ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (3): 735-742.DOI: 10.3969/j.issn.1004-132X.2026.03.023
• 工程前沿 • 上一篇
张琳1,2( ), 毕宇辰1, 赵宁2, 孙茗妍2, 魏超3(), 严运兵1
), 毕宇辰1, 赵宁2, 孙茗妍2, 魏超3(), 严运兵1
ZHANG Lin1,2(), BI Yuchen1, ZHAO Ning2, SUN Mingyan2, WEI Chao3(), YAN Yunbing1
摘要:
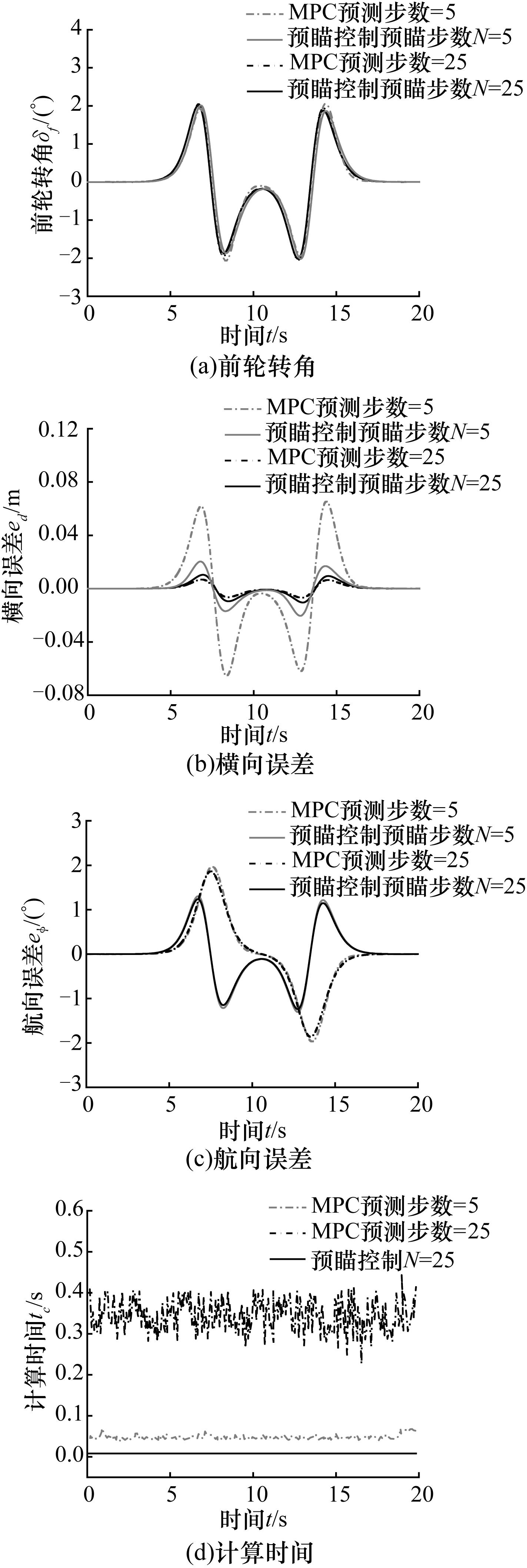
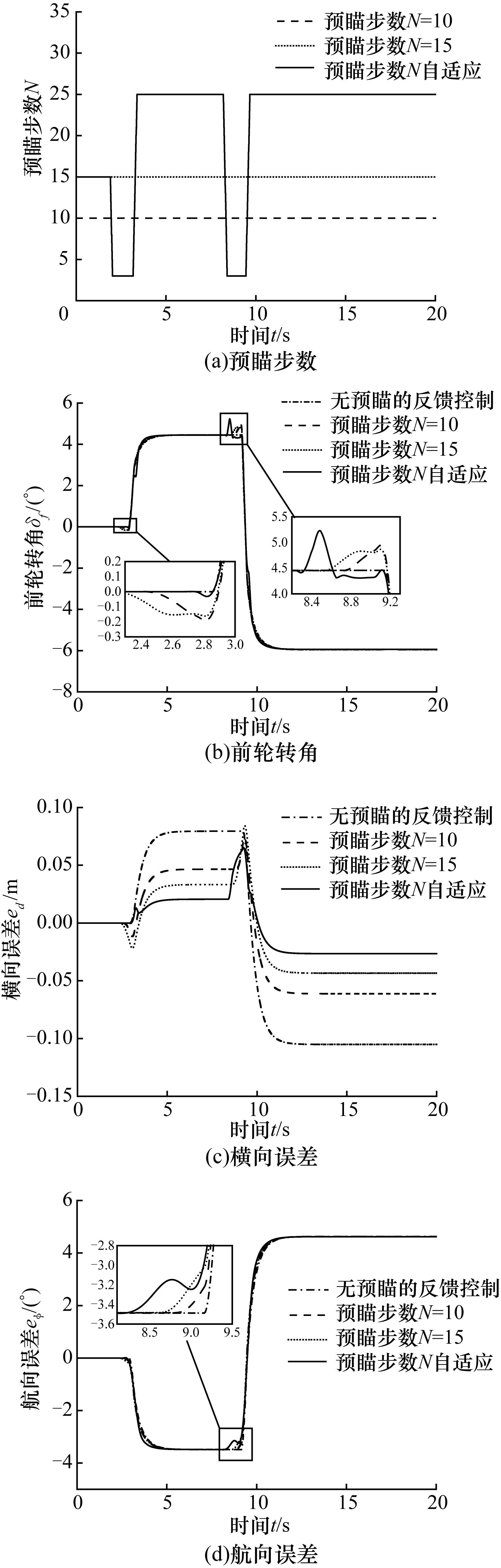
路径跟踪控制在无人驾驶车辆运动控制中至关重要,其控制性能易受到道路曲率快速变化的干扰。提出了一种面向曲率扰动抑制的自适应预瞄路径跟踪控制方法以提高系统在复杂道路环境下的鲁棒性与精度。通过将扰动项嵌入状态向量构造增广线性二次调节问题,并采用高阶Riccati方程降维求解策略进行求解。随后,经频域响应分析验证预瞄控制器的可行性。依据车速和远端预瞄点曲率设计动态调整预瞄步数的自适应调节策略,实现对预瞄距离的在线优化。硬件在环仿真与实车测试验证了路径跟踪算法提高路径跟踪精度与改善行驶稳定性的有效性。
中图分类号: