


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (10): 2274-2283.DOI: 10.3969/j.issn.1004-132X.2025.10.014
杨亮亮( ), 陈泓, 鲁文其
), 陈泓, 鲁文其
收稿日期:2024-09-25
出版日期:2025-10-25
发布日期:2025-11-05
通讯作者:
杨亮亮
作者简介:杨亮亮*(通信作者),男,1978年生,副教授。研究方向为高速高精运动控制。E-mail:yangliangliang@zstu.edu.cn。
基金资助:
Liangliang YANG(), Hong CHEN, Wenqi LU
Received:2024-09-25
Online:2025-10-25
Published:2025-11-05
Contact:
Liangliang YANG
摘要:
中图分类号:
杨亮亮, 陈泓, 鲁文其. 执行器约束下基于轨迹学习的核正则化最优迭代学习控制[J]. 中国机械工程, 2025, 36(10): 2274-2283.
Liangliang YANG, Hong CHEN, Wenqi LU. Kernel Regularization Optimal Iterative Learning Control Based on Trajectory Learning under Actuator Constraints[J]. China Mechanical Engineering, 2025, 36(10): 2274-2283.

图1 伺服系统控制框图
Fig.1 Control block diagram of the servo system
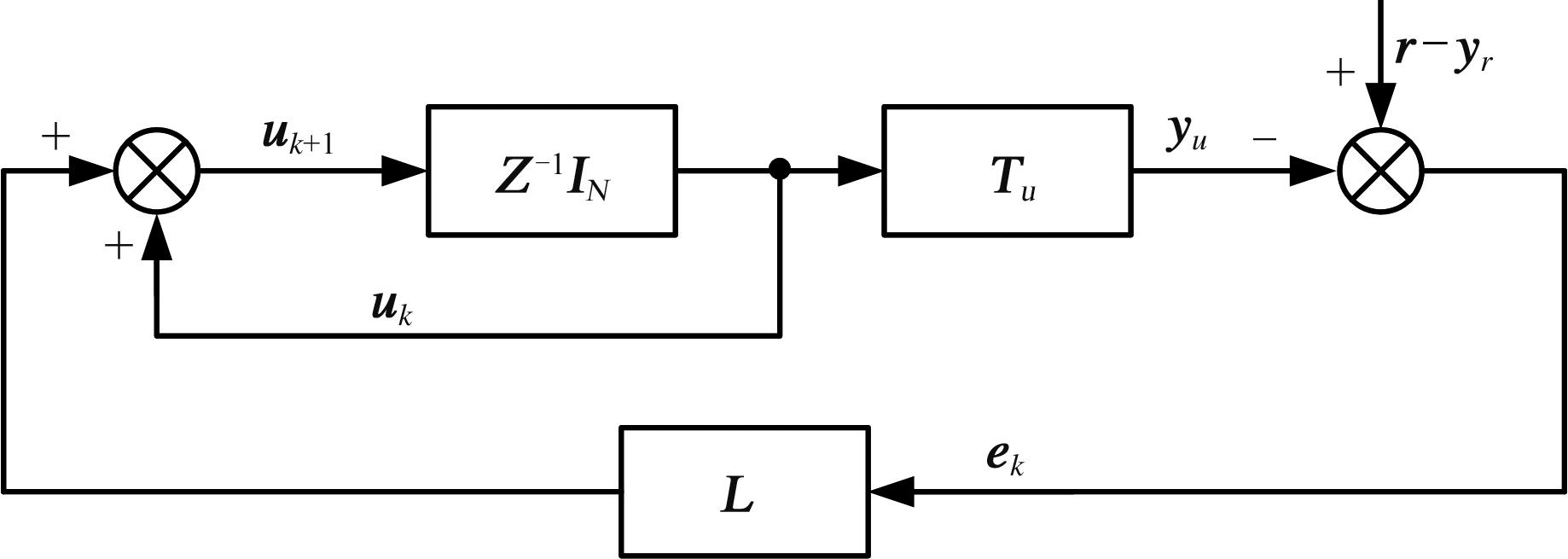
图2 迭代学习控制框图
Fig.2 Block diagram of ILC
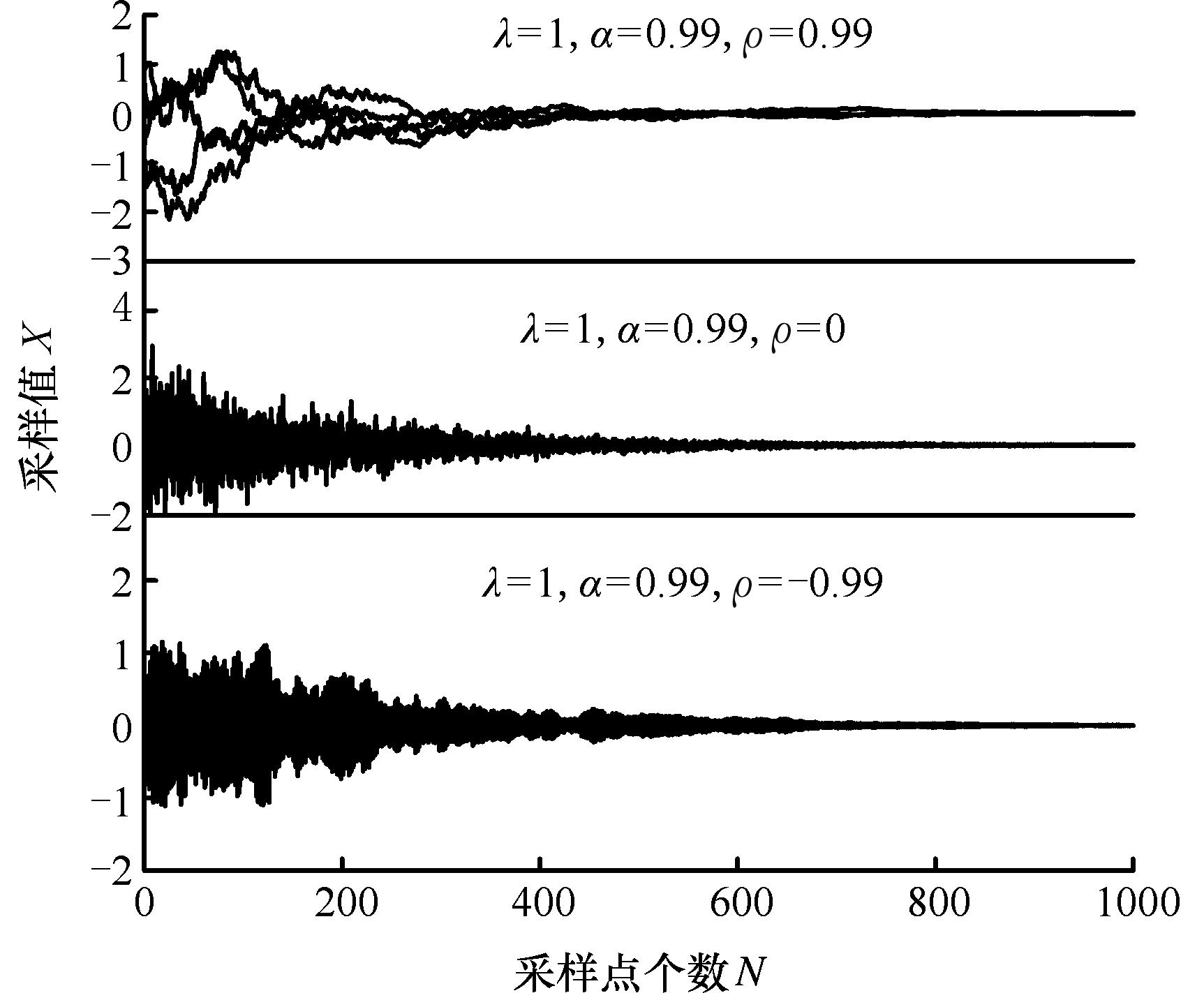
图3 DC核的零均值高斯过程实现
Fig.3 Zero-mean GPR with DC kernel
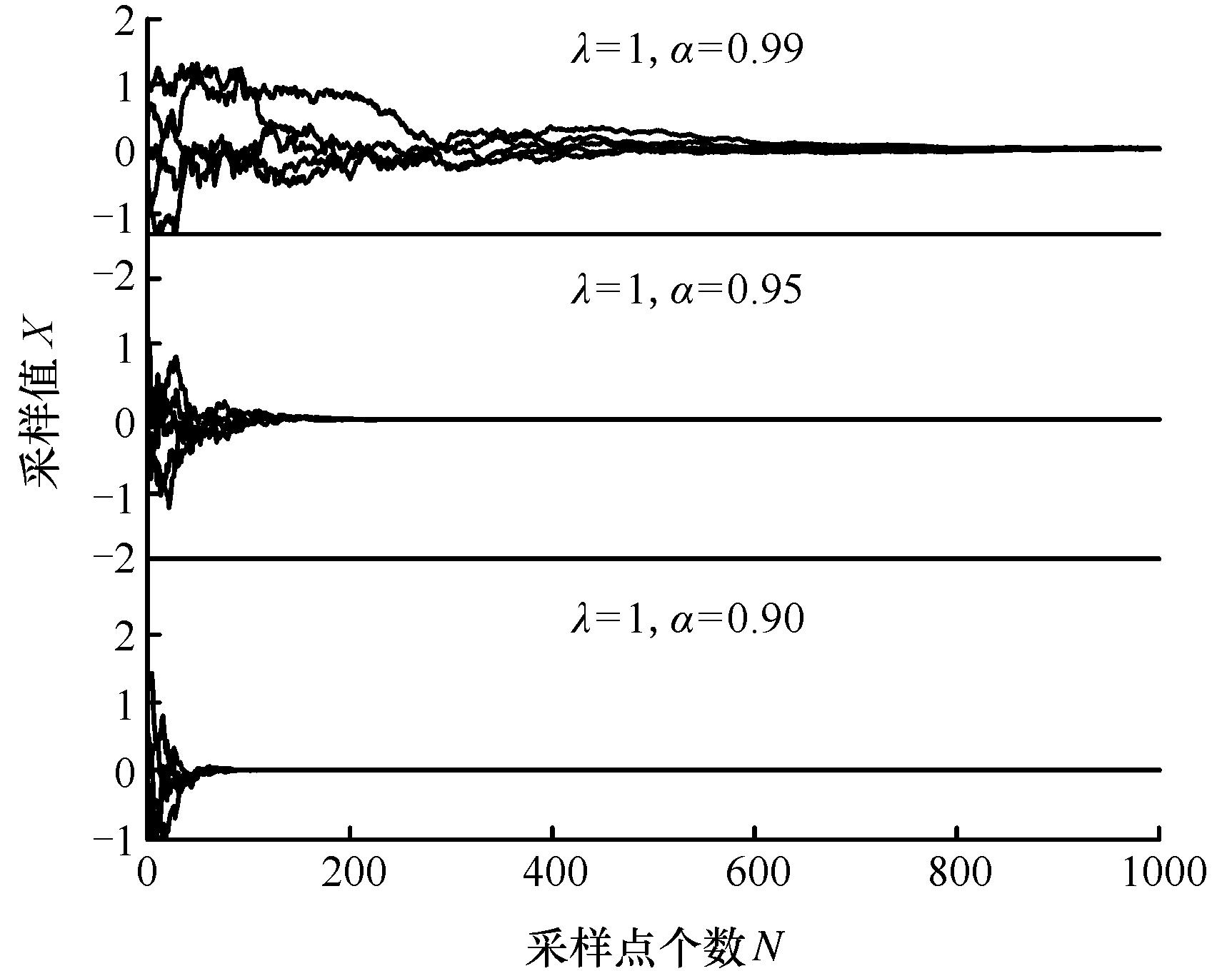
图4 TC核的零均值高斯过程实现
Fig.4 Zero-mean GPR with TC kernel
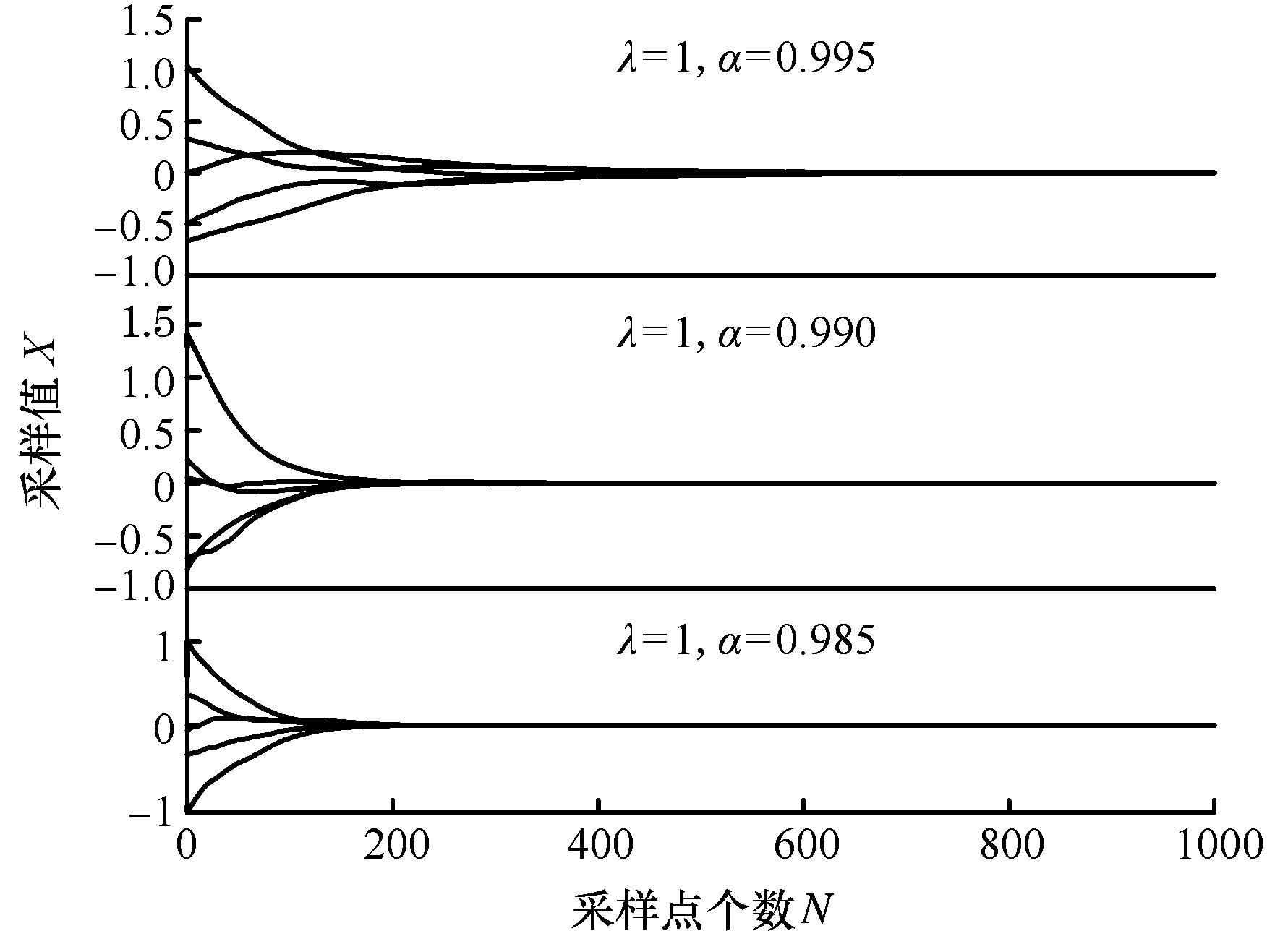
图5 SS核的零均值高斯过程实现
Fig.5 Zero-mean GPR with SS kernel
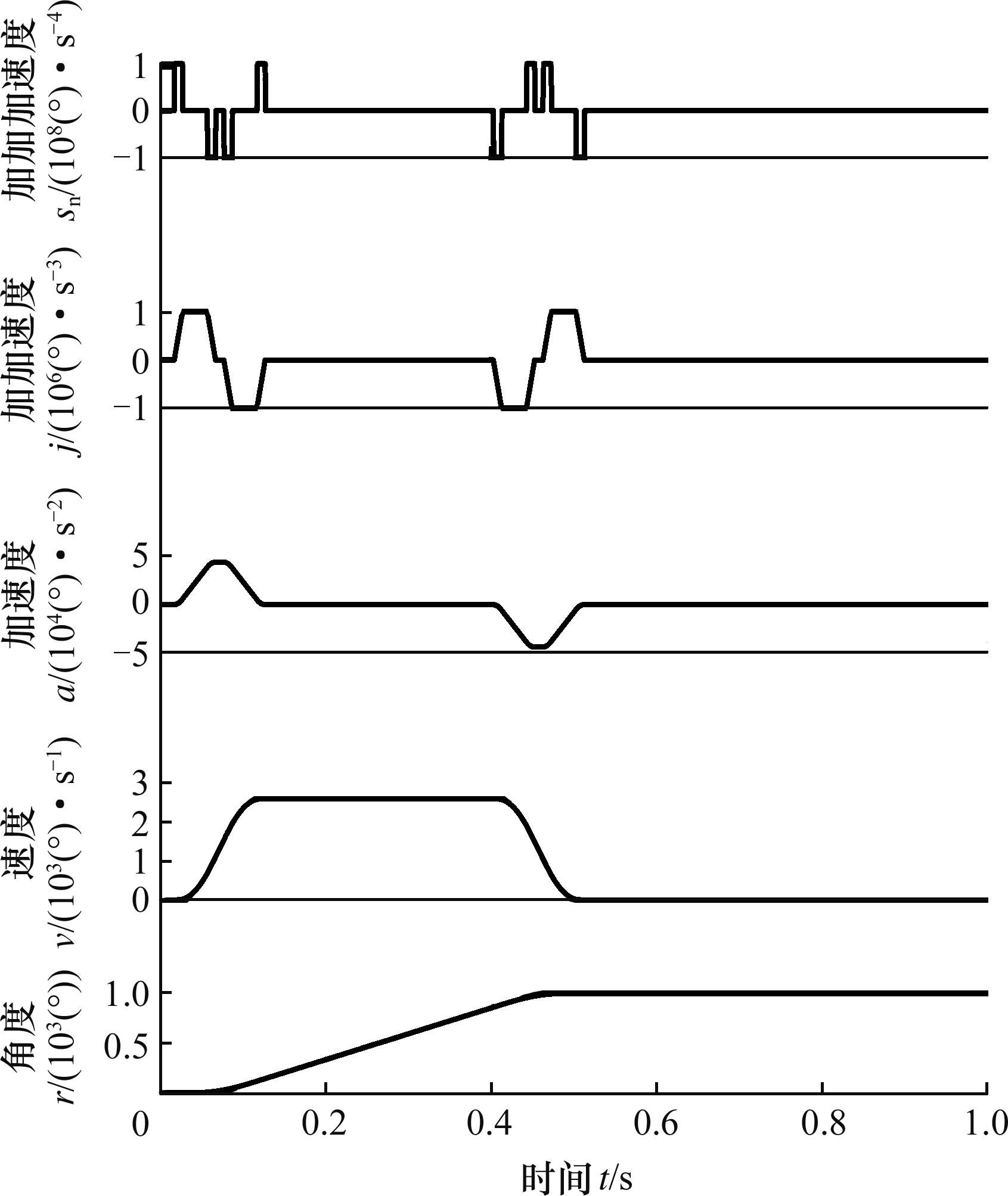
图6 四阶S型点到点轨迹
Fig.6 Fourth-order S-curve point-to-point trajectory
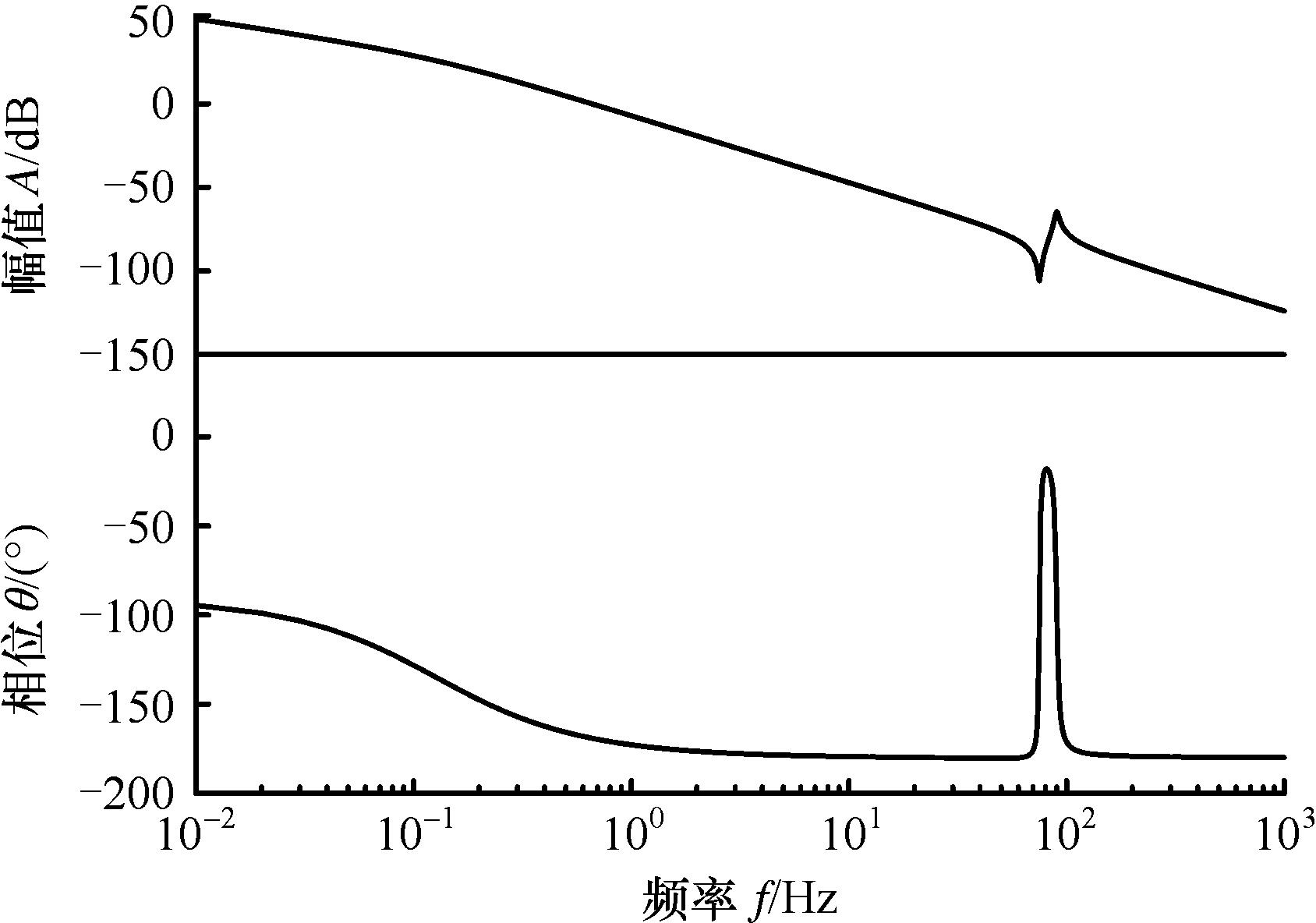
图7 仿真对象伯德图
Fig.7 Bode plot of simulation model
| DDOILC | KROILC | |||
|---|---|---|---|---|
| DC | TC | SS | ||
| MSE | ||||
| FIT | ||||
表 1 辨识效果对比
Tab.1 Comparison of identification performance
| DDOILC | KROILC | |||
|---|---|---|---|---|
| DC | TC | SS | ||
| MSE | ||||
| FIT | ||||
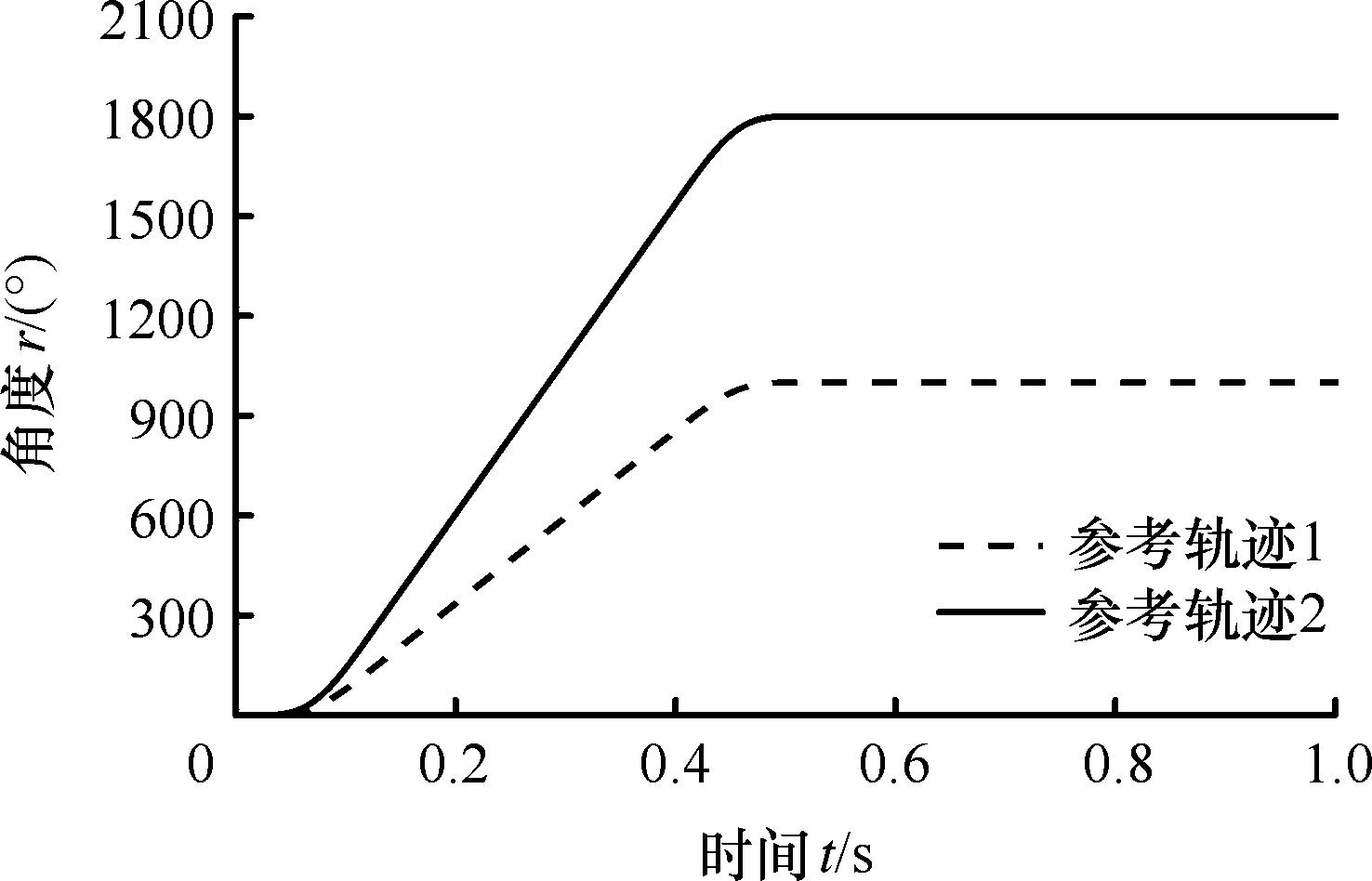
图 8 参考轨迹1和参考轨迹2
Fig.8 Reference trajectory 1 and reference trajectory 2
| vmax | amax | ||
|---|---|---|---|
| 轨迹1 | 1000° | 2590.7°/s | 43177.9°/s2 |
| 轨迹2 | 1800° | 4663.2°/s | 77720.2°/s2 |
| 变化率 | 80% | 80% | 80% |
表2 轨迹参数变化程度
Tab.2 Degree of trajectory parameter variation
| vmax | amax | ||
|---|---|---|---|
| 轨迹1 | 1000° | 2590.7°/s | 43177.9°/s2 |
| 轨迹2 | 1800° | 4663.2°/s | 77720.2°/s2 |
| 变化率 | 80% | 80% | 80% |
| 前馈信号加权系数 | 最大控制信号/ |
|---|---|
| 46.11 | |
| 45.85 | |
| 42.88 |
表3 η = 2×10-7时不同 ω 下的最大控制信号
Tab.3 The maximum control signal under different ω when η = 2×10-7
| 前馈信号加权系数 | 最大控制信号/ |
|---|---|
| 46.11 | |
| 45.85 | |
| 42.88 |
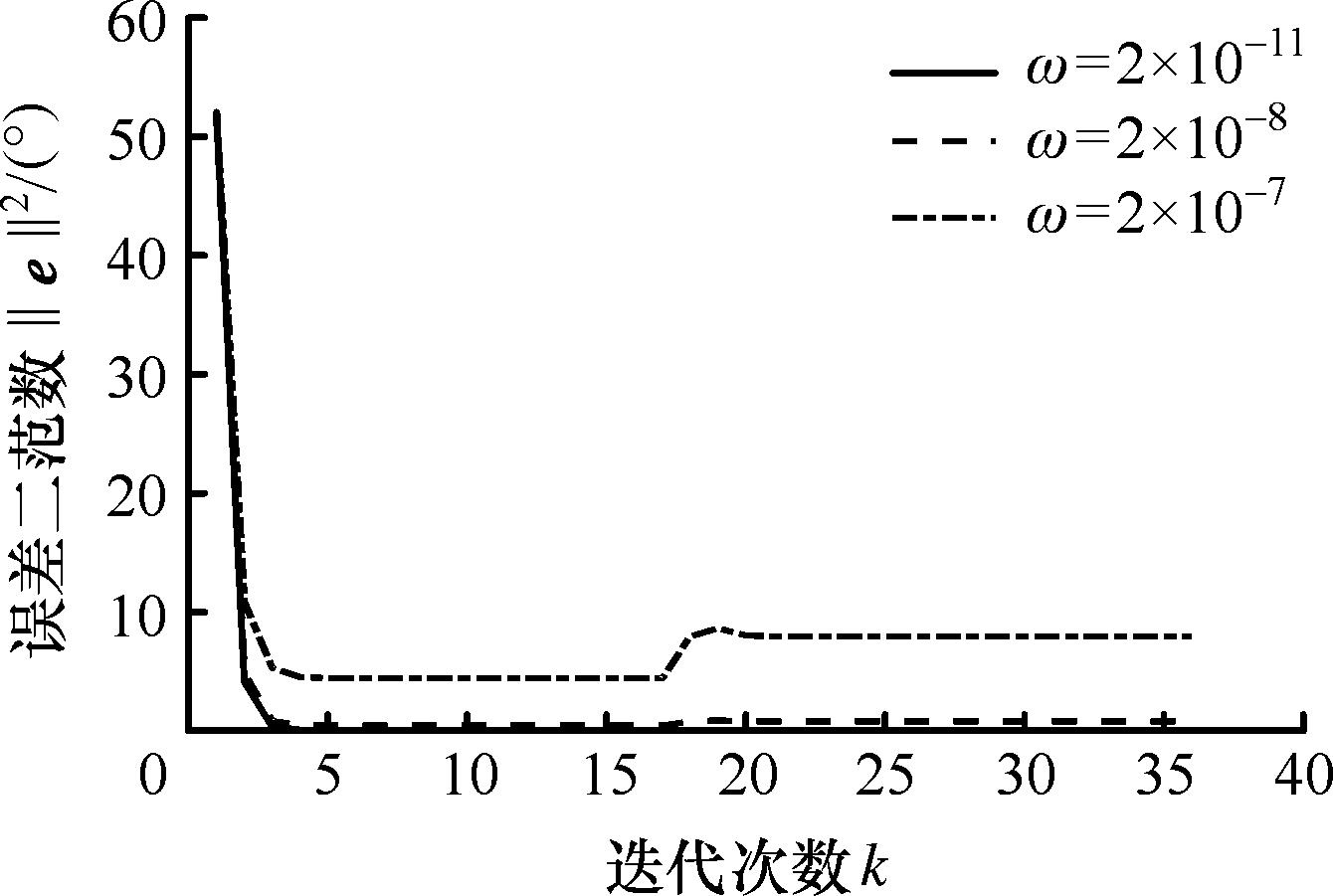
图9 η = 2×10-7时不同 ω 对误差二范数的影响
Fig.9 The influence of different ω on the 2-norm of the error when η = 2×10-7
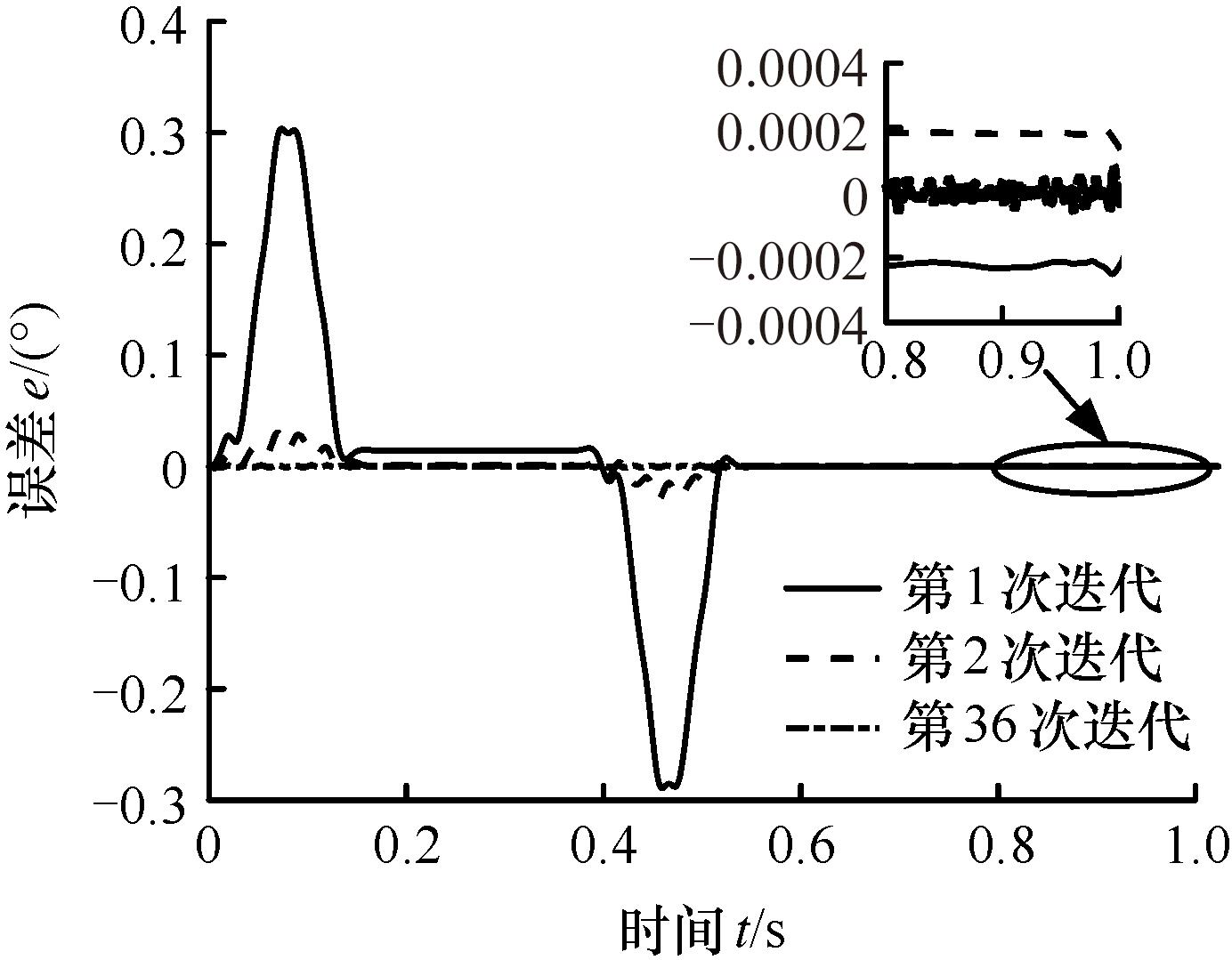
图10 ω = 2×10-11、 η = 2×10-7时全轨迹迭代误差曲线
Fig.10 Full trajectory iterative error curve when ω = 2×10-11, η = 2×10-7
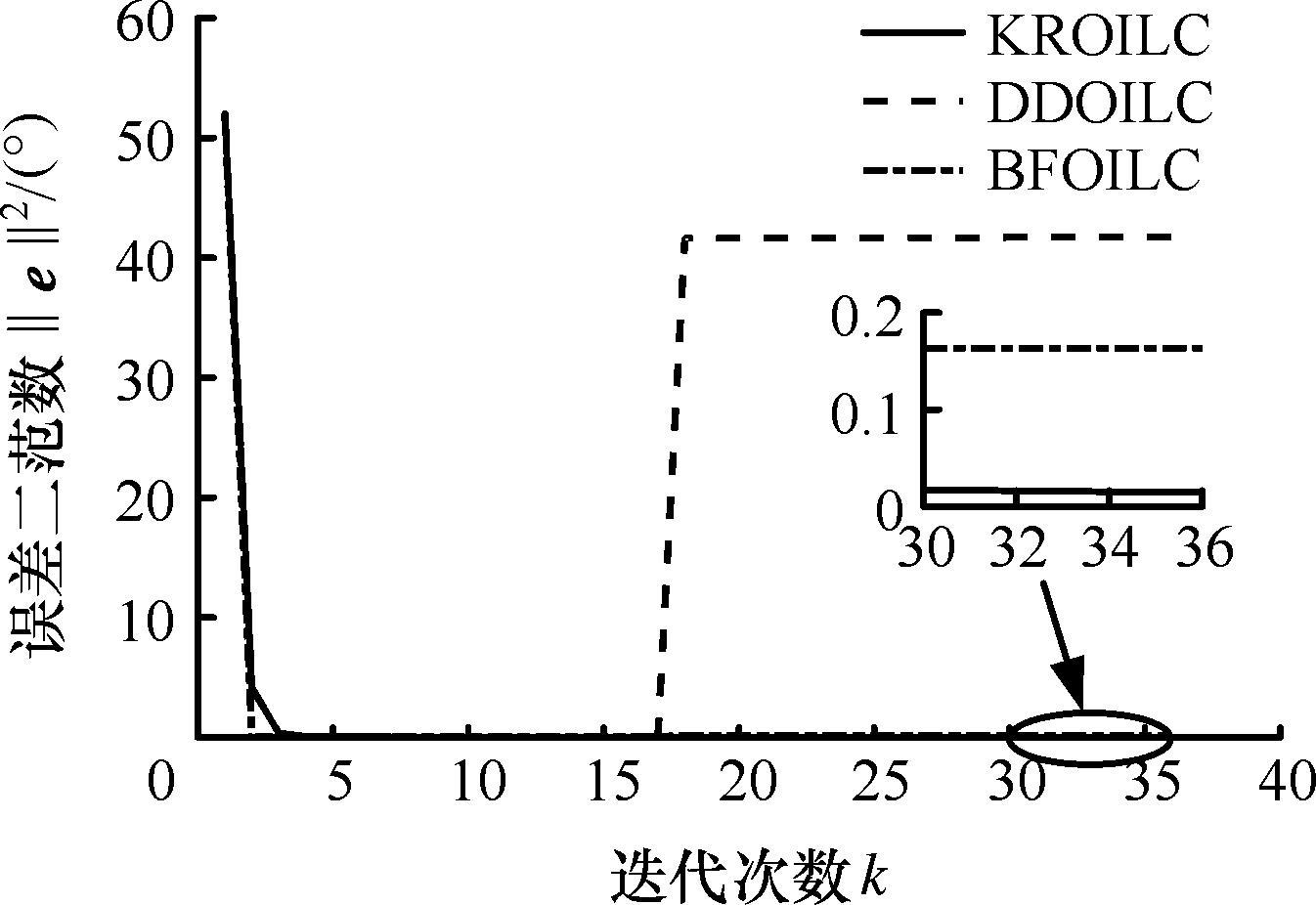
图11 非重复性轨迹仿真中三种算法的误差二范数
Fig.11 The 2-norm of the error for three algorithms in non-repetitive trajectory simulation
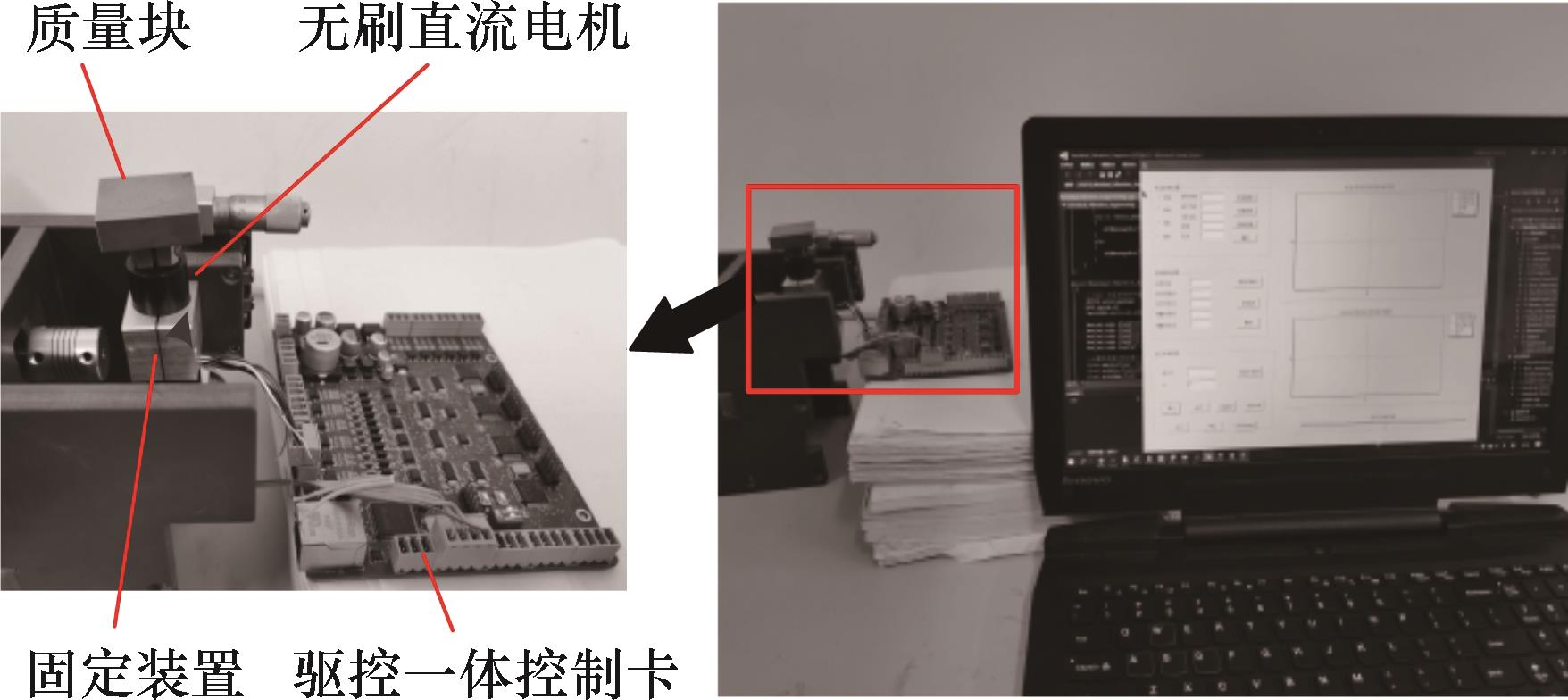
图12 无刷直流电机实验平台
Fig.12 Brushless direct current motor experimental platform
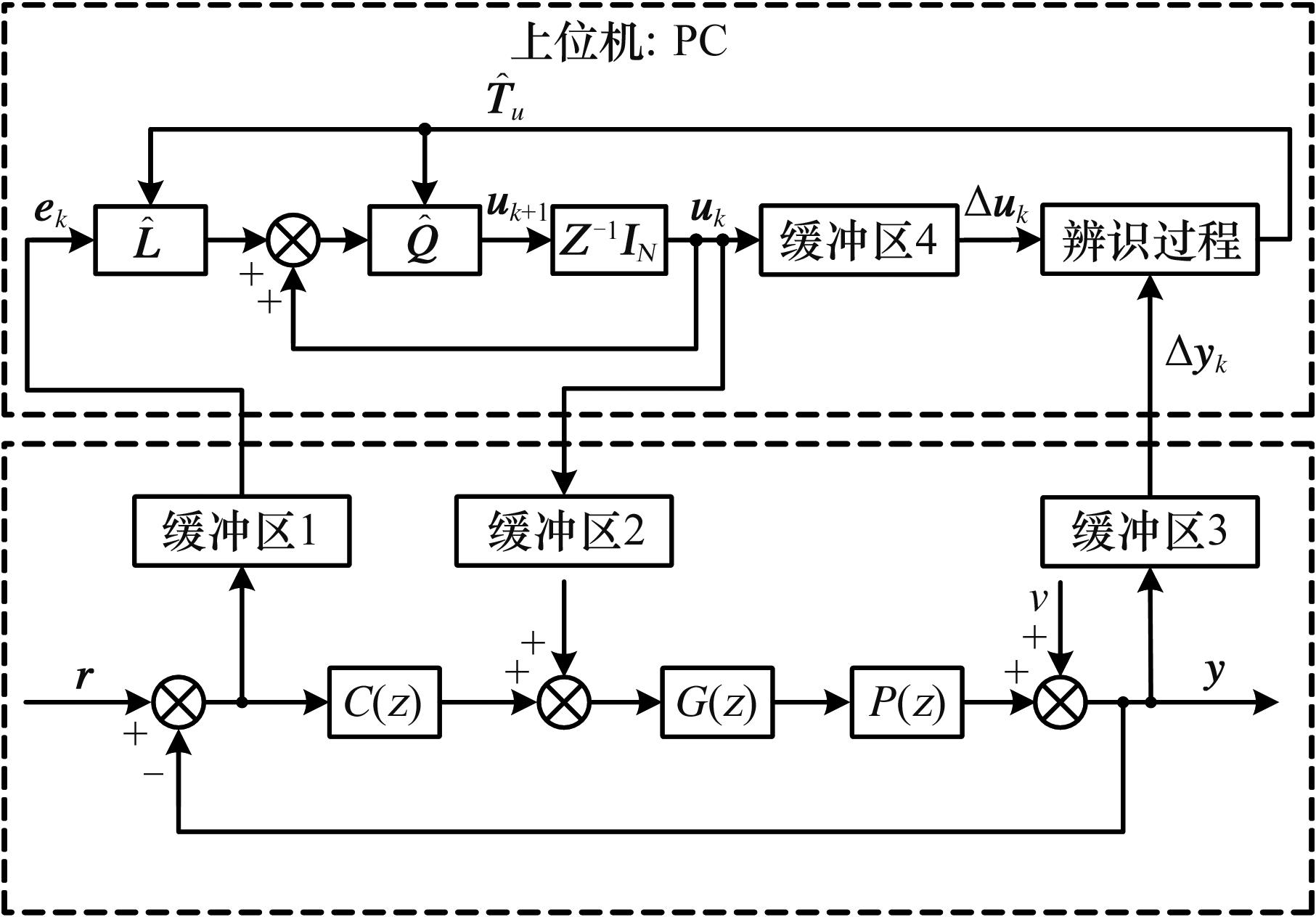
图13 控制方案结构框图
Fig.13 Block diagram of the control scheme
| 前馈信号加权系数 | 最大控制信号/( |
|---|---|
| 48.56 | |
| 46.16 | |
| 42.10 |
表4 η = 1.6×10-7时不同 ω 下的最大控制信号
Tab.4 The maximum control signal under different ω when η = 1.6×10-7
| 前馈信号加权系数 | 最大控制信号/( |
|---|---|
| 48.56 | |
| 46.16 | |
| 42.10 |
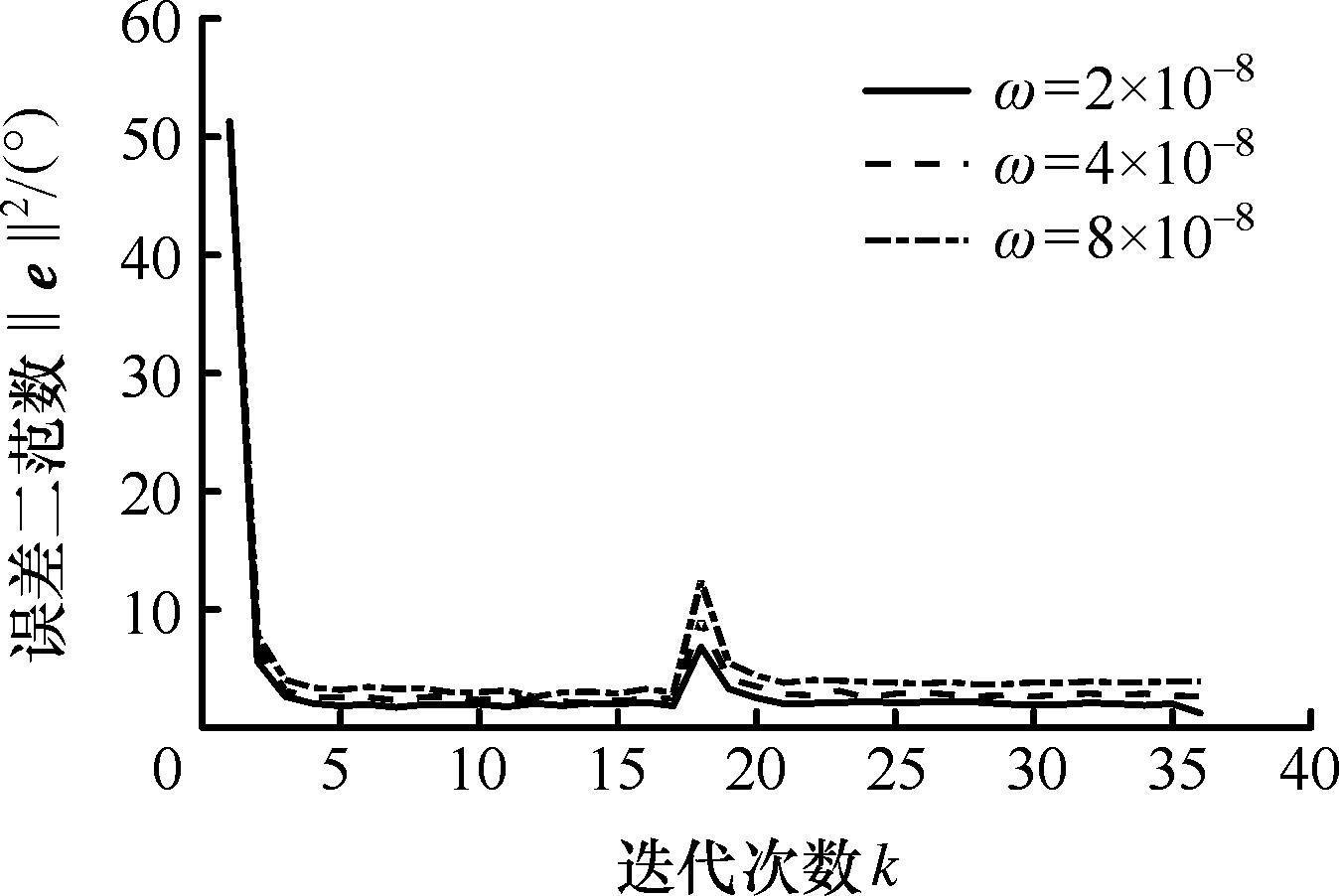
图14 η = 1.6×10-7时,不同 ω 对误差二范数的影响曲线
Fig.14 The influence curve of different ω on the 2-norm of the error when η = 1.6×10-7
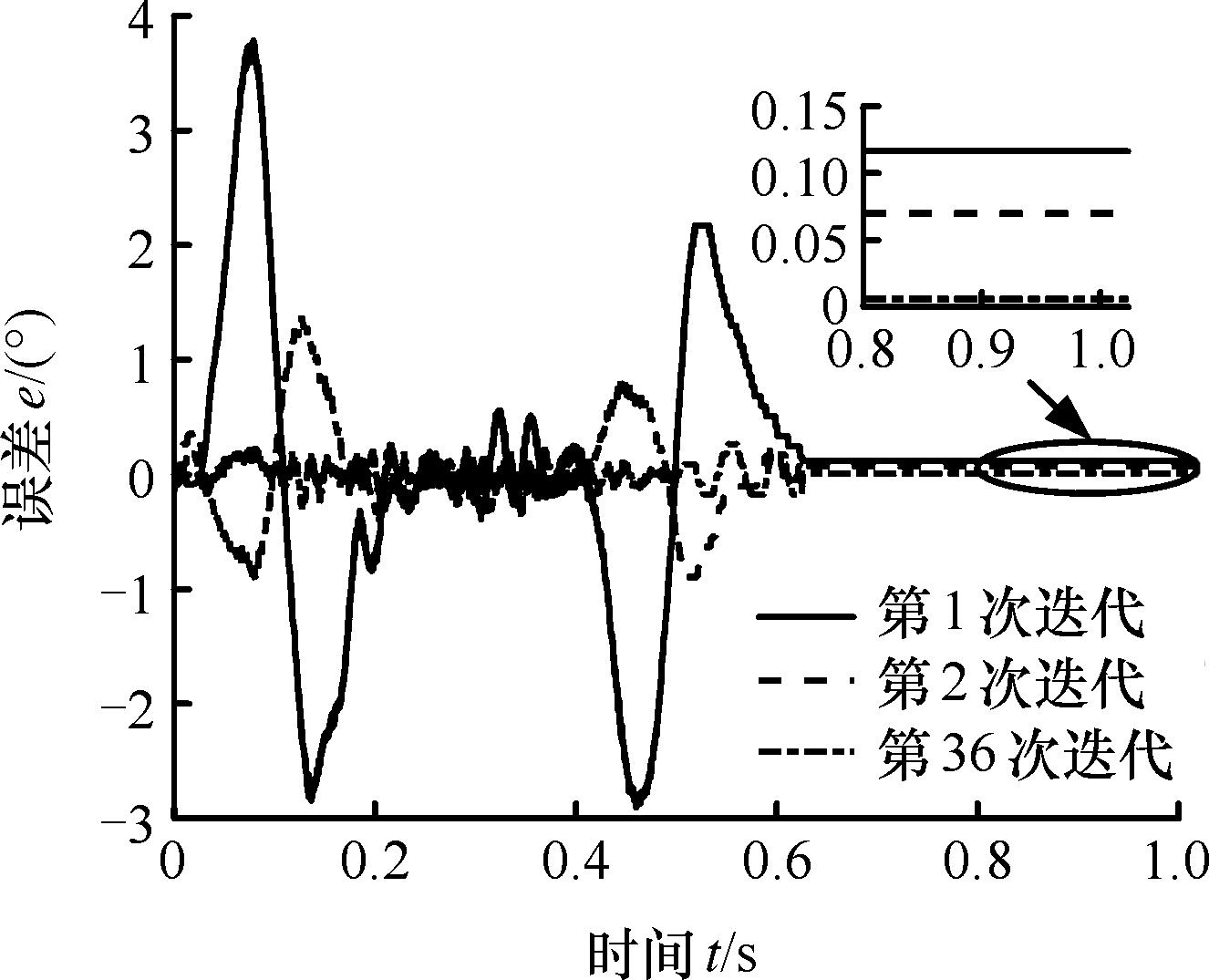
图15 ω = 2×10-8、 η = 1.6×10-7时的全轨迹迭代误差
Fig.15 Full trajectory iterative error when ω = 2×10-8, η = 1.6×10-7
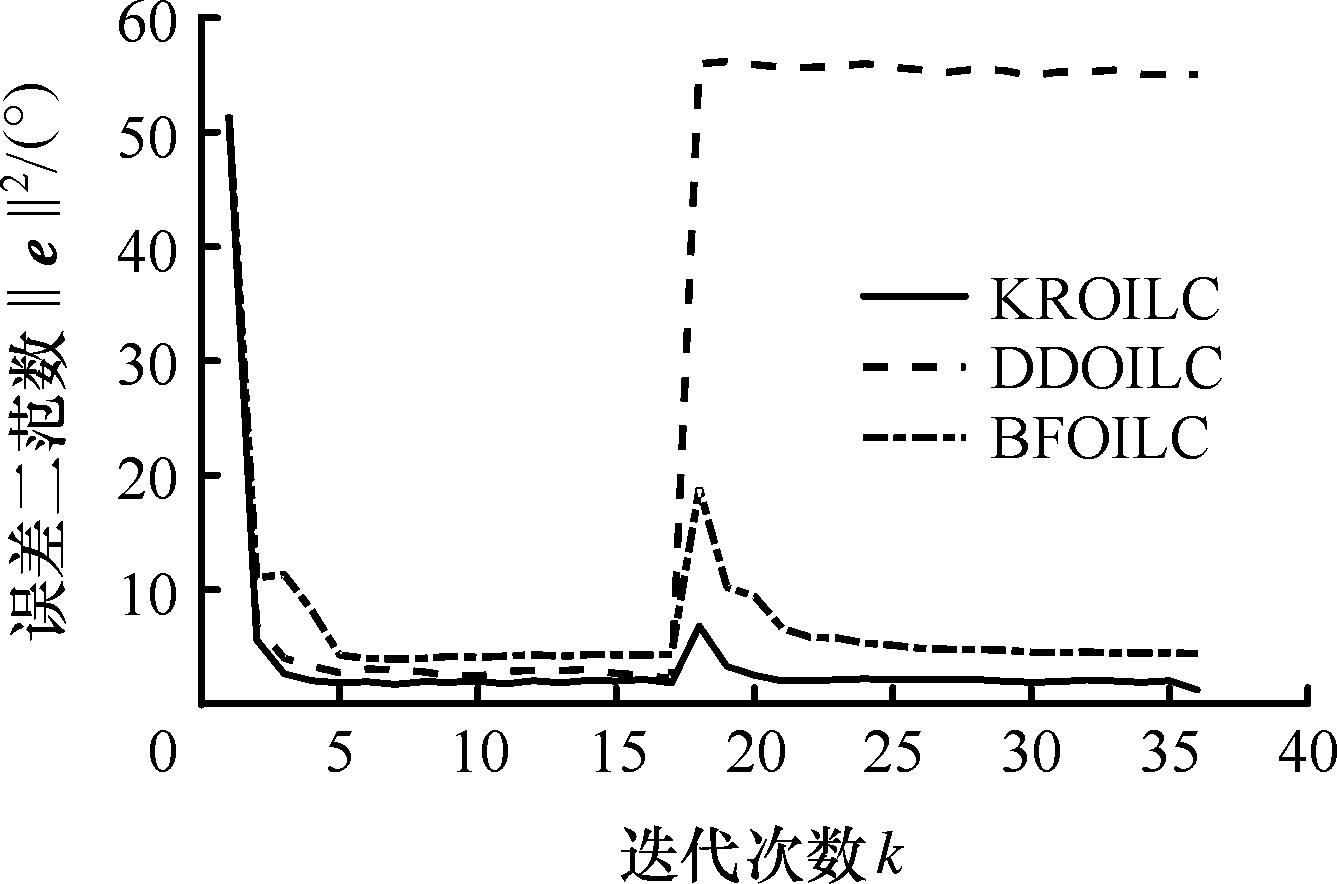
图16 非重复轨迹实验中三种算法的误差二范数
Fig.16 The 2-norm of the error for three algorithms in non-repetitive trajectory experiment
| [1] | GOUBEJ M, MEEUSEN S, MOOREN N, et al. Iterative Learning Control in High-performance Motion Systems:from Theory to Implementation[C]∥2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA). Zaragoza, 2019:851-856. |
| [2] | OOMEN T, ROJAS C R. Sparse Iterative Learning Control with Application to a Wafer Stage:Achieving Performance, Resource Efficiency, and Task Flexibility[J]. Mechatronics, 2017, 47:134-147. |
| [3] | BOEREN F, BAREJA A, KOK T, et al. Frequency-domain ILC Approach for Repeating and Varying Tasks:with Application to Semiconductor Bonding Equipment[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6):2716-2727. |
| [4] | GU P, TIAN S. P-type Iterative Learning Control with Initial State Learning for One-sided Lipschitz Nonlinear Systems[J]. International Journal of Control, Automation and Systems, 2019, 17:2203-2210. |
| [5] | FREEMAN C T. Newton-method Based Iterative Learning Control for Robot-assisted Rehabilitation Using FES[J]. Mechatronics, 2014, 24(8):934-943. |
| [6] | FIORENTINO A, CERETTI E, FERITI G C, et al. Improving Accuracy in Aluminum Incremental Sheet Forming of Complex Geometries Using Iterative Learning Control[J]. Key Engineering Materials, 2015, 651:1096-1102. |
| [7] | BALTA E C, BARTON K, TILBURY D M, et al. Learning-based Repetitive Precision Motion Control with Mismatch Compensation[C]∥2021 60th IEEE Conference on Decision and Control (CDC). Austin, TX, 2021:3605-3610. |
| [8] | van de WIJDEVEN J, BOSGRA O H. Using Basis Functions in Iterative Learning Control:Analysis and Design Theory[J]. International Journal of Control, 2010, 83(4):661-675. |
| [9] | PILLONETTO G, de NICOLAO G. A New Kernel-based Approach for Linear System Identification[J]. Automatica, 2010, 46(1):81-93. |
| [10] | BLANKEN L, OOMEN T. Kernel-based Identification of Non-causal Systems with Application to Inverse Model Control[J]. Automatica, 2020, 114:108830. |
| [11] | PILLONETTO G, DINUZZO F, CHEN T, et al. Kernel Methods in System Identification, Machine Learning and Function Estimation:a Survey[J]. Automatica, 2014, 50(3):657-682. |
| [12] | CHEN T, OHLSSON H, LJUNG L. On the Estimation of Transfer Functions, Regularizations and Gaussian Processes—Revisited[J]. Automatica, 2012, 48(8):1525-1535. |
| [13] | LJUNG L, CHEN T, MU B. A Shift in Paradigm for System Identification[J]. International Journal of Control, 2020, 93(2):173-180. |
| [14] | CHEN T. On Kernel Design for Regularized LTI System Identification[J]. Automatica, 2018, 90:109-122. |
| [15] | THORPE A J, NEARY C, DJEUMOU F, et al. Physics-informed Kernel Embeddings:Integrating Prior System Knowledge with Data-driven Control[C]∥2024 American Control Conference (ACC). Toronto, 2024:3130-3137. |
| [16] | YU X, FANG X, MU B, et al. Kernel-based Regularized Iterative Learning Control of Repetitive Linear Time-varying Systems[J]. Automatica, 2023, 154:111047. |
| [17] | JANSSENS P, PIPELEERS G, SWEVERS J. A Data-driven Constrained Norm-optimal Iterative Learning Control Framework for LTI Systems[J]. IEEE Transactions on Control Systems Technology, 2012, 21(2):546-551. |
| [18] | 杨亮亮, 袁锐, 史伟民, 等. 基于数据驱动的自适应最优迭代学习控制研究[J]. 机械工程学报, 2021, 57(17):207-216. |
| YANG Liangliang, YUAN Rui, SHI Weimin, et al. Research on Data Driven Adaptive Optimal Iterative Learning Control[J]. Journal of Mechanical Engineering, 2021, 57(17):207-216. | |
| [19] | MURPHY K P. Machine Learning:a Probabilistic Perspective [M]. Cambridge, MA:MIT Press, 2012. |
| [20] | BOLDER J, OOMEN T, KOEKEBAKKER S, et al. Using Iterative Learning Control with Basis Functions to Compensate Medium Deformation in a Wide-format Inkjet Printer[J]. Mechatronics, 2014, 24(8):944-953. |
| [1] | 张冀, 袁海博, 王智璇, 朱思华, 白振华. 物理引导的神经网络模型预测铝带冷轧轧制力[J]. 中国机械工程, 2026, 37(5): 1199-1209. |
| [2] | 王黎明, 肖兴源, 李方义, 汪晓光, 李剑峰, 聂延艳, 刘伟彤, 李柳沅, 王忆同, 王泊云, 崔羽齐. 数据驱动的机电产品低碳设计与制造研究综述与展望[J]. 中国机械工程, 2026, 37(4): 764-779. |
| [3] | 孙悦, 黄辉, 尹方辰. 高负载动态工况下工业机器人的能耗预测[J]. 中国机械工程, 2026, 37(4): 939-947. |
| [4] | 贾晨帆, 刘怀举, 朱才朝, 陈泰民, 陈进筱. 基于CatBoost的航空齿轮本体温度预测方法与验证研究[J]. 中国机械工程, 2025, 36(08): 1658-1667. |
| [5] | 郭飞燕1, 张辉2, 宋长杰1, 张硕1. 机理与数据融合驱动的复杂航空复材部件关键装配误差元素辨识方法[J]. 中国机械工程, 2025, 36(07): 1530-1543. |
| [6] | 赵培瑞1, 邓超1, 朱波1, 闫文斌1, 梁敏2, 谌敏2. 基于多元动因驱动的中药制药车间动态调度建模与优化[J]. 中国机械工程, 2025, 36(06): 1247-1260,1299. |
| [7] | 肖刚, 顾海瑞, 董锦锦, 王琪冰, 陆佳炜. 仿真数据驱动的长期服役电梯导轨故障迁移诊断方法[J]. 中国机械工程, 2024, 35(01): 125-135. |
| [8] | 张炜, 侯亮. 云平台数据驱动的产品与供应商资源主从协同优化[J]. 中国机械工程, 2021, 32(09): 1061-1072. |
| [9] | 李聪波;尹誉先;肖溱鸽;龙云;赵希坤. 数据驱动下基于元动作的数控车削能耗预测方法[J]. 中国机械工程, 2020, 31(21): 2601-2611. |
| [10] | 姜少飞;邬天骥;彭翔;李吉泉;李治;孙涛. 基于XGBoost特征提取的数据驱动故障诊断方法[J]. 中国机械工程, 2020, 31(10): 1232-1239. |
| [11] | 吴扬东, 张太华, 刘丹, 王宜全. [数据驱动的产品设计]复杂产品设计方案的数据驱动多属性优化决策[J]. 中国机械工程, 2020, 31(07): 865-870. |
| [12] | 李浩, 王昊琪, 程颖, 陶飞, 郝兵, 王新昌, 纪杨建, 宋文燕, 杜文辽, 文笑雨, 巩晓赟, 李客, 张映锋, 罗国富, 李奇峰. [数据驱动的智能服务]数据驱动的复杂产品智能服务技术与应用[J]. 中国机械工程, 2020, 31(07): 757-772. |
| [13] | 刘银华, 孙芮, 吴欢. [质量优化]基于车身尺寸数据流潜结构建模的装配质量预测控制[J]. 中国机械工程, 2019, 30(02): 237-243. |
| [14] | 杨振良, 汪俊亮, 张洁, 蒋小康. [质量优化]数据驱动的晶圆图缺陷模式识别方法[J]. 中国机械工程, 2019, 30(02): 230-236. |
| [15] | 高贵兵, 岳文辉, 王峰. [设备健康管理]基于CPS方法与脆弱性评估的制造系统健康状态智能诊断[J]. 中国机械工程, 2019, 30(02): 212-219. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||