


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (11): 2694-2703.DOI: 10.3969/j.issn.1004-132X.2025.11.027
戴尧( ), 曾勇(), 赵雪雅, 万俊豪, 顾金彤, 祝欣怡
), 曾勇(), 赵雪雅, 万俊豪, 顾金彤, 祝欣怡
收稿日期:2024-09-26
出版日期:2025-11-25
发布日期:2025-12-09
通讯作者:
曾勇
作者简介:戴尧,男,1999年生,硕士研究生。研究方向为喷涂理论与技术。E-mail:2465975371@qq.com基金资助:
Yao DAI(), Yong ZENG(), Xueya ZHAO, Junhao WAN, Jintong GU, Xinyi ZHU
Received:2024-09-26
Online:2025-11-25
Published:2025-12-09
Contact:
Yong ZENG
摘要:
针对凸起凹陷特征表面喷涂的涂层均匀性优化问题,提出了一种基于变位姿喷涂工艺的喷涂轨迹优化方法。研究了垂直喷涂和变位姿喷涂时凸起凹陷几何参数对涂层均匀性的影响规律,并探讨了适用垂直喷涂方法的凸起高度和凹陷深度范围;针对不适用垂直喷涂的凸起凹陷特征,提出了一种采用圆弧过渡的连续变倾角喷涂轨迹优化方法;最后,建立连续变倾角涂层厚度模型和优化目标模型以提高凸起凹陷特征表面的涂层均匀性。仿真与实验结果表明,相较于垂直喷涂方法,所提出的方法应用于凸起凹陷特征表面时,膜厚标准差降低41.06%,能满足膜厚精度要求的区域占比提高15.23%。
中图分类号:
戴尧, 曾勇, 赵雪雅, 万俊豪, 顾金彤, 祝欣怡. 凸起凹陷特征表面的机器人变位姿喷涂涂层均匀性优化研究[J]. 中国机械工程, 2025, 36(11): 2694-2703.
Yao DAI, Yong ZENG, Xueya ZHAO, Junhao WAN, Jintong GU, Xinyi ZHU. Research on Optimization of Uniformity of Robot Spraying Coatings for Changing Positions on Convex and Concave Characteristic Surfaces[J]. China Mechanical Engineering, 2025, 36(11): 2694-2703.
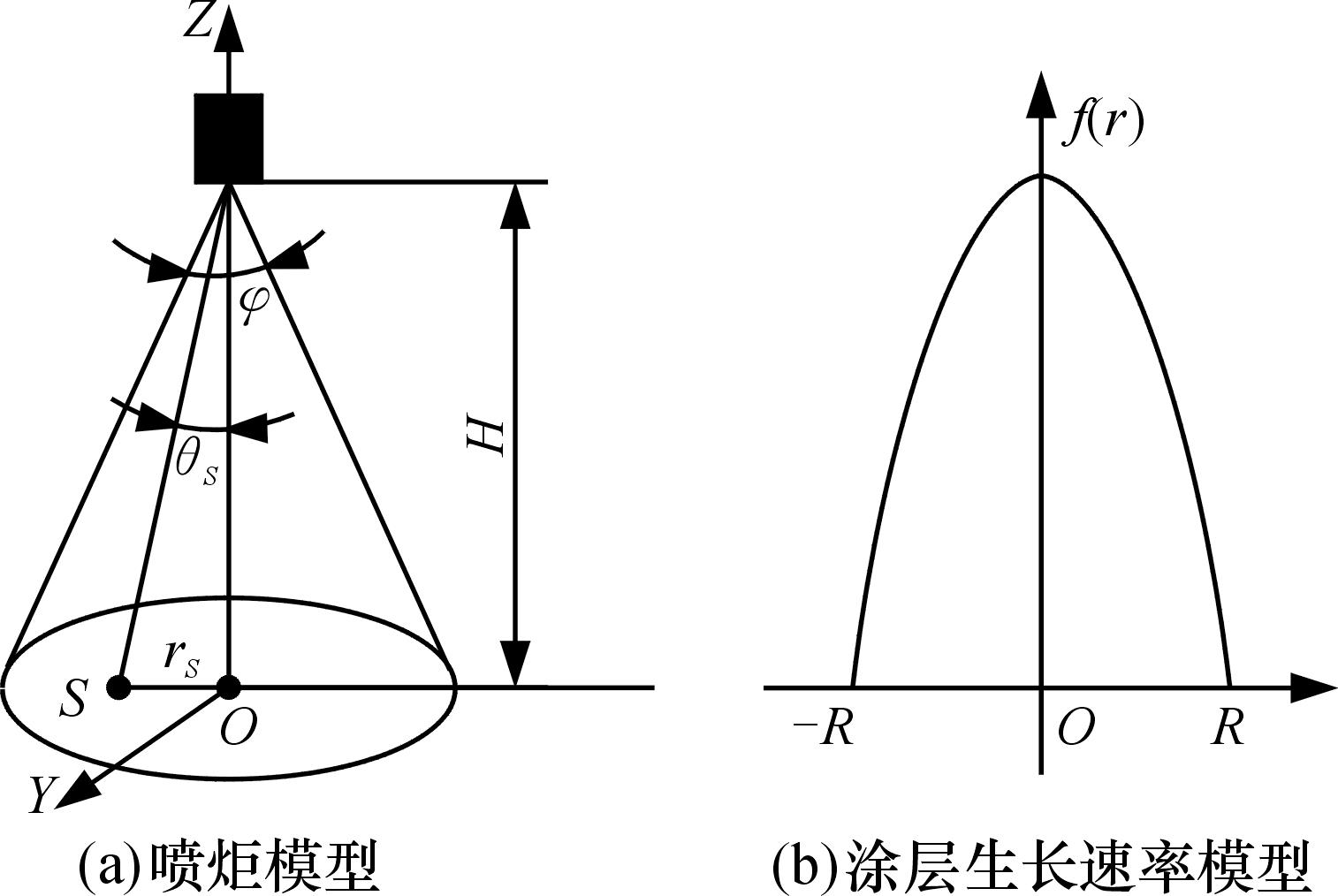
图1 喷炬模型和涂层生长速率模型
Fig.1 Spray plume model and the coating growth rate model
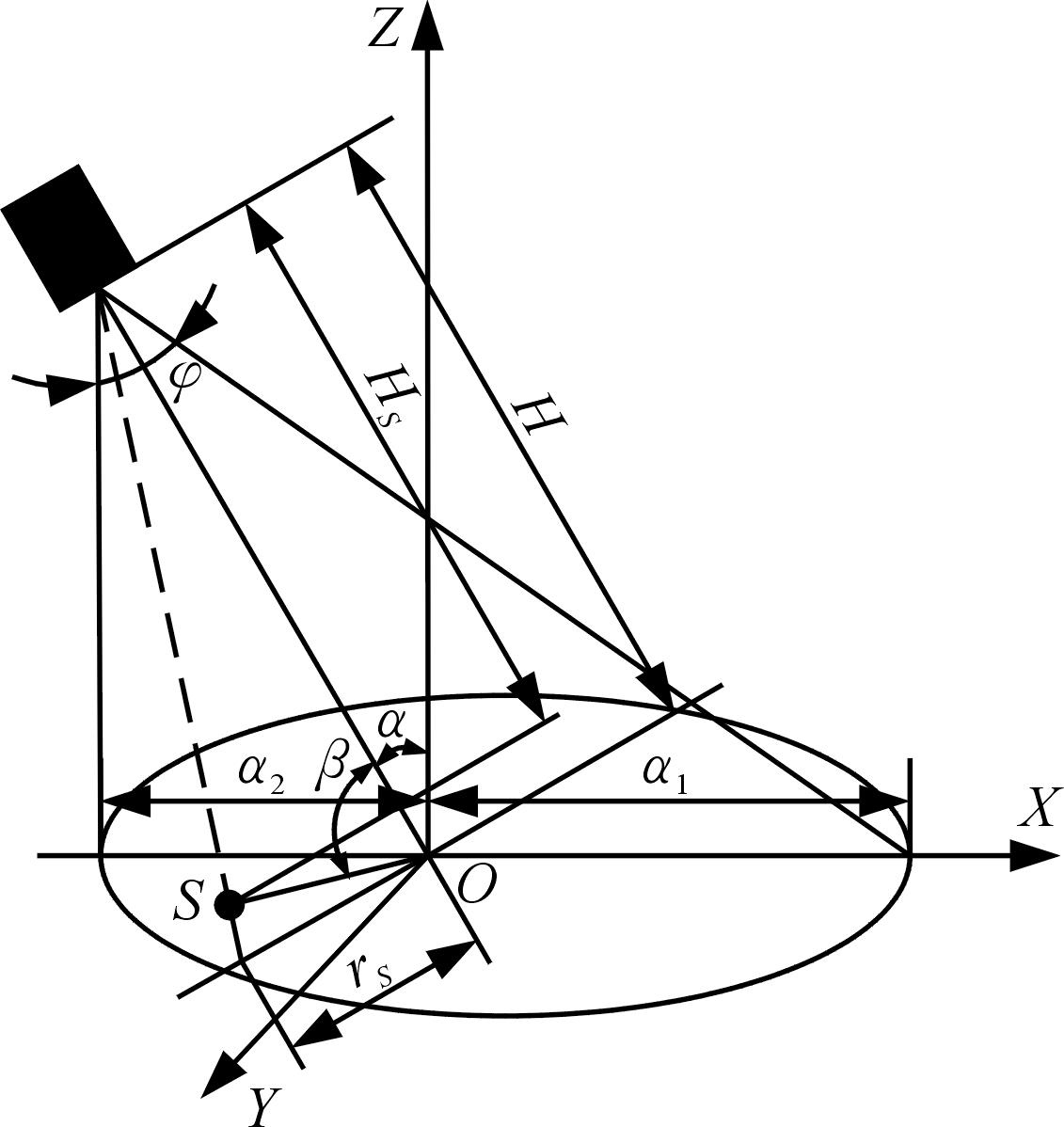
图2 喷枪倾角模型计算示意图
Fig.2 Schematic diagram of the calculation model for the spray gun inclination angle
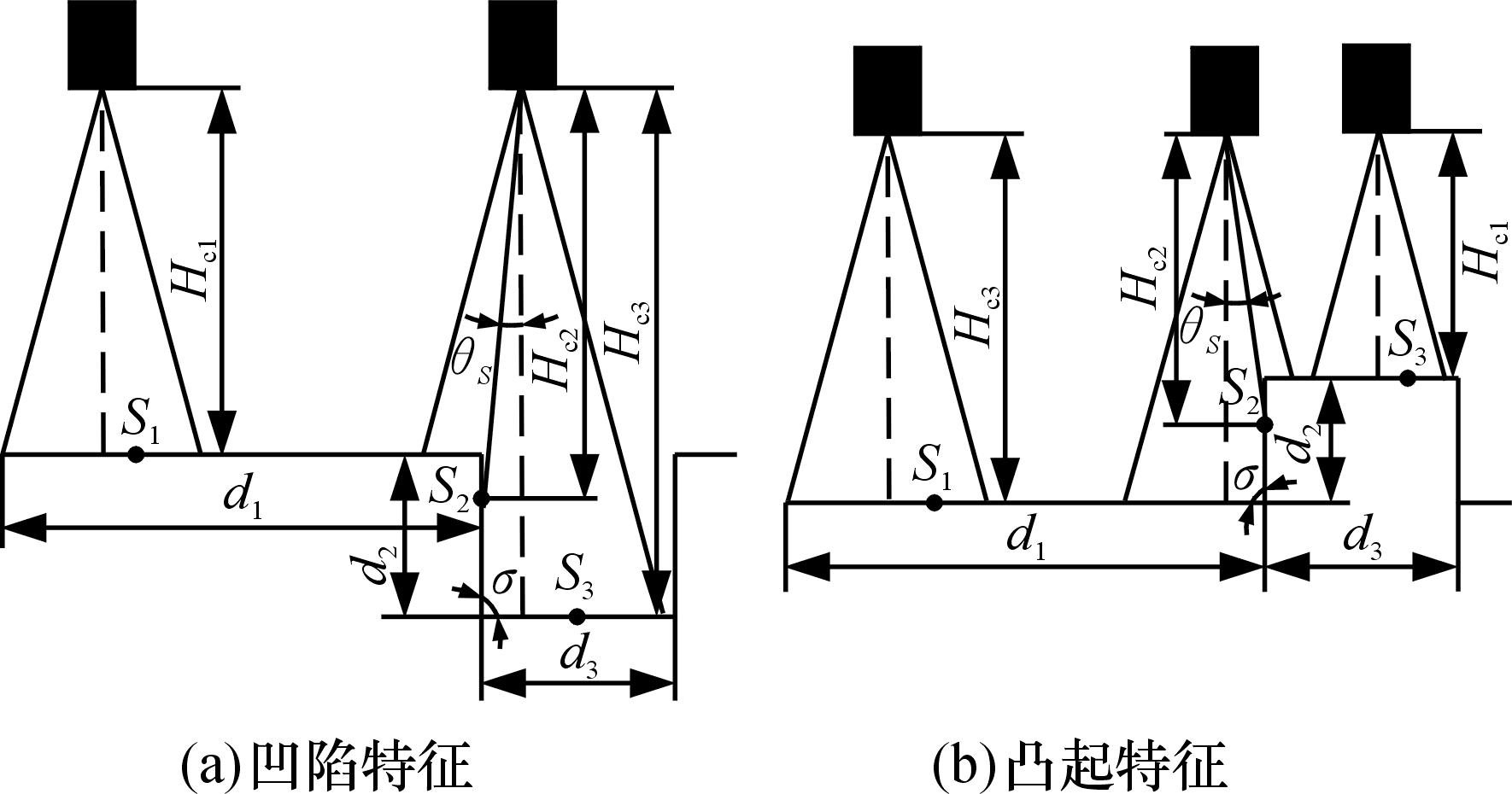
图3 垂直喷涂凸起凹陷特征示意图
Fig.3 Schematic diagram of the protrusion and depression characteristics in vertical spraying
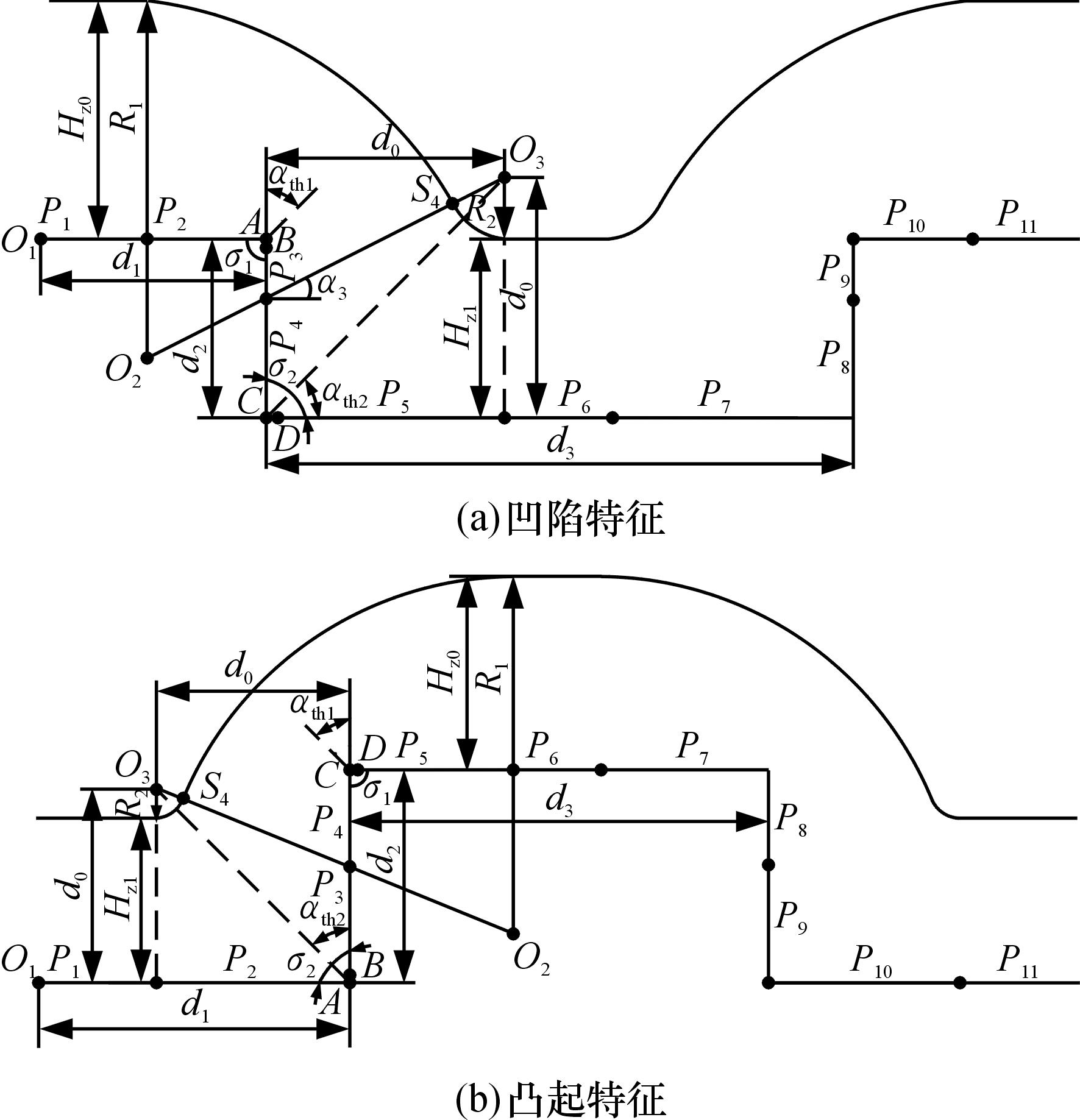
图4 连续变倾角轨迹喷涂复杂特征示意图
Fig.4 Schematic diagram of complex feature spraying with a continuously varying inclination angle trajectory
图5 外犄角喷涂示意图
Fig.5 Schematic diagram of external corner spraying
图6 内犄角喷涂示意图
Fig.6 Schematic diagram of internal corner spraying
图7 外犄角交界处涂层示意图
Fig.7 Schematic diagram of the coating at the junction of external corners
| 凹陷特征 | d2/mm | 40 | 47 | 50 | 60 |
|---|---|---|---|---|---|
| v | 254.1 | 266.4 | 278.2 | 299.2 | |
| 凸起特征 | d2/mm | 50 | 52 | 60 | 70 |
| v | 292.1 | 302.3 | 314.8 | 336.5 |
表1 不同凸起高度、凹陷深度时最优喷涂速度
Tab.1 Optimal spraying velocity at varying protrusion heights and depression depths
| 凹陷特征 | d2/mm | 40 | 47 | 50 | 60 |
|---|---|---|---|---|---|
| v | 254.1 | 266.4 | 278.2 | 299.2 | |
| 凸起特征 | d2/mm | 50 | 52 | 60 | 70 |
| v | 292.1 | 302.3 | 314.8 | 336.5 |
图8 不同凸起高度、凹陷深度对涂层厚度的影响规律
Fig.8 Influence of varying protrusion heights and depression depths on coating thickness
| d2/mm | Hz0/mm | Hz1/mm | R1/mm | R2/mm | v1/ (mm·s-1) | v2/ (mm·s-1) | v3/ (mm·s-1) | v4/ (mm·s-1) | v5/ (mm·s-1) | v6/ (mm·s-1) |
|---|---|---|---|---|---|---|---|---|---|---|
| 47 | 220 | 165 | 231 | 32 | 431.3 | 317.1 | 354.1 | 356.2 | 274.8 | 304.4 |
| 50 | 216 | 162 | 221 | 43 | 398.3 | 309.8 | 343.4 | 309.5 | 246.4 | 294.7 |
| 52 | 213 | 166 | 218 | 24 | 235.1 | 291.3 | 261.5 | 299.6 | 360.4 | 401.2 |
| 60 | 210 | 164 | 216 | 35 | 218.2 | 314.4 | 253.1 | 291.2 | 351.8 | 382.7 |
表2 不同凸起高度、凹陷深度下喷涂轨迹最优喷涂参数
Tab.2 Optimal spraying parameters for spray trajectories at varying protrusion heights and depression depths
| d2/mm | Hz0/mm | Hz1/mm | R1/mm | R2/mm | v1/ (mm·s-1) | v2/ (mm·s-1) | v3/ (mm·s-1) | v4/ (mm·s-1) | v5/ (mm·s-1) | v6/ (mm·s-1) |
|---|---|---|---|---|---|---|---|---|---|---|
| 47 | 220 | 165 | 231 | 32 | 431.3 | 317.1 | 354.1 | 356.2 | 274.8 | 304.4 |
| 50 | 216 | 162 | 221 | 43 | 398.3 | 309.8 | 343.4 | 309.5 | 246.4 | 294.7 |
| 52 | 213 | 166 | 218 | 24 | 235.1 | 291.3 | 261.5 | 299.6 | 360.4 | 401.2 |
| 60 | 210 | 164 | 216 | 35 | 218.2 | 314.4 | 253.1 | 291.2 | 351.8 | 382.7 |
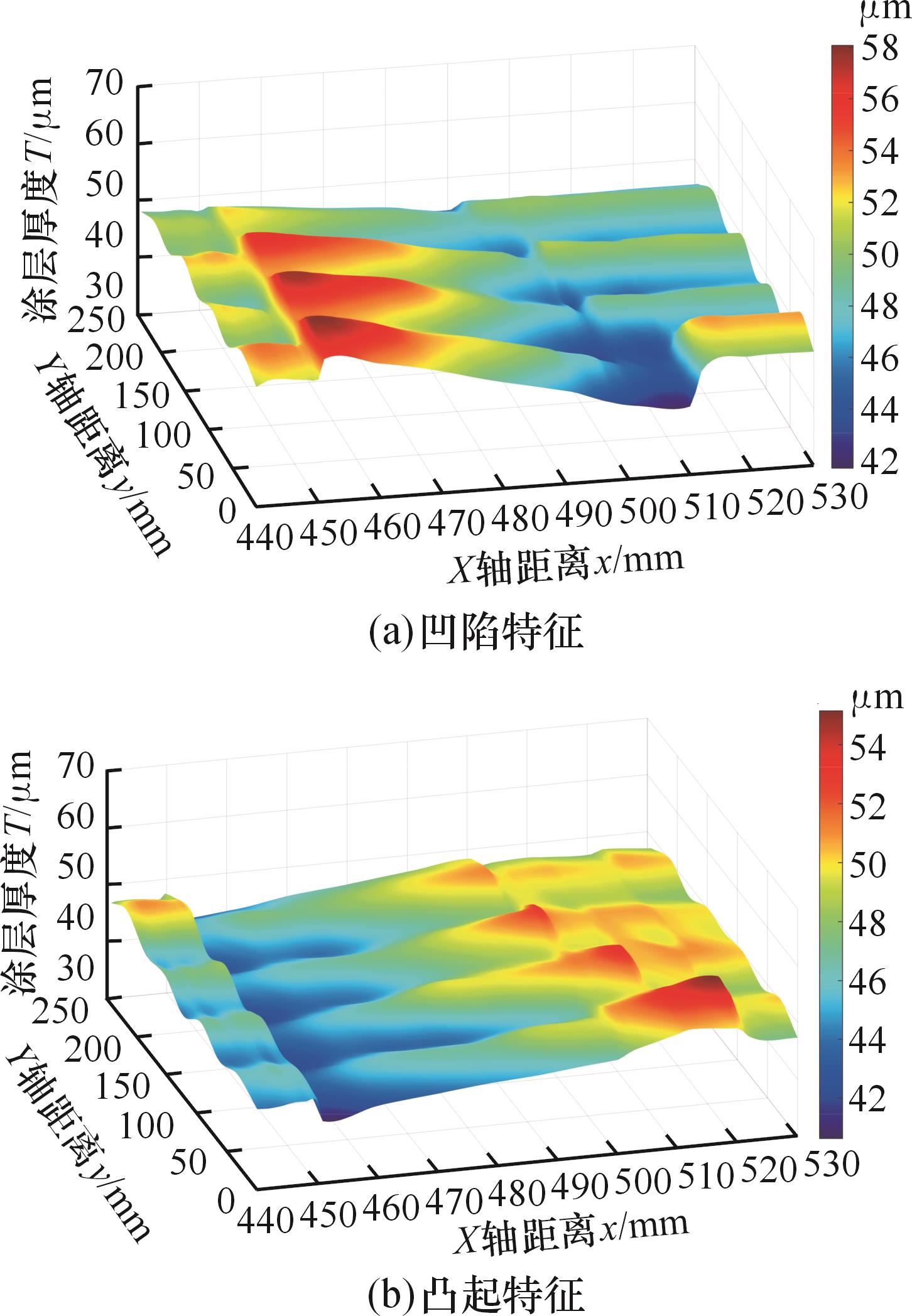
图9 优化后的涂层厚度分布
Fig.9 Optimized coating thickness distribution
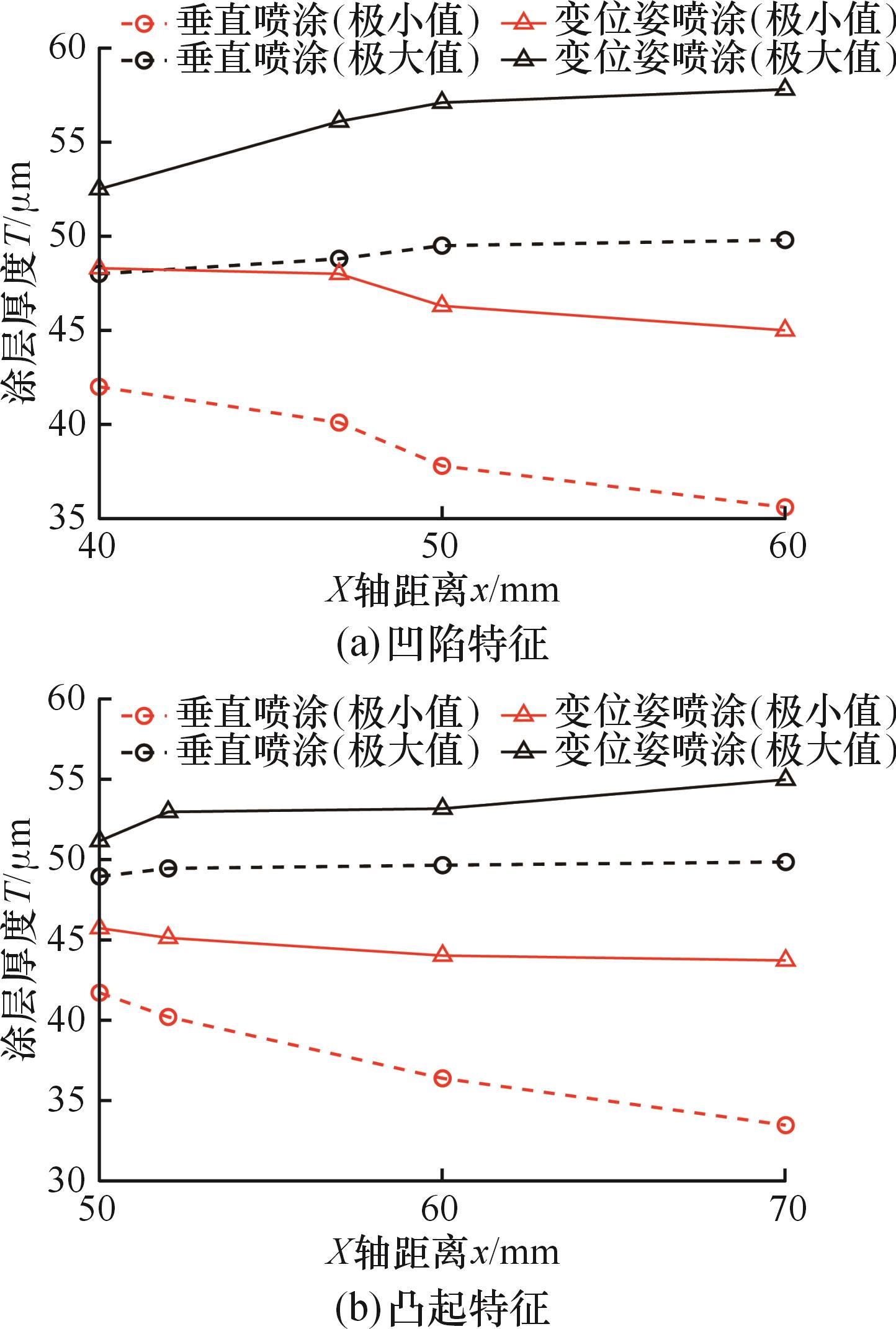
图10 垂直和变位姿喷涂对最小/最大涂层厚度的影响
Fig.10 Effects of vertical and positional variation spraying on minimum and maximum coating thickness
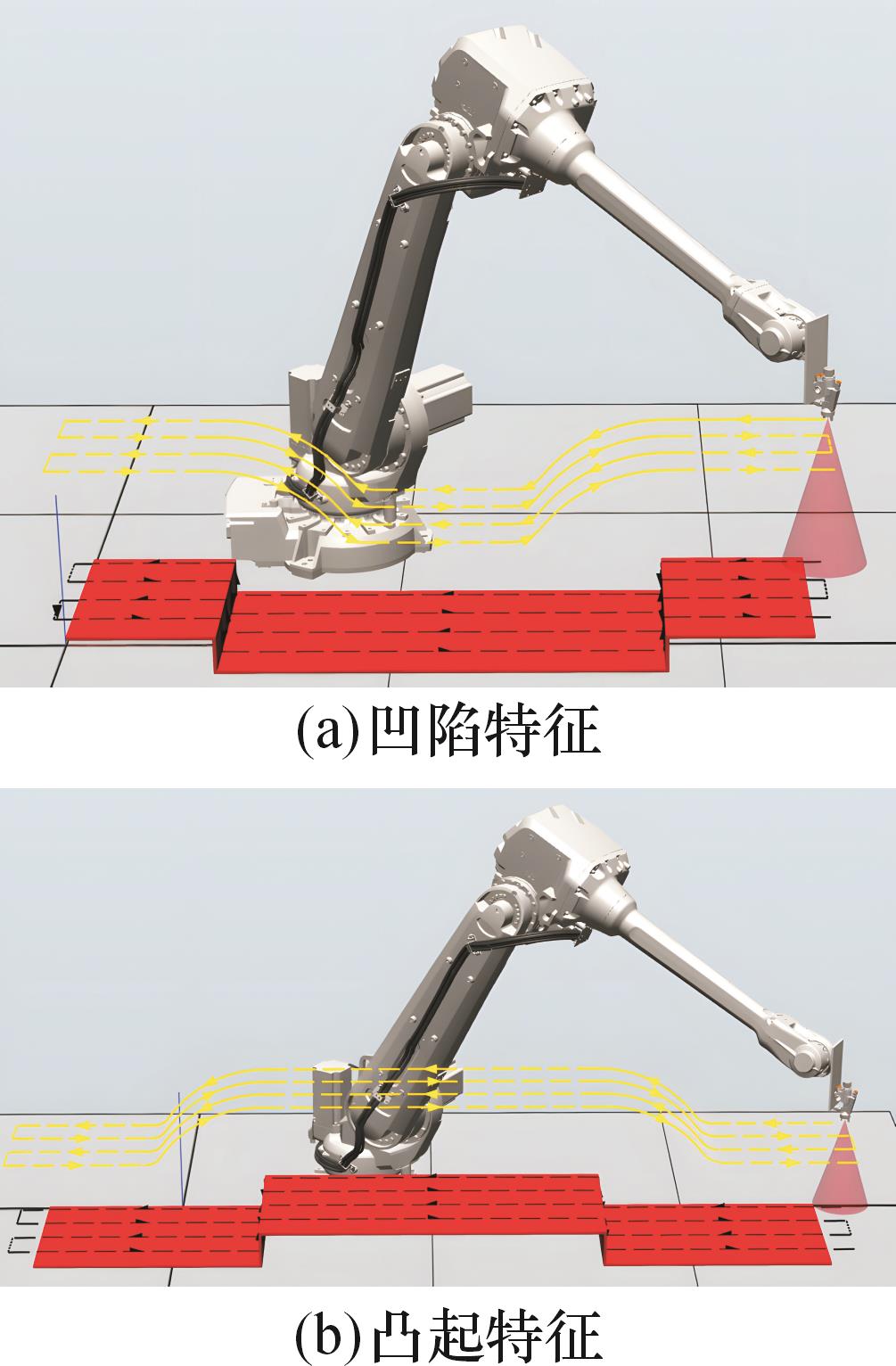
图11 机器人空间喷涂轨迹示意图
Fig.11 Schematic diagram of robotic spatial spraying trajectory

图12 板材喷涂实验
Fig.12 Spraying experiments on sheet materials
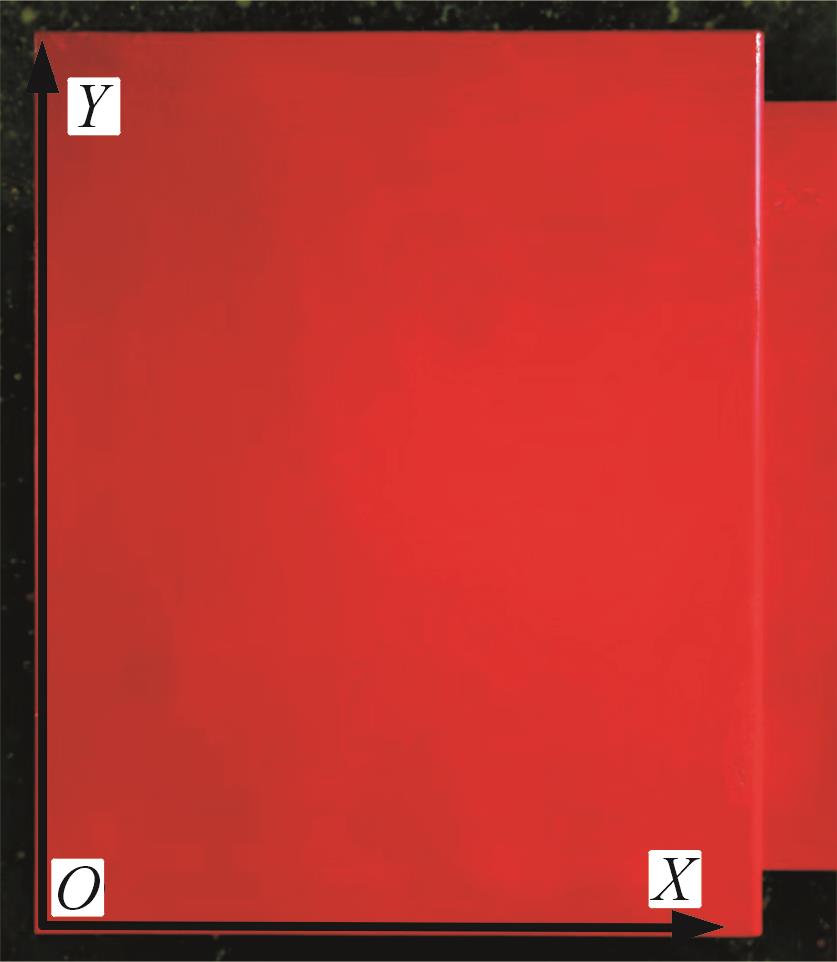
图13 板材涂层厚度测量
Fig.13 Measurement of coating thickness on sheet materials
| 实验结果 | 凸起特征板材 | 凹陷特征板材 | ||
|---|---|---|---|---|
垂直 喷涂 | 连续变 倾角喷涂 | 垂直 喷涂 | 连续变 倾角喷涂 | |
| 满足膜厚精度要求的区域占比/% | 86.1 | 100.0 | 87.5 | 100.0 |
| 平均膜厚/μm | 46.2 | 48.9 | 46.2 | 48.2 |
| 膜厚标准差/μm | 5.3 | 3.2 | 4.7 | 2.7 |
表3 不同轨迹规划方式喷涂实验结果
Tab.3 Spraying experimental results using different trajectory planning methods
| 实验结果 | 凸起特征板材 | 凹陷特征板材 | ||
|---|---|---|---|---|
垂直 喷涂 | 连续变 倾角喷涂 | 垂直 喷涂 | 连续变 倾角喷涂 | |
| 满足膜厚精度要求的区域占比/% | 86.1 | 100.0 | 87.5 | 100.0 |
| 平均膜厚/μm | 46.2 | 48.9 | 46.2 | 48.2 |
| 膜厚标准差/μm | 5.3 | 3.2 | 4.7 | 2.7 |
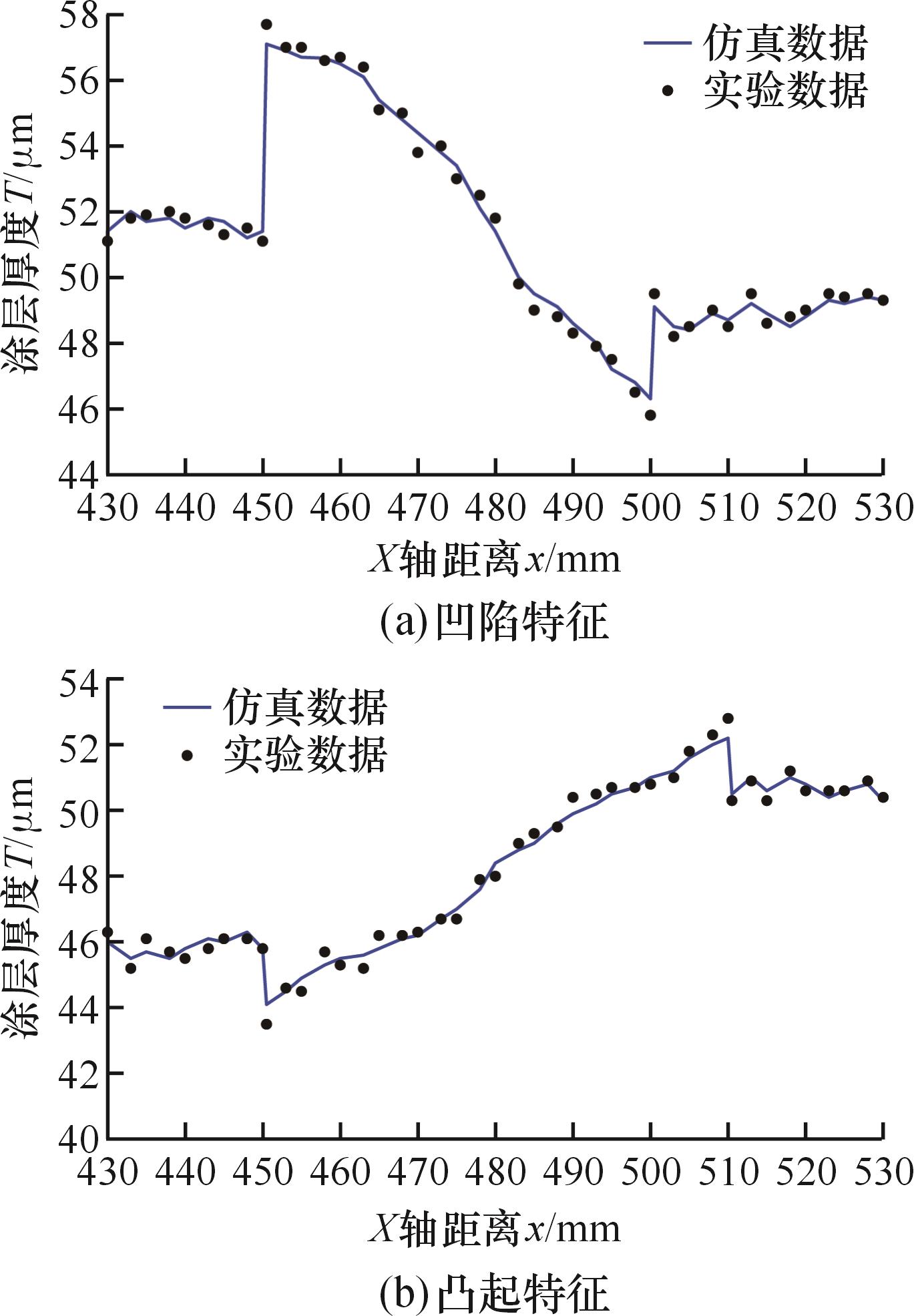
图14 喷涂实验和仿真研究的涂层厚度对比图
Fig.14 Comparison of coating thickness between spraying experiments and simulation studies
| [1] | 王秋爽,钟羽中,郭斌,等.基于改进OMP算法的喷涂机器人轨迹规划研究[J].现代制造工程,2021(12):28-34. |
| WANG Qiushuang, ZHONG Yuzhong, GUO Bin, et al. Research on Trajectory Planning of Spraying Robot Based on Improved OMP Algorithm[J]. Modern Manufacturing Engineering,2021(12):28-34. | |
| [2] | 卢晓冬,唐倩,蒋敏,等.基于遗传算法的双层喷涂自动轨迹规划[J].计算机集成制造系统,2018,24(9): 2157-2167. |
| LU Xiaodong, TANG Qian, JIANG Min, et al. Automated Robot Trajectory Planning for Double-layer Spray Painting Based on Genetic Algorithm[J]. Computer Integrated Manufacturing Systems,2018, 24(9):2157-2167. | |
| [3] | CHEN Heping, XI Ning. Automated Robot Tool Trajectory Connection for Spray Forming Process[J]. Journal of Manufacturing Science and Engineering, 2012, 134(2): 021017. |
| [4] | 齐淑林,郑权,赵晨辉,等.基于涂层厚度模型的机器人喷涂轨迹规划研究[J].机床与液压,2023,51(15):88-94. |
| QI Shulin, ZHENG Quan, ZHAO Chenhui, et al. Research on Trajectory Planning of Spraying Robot Based on Coating Thickness Model[J]. Machine Tool & Hydraulics, 2023, 51(15): 88-94. | |
| [5] | DANIEL G, STEFAN J, RAAD S, et al. Generating Optimized Trajectories for Robotic Spray Painting[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(3): 1380-1391. |
| [6] | IBRAHIM Z, RAHIM R A, ARIFFADILLAH S, et al. Parameter Settings for an Automated Gantry-robot Painting System Using a 3-Gun Atomization Spray Method for an Anti-static Coating Process[J]. American Journal of Engineering and Applied Sciences, 2019, 12(4): 508-524. |
| [7] | 胡小才,陈铮,吴彪,等.船舱狭窄封闭空间喷涂机器人结构设计与自动喷涂流程[J].机械设计与研究,2023,39(4):21-26. |
| HU Xiaocai, CHEN Zheng, WU Biao, et al. Design and Automatic Operation Planning of Cabin Spraying Robot System[J]. Machine Design and Research, 2023, 39(4): 21-26. | |
| [8] | LIU Yi, ZENG Yong, ZHAO Xueya, et al. Analysis of Film Forming Law and Characteristics for an Air Static Spray with a Variable Position of the Plane[J]. Coatings, 2021, 11(10): 1236. |
| [9] | 刘亚军,訾斌,王正雨,等.智能喷涂机器人关键技术研究现状及进展[J].机械工程学报,2022,58(7):53-74. |
| LIU Yajun, ZI Bin, WANG Zhengyu, et al. Research Progress and Trend of Key Technology of Intelligent Spraying Robot[J]. Journal of Mechanical Engineering, 2022,58(7):53-74. | |
| [10] | CAI Zhenhua, LIANG Hong, QUAN Shuhai, et al. Computer-aided Robot Trajectory Auto-generation Strategy in Thermal Spraying[J]. Journal of Thermal Spray Technology, 2015, 24(7): 1235-1245. |
| [11] | FANG Dandan, ZHENG You, ZHANG Botao, et al. Automatic Robot Trajectory for Thermal-sprayed Complex Surfaces[J]. Advances in Materials Science and Engineering, 2018: 1-11. |
| [12] | ZHOU Y Z, MA S M, LI A P, et al. Path Planning for Spray Painting Robot of Horns Surfaces in Ship Manufacturing[J]. IOP Conference Series: Materials Science and Engineering, 2019, 521: 47-52. |
| [13] | CHEN Wei, LIU Junjie, TANG Yang, et al. Trajectory Optimization of Spray Painting Robot for Complex Curved Surface Based on Exponential Mean Bezier Method[J]. Mathematical Problems in Engineering, 2017,11: 1-10. |
| [14] | NIETO B S, LIN C Y. Autonomous Trajectory Planning for Spray Painting on Complex Surfaces Based on a Point Cloud Model[J]. Sensors, 2023, 23(24): 9634. |
| [15] | 马淑梅,罗曦,李爱平,等.船舶工业机器人曲面喷涂喷枪轨迹离线规划[J].同济大学学报(自然科学版), 2017,45(2):289-295. |
| MA Shumei, LUO Xi, LI Aiping, et al. Offline Trajectory Planning on Curved Surface for Spray Painting Robot in Shipbuilding Industry[J]. Journal of Tongji University(Natural Science), 2017, 45(2): 289-295. | |
| [16] | 华霄桐,张思敏,刘兴杰,等.基于椭圆双β喷枪模型的喷涂轨迹优化[J].清华大学学报(自然科学版), 2020,60(12):985-992. |
| HUA Xiaotong, ZHANG Simin, LIU Xingjie, et al. Optimization of Spraying Trajectory Based on Elliptical Double β Spraying Gun Model[J]. Journal of Tsinghua University(Science and Technology), 2020, 60(12): 985-992. | |
| [17] | GUAN Liwen, CHEN Lu. Trajectory Planning Method Based on Transitional Segment Optimization of Spray Painting Robot on Complex-free Surface[J]. Industrial Robot, 2019, 46(1): 31-43. |
| [18] | 张鹏,龚俊,宁会峰,等.面向大曲率组合曲面的喷涂机器人喷枪轨迹组合与连接问题研究[J].四川大学学报(工程科学版),2016,48(4):217-222. |
| ZHANG Peng, GONG Jun, NING Huifeng, et al. Study on Trajectory Combination and Connection Problems of Spray-painting Robot for Large Curvature Combination Surfaces[J]. Journal of Sichuan University(Engineering Science Edition), 2016, 48(4): 217-222. | |
| [19] | 陈洁涛.面向型钢的工业机器人喷涂运动规划[D].广州: 广东工业大学,2021. |
| CHEN Jietao. Spraying Motion Planning of Indust⁃rial Robots for Formed Steels[D]. Guangzhou: Guangdong University of Technology,2021. | |
| [20] | 许勇,王义灿,王春燕,等.阀体喷涂机器人运动学分析及能效匹配设计[J].上海交通大学学报,2016,50(7):1108-1113. |
| XU Yong, WANG Yican, WANG Chunyan, et al. Kinematic Analysis and Capacity-efficiency Matching Design of a Valve Spraying Robot[J]. Journal of Shanghai Jiao Tong University, 2016,50(7): 1108-1113. | |
| [21] | CHEN Heping, XI Ning. Automated Tool Trajectory Planning of Industrial Robots for Painting Composite Surfaces[J]. International Journal of Advanced Manufacturing Technology, 2008, 35(7/8): 680-696. |
| [22] | ZENG Yong, CHEN Yang, ZHANG Yakun, et al. Spraying Trajectory Planning for Outer-horn Surface with Two Patches Based on Continuous Varied Dip-angle[J]. International Journal of Robotics and Automation, 2018, 33(4): 346-354. |
| [23] | ZENG Yong, ZHANG Yakun, HE Junxue, et al. Prediction Model of Coating Growth Rate for Varied Dip-angle Spraying Based on Gaussian Sum Model[J]. Mathematical Problems in Engineering, 2016:1-7. |
| [24] | 曾勇,于永庆,刘毅,等.不规则平面边界约束喷涂轨迹参数优化[J].机械科学与技术,2020,39(6):904-909. |
| ZENG Yong, YU Yongqing, LIU Yi, et al. Para⁃meter Optimization of Boundary-constrained Spray Trajectory for Irregular Plane[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(6): 904-909. | |
| [25] | 陈岁繁,林佳伦.圆柱工件变锯深工况下恒定锯切力约束多目标进给速度优化方法[J].机床与液压,2023, 51(22):72-79. |
| CHEN Suifan, Lin Jialun. Multi-objective Feed Rate Optimization Method with Constant Sawing Force Constraint under Variable Sawing Depth for Cylindrical Workpiece[J]. Machine Tool & Hydraulics, 2023, 51(22): 72-79. |
| [1] | 韩飞燕, 顾志成, 赵一鹏, 张传伟. 基于参数映射的叶轮粗加工椭圆摆线轨迹优化[J]. 中国机械工程, 2024, 35(03): 438-444,456. |
| [2] | 陈杰;董伟;盛鑫军;朱向阳. 基于螺旋样条的旋翼无人机区域轨迹规划[J]. 中国机械工程, 2019, 30(12): 1453-1459. |
| [3] | 刘洋;赵臣;王旭浩;张佳俊. 喷涂机器人静电旋杯的新模型[J]. 中国机械工程, 2019, 30(06): 709-715. |
| [4] | 董甲甲;王太勇;董靖川;张永宾;陶浩. 改进B样条曲线应用于6R机器人轨迹优化[J]. 中国机械工程, 2018, 29(02): 193-200. |
| [5] | 曾勇, 龚俊, 许宁, 郑, 雷, 赵世田. 喷涂机器人路径组合优化中喷枪轨迹参数的修正方法[J]. 中国机械工程, 2014, 25(6): 836-841. |
| [6] | 史晓帆, 高霖, 徐岩, 张其龙, 孟磊. 自阻电加热渐进成形轨迹优化方法及应用[J]. 中国机械工程, 2013, 24(08): 1122-1126. |
| [7] | 曾勇, 龚俊. 面向自然二次曲面的喷涂机器人喷枪轨迹优化 [J]. 中国机械工程, 2011, 22(3): 282-290. |
| [8] | 郭光立. 不规则曲面半精加工刀具轨迹优化算法 [J]. 中国机械工程, 2011, 22(24): 2914-2917. |
| [9] | 陈伟1, 2, 赵德安1, 梁震2. 喷涂机器人的喷枪轨迹优化设计与实验 [J]. 中国机械工程, 2011, 22(17): 2104-2108. |
| [10] | 曾勇, 龚俊, 陆保印. 面向直纹曲面的喷涂机器人喷枪轨迹优化 [J]. 中国机械工程, 2010, 21(17): 2083-2089. |
| [11] | 赵德安;陈伟;汤养. 基于遗传算法的喷涂机器人喷枪路径规划[J]. J4, 2008, 19(7): 0-881. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||