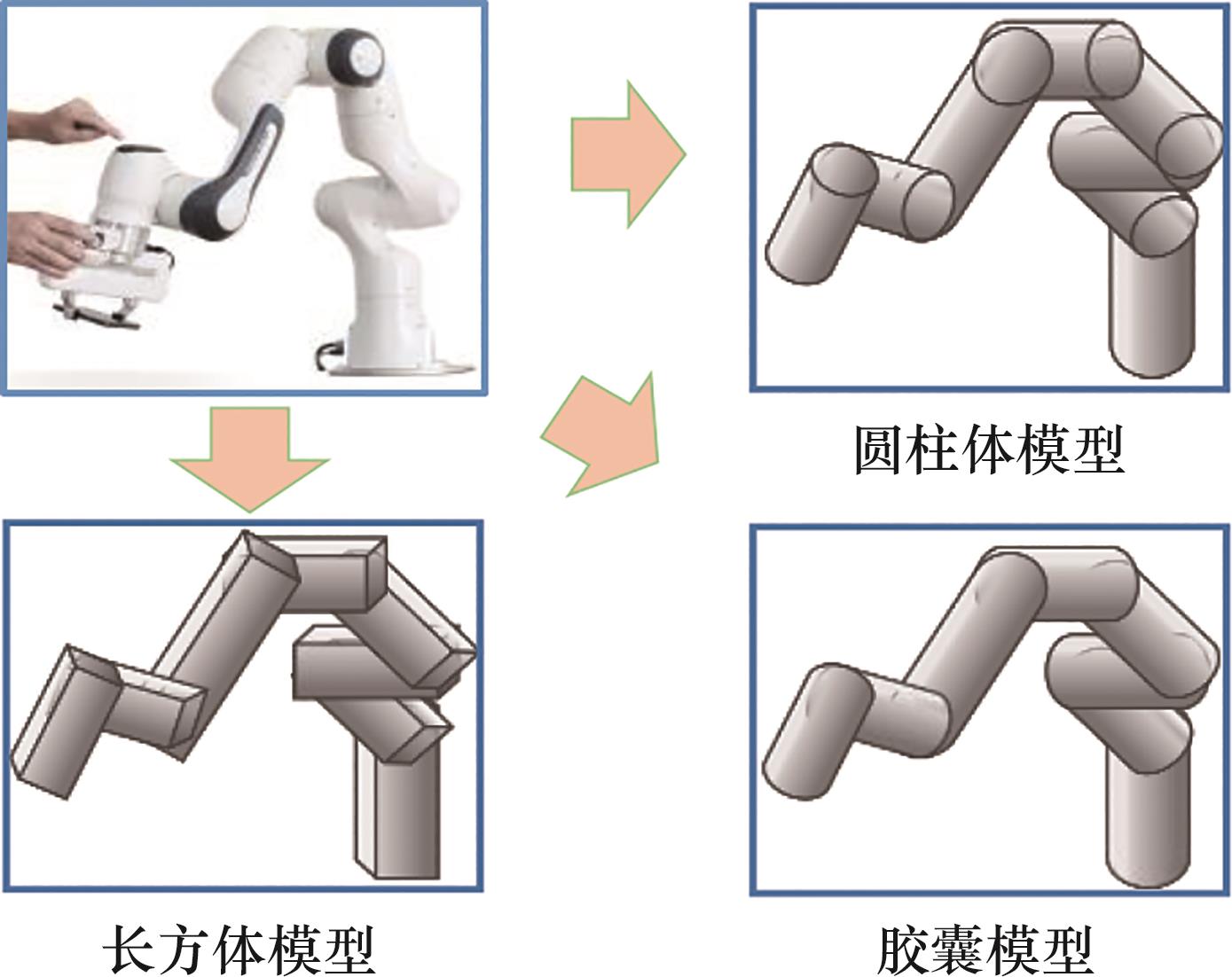
图3 机器人碰撞检测模型
Fig.3 Robot collision detection models
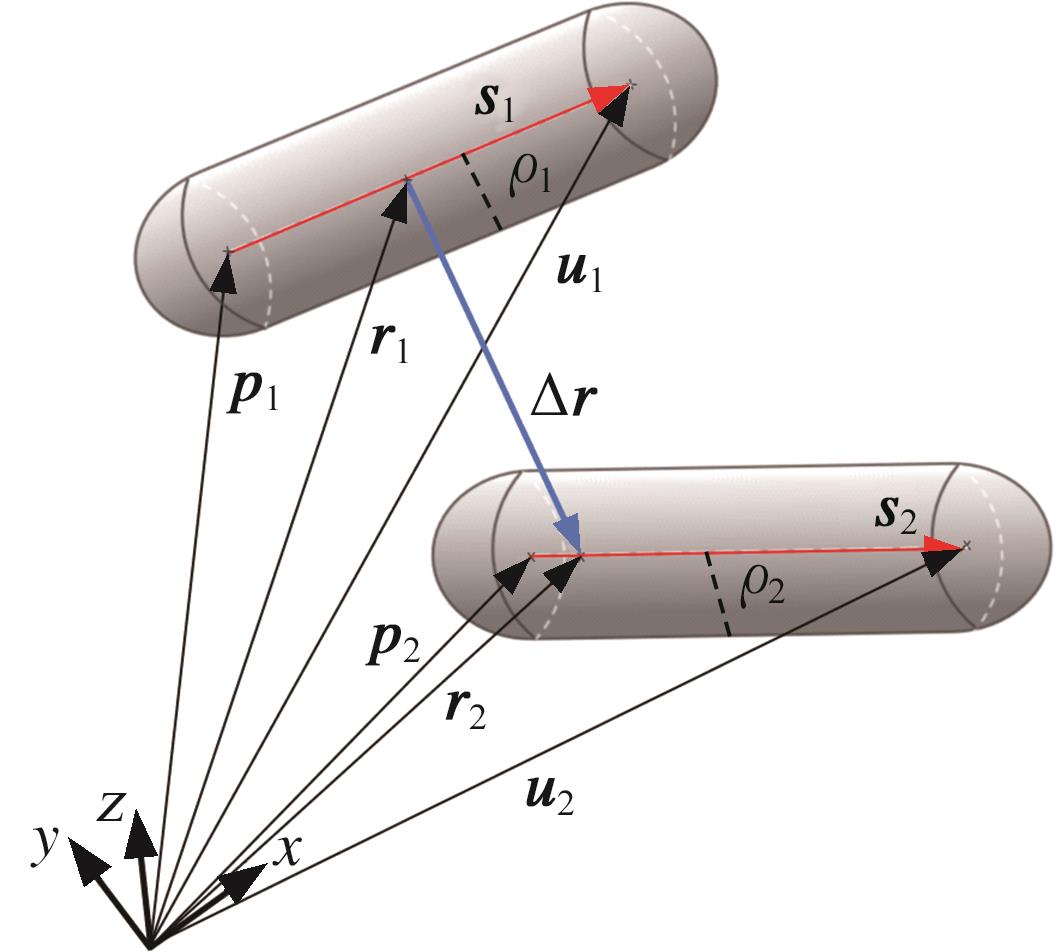
图4 胶囊间的最小距离Δr
Fig.4 The minimum distance Δr between capsules
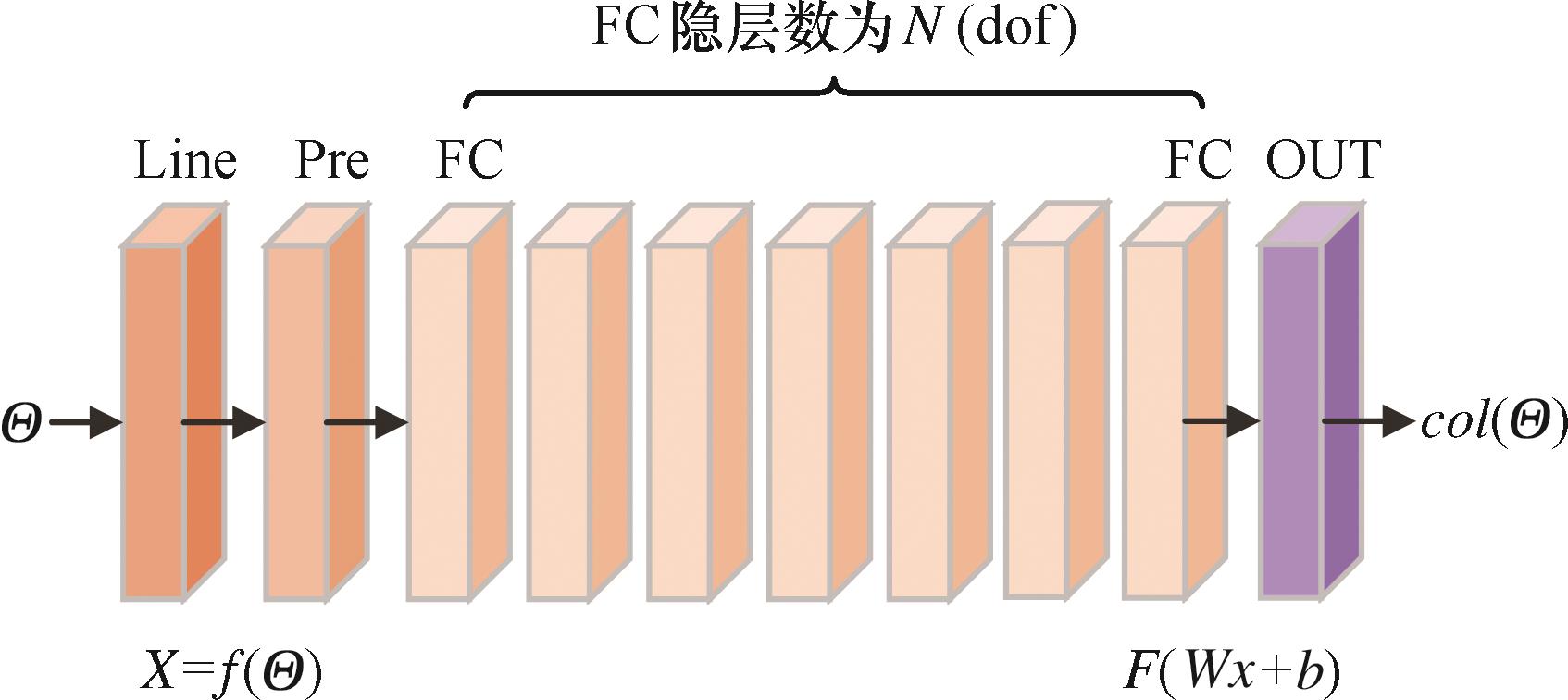
图5 多层感知机
Fig.5 Multi-layer perceptron
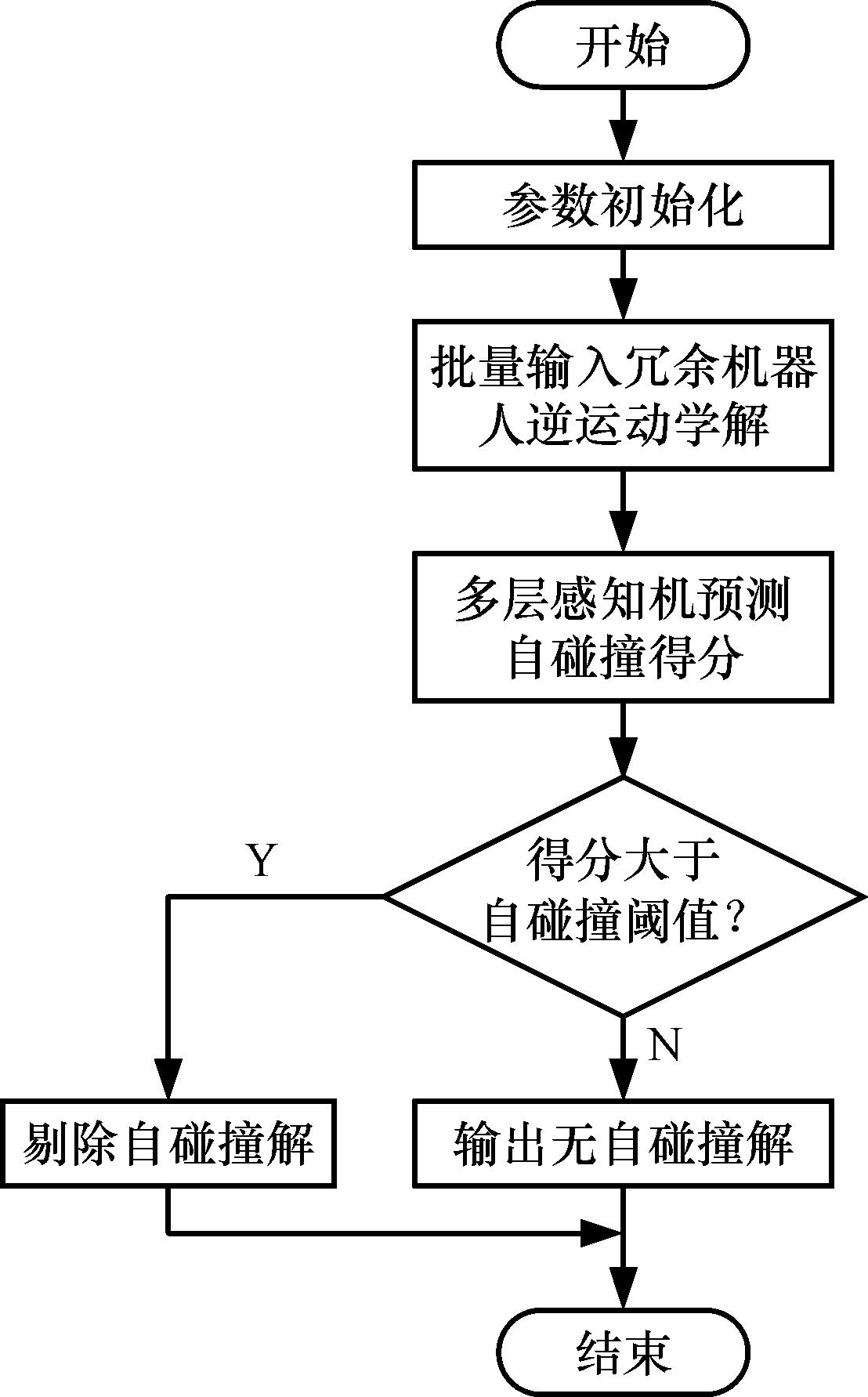
图6 自碰撞检测流程图
Fig.6 Self collision detection flowchart
| 模型 | MMD 得分 |
|---|---|
| INN | 0.061 |
| cINN | 0.058 |
| CGAN(Cycle IK) | 0.037 |
| CNL(IKFLOW) | 0.033 |
| CNF(NOC-IK) | 0.031 |
表1 生成网络的MMD得分
Tab.1 MMD scores of generative networks
| 模型 | MMD 得分 |
|---|---|
| INN | 0.061 |
| cINN | 0.058 |
| CGAN(Cycle IK) | 0.037 |
| CNL(IKFLOW) | 0.033 |
| CNF(NOC-IK) | 0.031 |
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 3.3376 | 1.4405 | 8.4781 | 6.052 |
| Panda | 12 | 6.3605 | 0.6826 | 2.2817 | 4.564 |
| Fetch | 12 | 6.1903 | 1.4507 | 0.7864 | 2.976 |
| Fetch | 16 | 7.29508 | 0.9792 | 3.6491 | 2.192 |
| Iiwa7 | 12 | 10.0659 | 2.0168 | 3.6801 | 0.028 |
表2 IKFLOW逆运动学求解结果
Tab.2 IKFLOW inverse kinematics solution results
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 3.3376 | 1.4405 | 8.4781 | 6.052 |
| Panda | 12 | 6.3605 | 0.6826 | 2.2817 | 4.564 |
| Fetch | 12 | 6.1903 | 1.4507 | 0.7864 | 2.976 |
| Fetch | 16 | 7.29508 | 0.9792 | 3.6491 | 2.192 |
| Iiwa7 | 12 | 10.0659 | 2.0168 | 3.6801 | 0.028 |
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 2.0621 | 1.0177 | 5.0036 | 2.330 |
| Panda | 12 | 3.9418 | 0.6808 | 2.1554 | 1.584 |
| Fetch | 12 | 3.9242 | 1.4843 | 0.6724 | 3.004 |
| Fetch | 16 | 5.1982 | 0.8601 | 1.8602 | 1.660 |
| Iiwa7 | 12 | 7.9731 | 1.3409 | 3.1826 | 0 |
表3 NOC-IK(CNF模块)逆运动学求解结果
Tab.3 NOC-IK(CNF)inverse kinematics solution results
| 机器人 | 隐藏 层数 | 每个解的 时间/ms | 平均L2位置 误差/cm | 平均角度 误差/(º) | 自碰撞 概率/% |
|---|---|---|---|---|---|
| Panda | 6 | 2.0621 | 1.0177 | 5.0036 | 2.330 |
| Panda | 12 | 3.9418 | 0.6808 | 2.1554 | 1.584 |
| Fetch | 12 | 3.9242 | 1.4843 | 0.6724 | 3.004 |
| Fetch | 16 | 5.1982 | 0.8601 | 1.8602 | 1.660 |
| Iiwa7 | 12 | 7.9731 | 1.3409 | 3.1826 | 0 |
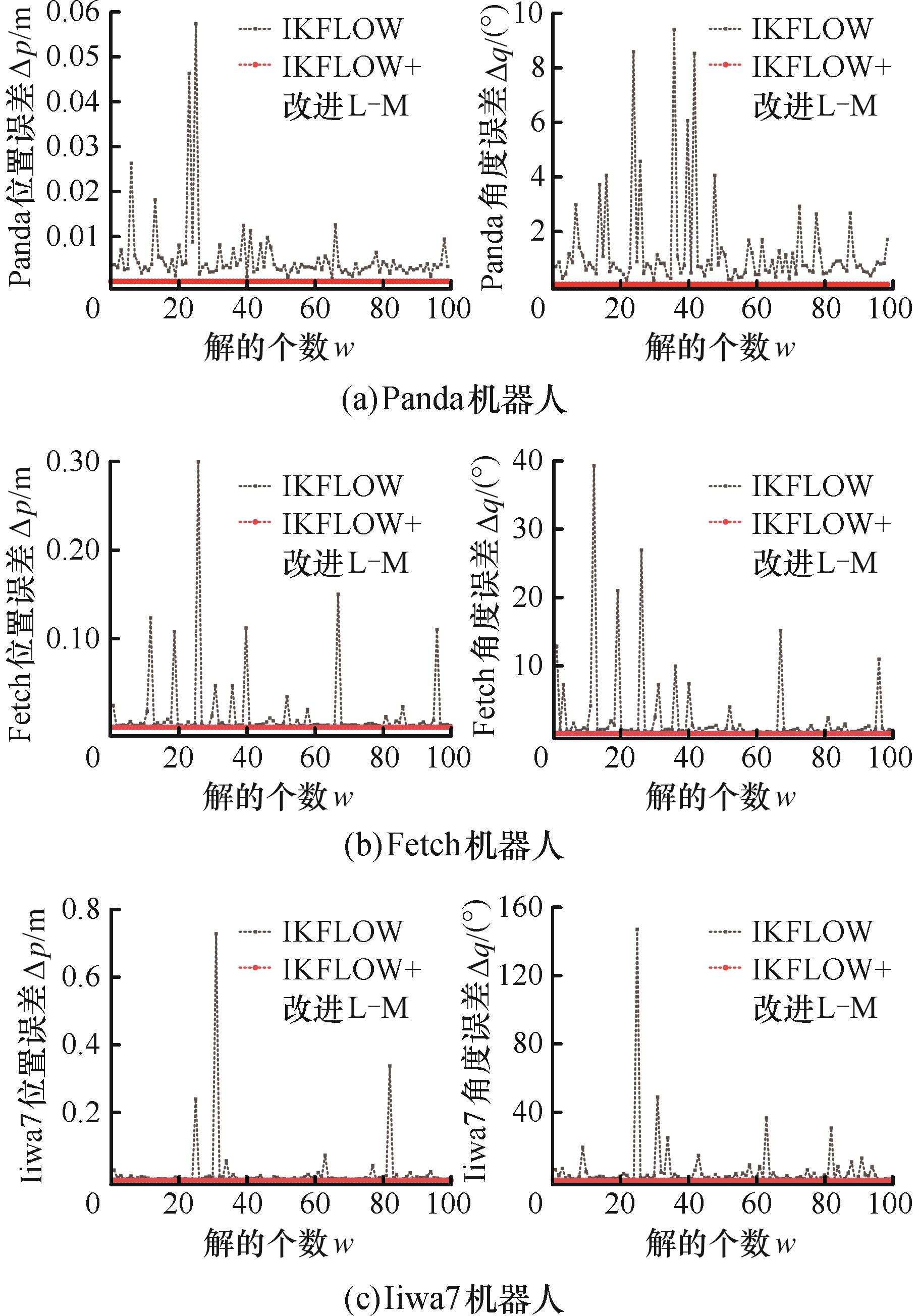
图7 机器人平均位姿误差对比
Fig.7 Comparison of average pose errors of robots
| 方法 | 每个解的时间/ms | 输出自碰撞解个数 |
|---|---|---|
| FCL | 1.5855 | 0 |
| 7.4157 | 0 | |
| MLP | 0.2651 | 0 |
表4 自碰撞检测结果
Tab.4 Self-collision detection results
| 方法 | 每个解的时间/ms | 输出自碰撞解个数 |
|---|---|---|
| FCL | 1.5855 | 0 |
| 7.4157 | 0 | |
| MLP | 0.2651 | 0 |
| 模块 | 均方误差/cm | 平均自碰撞 概率/% | 每个解的 时间/ms |
|---|---|---|---|
| CNF | 0.682 | 2.572 | 5.9743 |
| CNF+L-M | 0.001 | 3.135 | 7.3429 |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
表5 消融实验结果
Tab.5 Experimental results of ablation
| 模块 | 均方误差/cm | 平均自碰撞 概率/% | 每个解的 时间/ms |
|---|---|---|---|
| CNF | 0.682 | 2.572 | 5.9743 |
| CNF+L-M | 0.001 | 3.135 | 7.3429 |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
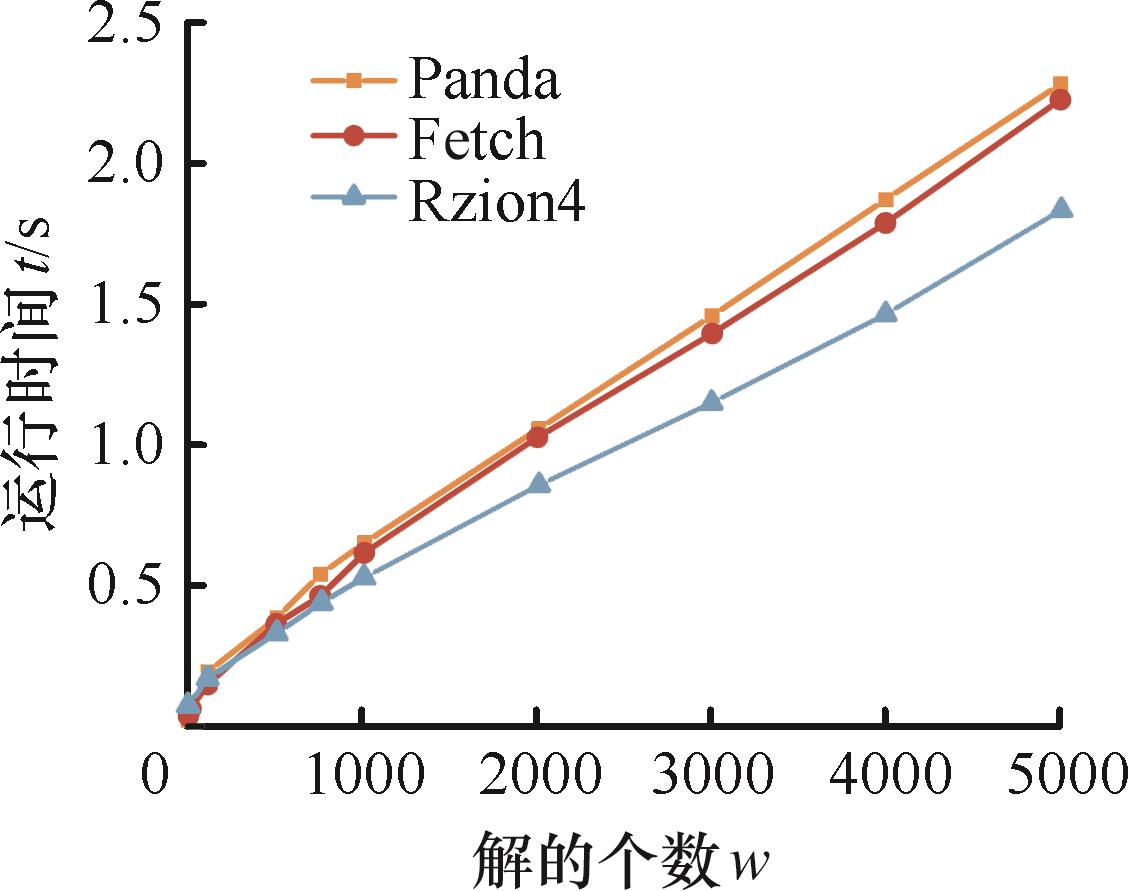
图8 NOC-IK的总运行时间
Fig.8 Total running time of NOC-IK
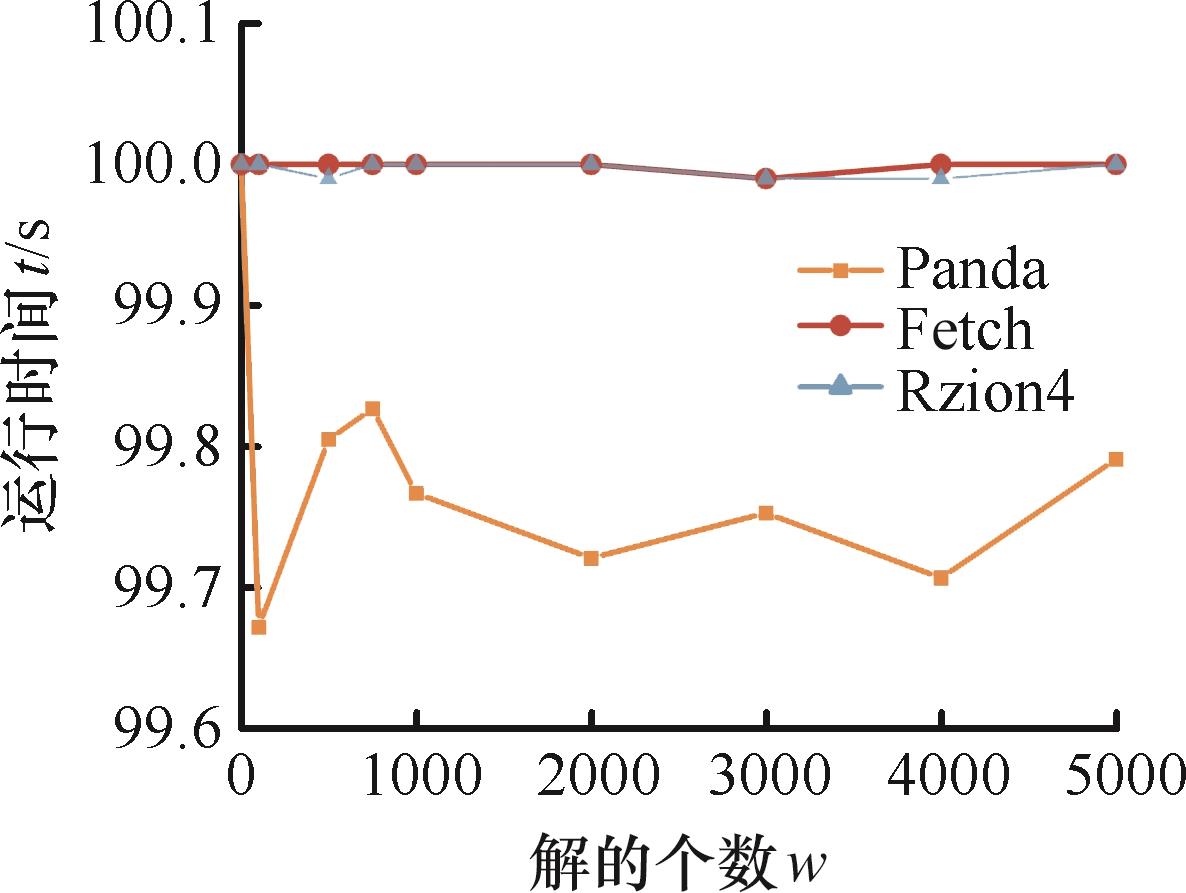
图9 自碰撞检测准确率
Fig.9 The self-collision probability
| 模型 | 均方误差/cm | 平均自碰撞概率/% | 每个解的 时间/ms |
|---|---|---|---|
| B-NAFs | 3.871 | 0.300 | 0.6800 |
| BP | 0.980 | 16.7800 | |
| ResNet-BP | 0.600 | 8.7000 | |
| IKFLOW | 0.772 | 6.732 | 6.7322 |
| CycleIK[ | 0.570 | 0.4100 | |
| CycleIK-Gaikpy[ | 0.051 | 20.0071 | |
| CNN | 0.012 | 12.9600 | |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
表6 与其他方法比较的结果
Tab.6 The results of comparison with other models
| 模型 | 均方误差/cm | 平均自碰撞概率/% | 每个解的 时间/ms |
|---|---|---|---|
| B-NAFs | 3.871 | 0.300 | 0.6800 |
| BP | 0.980 | 16.7800 | |
| ResNet-BP | 0.600 | 8.7000 | |
| IKFLOW | 0.772 | 6.732 | 6.7322 |
| CycleIK[ | 0.570 | 0.4100 | |
| CycleIK-Gaikpy[ | 0.051 | 20.0071 | |
| CNN | 0.012 | 12.9600 | |
| NOC-IK | 0.001 | 0.077 | 9.9425 |
| [1] | 欧群文,贠超,杨学兵,等.基于神经网络的冗余机械臂运动学逆解研究[J].机电工程,2016,33(6):663-667. |
| Qunwen OU, YUN Chao, YANG Xuebing, et al. Algorithm Based on Neural Network for Inverse Kinematics of Redundant Manipulator[J] Journal of Mechanical & Electrical Engineering, 2016,33 (6): 663-667. | |
| [2] | 李进,刘璇,张建华,等.基于RBF神经网络间接求取运动学逆解的研究[J].机床与液压,2019,47(23):32-37. |
| LI Jin, LIU Xuan, ZHANG Jianhua, et al. Research on Indirect Solution of Inverse Kinematics Based on RBF Neural Network[J]. Machine Tool & Hydraulics, 2019,47(23):32-37. | |
| [3] | 刘世平,曹俊峰,孙涛,等.基于BP神经网络的冗余机械臂逆运动学分析[J].中国机械工程, 2019,30(24): 2974-2977. |
| LIU Shiping, CAO Junfeng, SUN Tao, et al. Inverse Kinematics Analysis of Redundant Manipulators Based on BP Neural Network[J]. China Mechanical Engineering,2019,30(24):2974-2977. | |
| [4] | 刘世平,夏文杰,陈萌,等.基于卷积神经网络的冗余机械臂运动学逆解求解[J].载人航天,2022,28(1):10-15. |
| LIU Shiping, XIA Wenjie, CHEN Meng, et al. Inverse Kinematics Solution of Redundant Manipulator Based on Convolution Neural Networks[J]. Manned Spaceflight,2022,28(1):10-15. | |
| [5] | 石建平.基于粒子群优化算法的冗余机械臂运动学逆解[J].贵阳学院学报(自然科学版),2020,15(3):48-52. |
| SHI Jianping. Inverse Kinematics Solution of Redundant Manipulator Based on Particle Swarm Optimization Algorithm[J]. Journal of Guiyang University(Natural Sciences),2020,15(3):48-52. | |
| [6] | ARDIZZONE L, KRUSE J, WIRKERT S, et al. Analyzing Inverse Problems with Invertible Neural Networks[C]∥International Conference on Learning Representations (ICLR).New Orleans, 2019:1808.04730. |
| [7] | GARG S, DUDEJA S, RASTOGI V. Inverse Kinematics of Tendon Driven Continuum Robots Using Invertible Neural Network[C]∥2022 2nd International Conference on Computers and Automation (CompAuto). Paris, 2022: 82-86. |
| [8] | AMES B, MORGAN J, KONIDARIS G. IKFLOW: Generating Diverse Inverse Kinematics Solutions[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 7177-7184. |
| [9] | PAPAMAKARIOS G, NALISNICK E, JIMENEZ REZENDE D, et al. Normalizing Flows for Probabilistic Modeling and Inference[J]. Journal of Machine Learning Research,2019, 57(22):64. |
| [10] | KINGMA D P, DHARIWAL P. GLOW: Generative Flow with Invertible 1×1 Convolutions[C]∥The 32nd International Conference on Neural Information Processing Systems (NIPS'18). Red Hook, 2018: 10236-10245. |
| [11] | BEESON P, AMES B. TRAC-IK: an Open-source Library for Improved Solving of Generic Inverse Kinematics[C]∥2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids). Seoul, 2015: 928-935. |
| [12] | HABEKOST J G, STRAHL E, ALLGEUER P, et al. CycleIK: Neuro-inspired Inverse Kinematics[C]∥ International Conference on Artificial Neural Networks. Heraklion, 2023: 457-470. |
| [13] | ZHU J Y, PARK T, ISOLA P, et al. Unpaired Image-to-image Translation Using Cycle-consistent Adversarial Networks [C] ∥Proceedings of the IEEE International Conference on Computer Vision. Venice, 2017: 2223-2232. |
| [14] | KERZEL M, ALLGEUER P, STRAHL E, et al. Nicol: a Neuro-inspired Collaborative Semi-humanoid Robot that Bridges Social Interaction and Reliable Manipulation[J].IEEE Access,2023, 11: 123531-123542. |
| [15] | DEMBY’S J, GAO Y, DESOUZA G N. A Study on Solving the Inverse Kinematics of Serial Robots Using Artificial Neural Network and Fuzzy Neural Network[C]∥2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE).New Orleans, 2019: 1-6. |
| [16] | GILBERT E G, FOO C P. Computing the Distance between General Convex Objects in Three-dimensional Space[J]. IEEE Transactions on Robotics and Automation, 1990, 6(1): 53-61. |
| [17] | SAFEEA M, NETO P, BEAREE R. Efficient Calculation of Minimum Distance Between Capsules and Its Use in Robotics[J]. IEEE Access, 2018, 7: 5368-5373. |
| [18] | NVIDIA GPU Technology Conference GTC). Warp: a High-performance Python Framework for GPU Simulation and Graphics[EB/OL].(2022-03-31)[2025-01-03].. |
| [19] | KIM H, LEE H, KANG W H, et al. Softflow: Probabilistic Framework for Normalizing Flow on Manifolds[J]. Neural Information Processing Systems, 2020, 33: 16388-16397. |
| [20] | PADMANABHA G A, ZABARAS N. Solving Inverse Problems Using Conditional Invertible Neural Networks[J]. Journal of Computational Physics, 2021, 433: 110194. |
| [21] | 李佳,邱伟,邹劭芬.基于改进LM-GN算法的磁性目标定位方法研究[J].数字海洋与水下攻防, 2023,6(5): 552-561. |
| LI Jia, QIU Wei, ZOU Shaofen. Research on Magnetic Target Localization Based on Improved LM-GN Algorithm[J]. Digital Ocean & Underwater Warfare, 2023,6(5):552-561. | |
| [22] | 李国民,宿梦瑶,朱代先.光束平差法中的一种改进LM算法[J].西安科技大学学报,2022,42(1):152-159. |
| LI Guoming, SU Mengyao, ZHU Daixian. An Improved LM Algorithm in Bundle Adjustment[J]. Journal of Xi'an University of Science and Technology, 2022,42(1): 152-159. | |
| [23] | RAKITA D, MUTLU B, GLEICHER M. RelaxedIK: Real-time Synthesis of Accurate and Feasible Robot Arm Motion[C]∥Robotics: Science and Systems (RSS 2018.Pittsburgh, 2018:46968269. |
| [1] | 王旭浩, 盛卧龙, 吴孟丽, 许贻龙, 赵晓巍, 曹轶然. 可伸缩蛇形臂机器人的设计及运动学建模[J]. 中国机械工程, 2025, 36(12): 2885-2893. |
| [2] | 董佳祥, 刘铨权, 胡希平, 赵学智. 新型刚柔混联连续体机器人运动建模[J]. 中国机械工程, 2025, 36(11): 2678-2684. |
| [3] | 王志强1, 韩建海1, 2, 3, 李向攀1, 2, 郭冰菁1, 2, 杜敢琴4. 冗余机器人的笛卡儿空间螺旋线性插值轨迹规划[J]. 中国机械工程, 2025, 36(01): 104-112. |
| [4] | 陈卓凡, 周坤, 秦菲菲, 王斌锐. 基于改进量子粒子群优化算法的机器人逆运动学求解#br#
#br#
[J]. 中国机械工程, 2024, 35(02): 293-304. |
| [5] | 刘雪梅, 冯焱, 杨振, 李爱平, 卢军国. 冗余机器人喷涂系统改进人工鱼群逆运动学求解算法[J]. 中国机械工程, 2022, 33(11): 1317-1323. |
| [6] | 刘秀莹, 张建军, 刘承磊, 牛建业, 戚开诚, 郭士杰. 基于工作空间的踝关节康复广义球面并联机器人运动学参数优化[J]. 中国机械工程, 2021, 32(16): 1921-1929. |
| [7] | 张月, 董雷, 宦荣华, 黄志龙. 风电叶片管道内窥履带机器人的设计与运动分析[J]. 中国机械工程, 2021, 32(15): 1884-1889. |
| [8] | 吉阳珍, 侯力, 罗岚, 罗培, 刘旭槟, 梁爽. 基于组合优化算法的6R机器人逆运动学求解[J]. 中国机械工程, 2021, 32(10): 1222-1232. |
| [9] | 肖帆;李光;游雨龙. 空间3R机械手逆向运动学的多模块神经网络求解[J]. 中国机械工程, 2019, 30(10): 1233-1238. |
| [10] | 裴九芳;许德章;王海. 基于旋量理论的三指机器人灵巧手逆运动学分析[J]. 中国机械工程, 2017, 28(24): 2975-2980. |
| [11] | 杨震, 杨文玉, 张晓平. 机器人逆运动学的奇异鲁棒性算法[J]. 中国机械工程, 2014, 25(8): 995-1000. |
| [12] | 刘玮, 常思勤. 一种新型并联机器人的奇异性与工作空间研究[J]. 中国机械工程, 2012, 23(7): 786-790. |
| [13] | 印峰, 王耀南, 夏汉民. 多关节机器人逆运动学问题的实时求解 [J]. 中国机械工程, 2010, 21(10): 1143-1148. |
| [14] | 赵大兴;李九灵;赵智明;周小明;. 集装箱喷漆机器人逆运动学分析[J]. J4, 2008, 19(22): 0-2649. |
| [15] | 王平, 杨沿平, 邓晓. 基于模具表面抛光机器人系统的运动控制研究[J]. 中国机械工程, 2007, 18(20): 2422-2425. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||