


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (8): 1824-1831.DOI: 10.3969/j.issn.1004-132X.2025.08.017
• 智能制造 • 上一篇
张红彦1( ), 赵昊阳1, 赵焕峰2, 李念轩1, 孙钦政1, 黄玲涛1()
), 赵昊阳1, 赵焕峰2, 李念轩1, 孙钦政1, 黄玲涛1()
收稿日期:2024-07-29
出版日期:2025-08-25
发布日期:2025-09-18
通讯作者:
黄玲涛
作者简介:张红彦,女,1973年生,副教授、博士。研究方向为智能移动机器人。E-mail:zhanghy@jlu.edu.cn。
基金资助:
Hongyan ZHANG1(), Haoyang ZHAO1, Huanfeng ZHAO2, Nianxuan LI1, Qinzheng SUN1, Lingtao HUANG1()
Received:2024-07-29
Online:2025-08-25
Published:2025-09-18
Contact:
Lingtao HUANG
摘要:
目前多数LiDAR-SLAM系统采用前端里程计估计初始位姿和后端优化位姿的方法,缺少批量的后端优化方案。针对此问题,提出了一个完整的基于显式几何特征的激光雷达同时定位与建图(SLAM)系统。采用凝聚层次聚类方法实现平面特征点云平面分割并通过计算点云的局部曲率值筛选直线特征点;通过配准点云特征和特征子地图实现激光雷达运动的初始位姿估计;采用基于直线和平面基元的局部状态优化方法,基于因子图模型融合了直线因子和平面因子,通过最小化直线到直线和平面到平面的残差,实现了位姿、直线和平面参数的联合批量优化。实验结果表明,所提SLAM系统在其他场景下也能实现较高精度的定位和地图构建,满足SLAM的实时性要求。
中图分类号:
张红彦, 赵昊阳, 赵焕峰, 李念轩, 孙钦政, 黄玲涛. 一种显式几何特征匹配的激光雷达SLAM方法[J]. 中国机械工程, 2025, 36(8): 1824-1831.
Hongyan ZHANG, Haoyang ZHAO, Huanfeng ZHAO, Nianxuan LI, Qinzheng SUN, Lingtao HUANG. An Explicit Geometric Feature Matching LiDAR SLAM Method[J]. China Mechanical Engineering, 2025, 36(8): 1824-1831.

图1 有序点云的深度图像
Fig.1 Depth image of an ordered point cloud
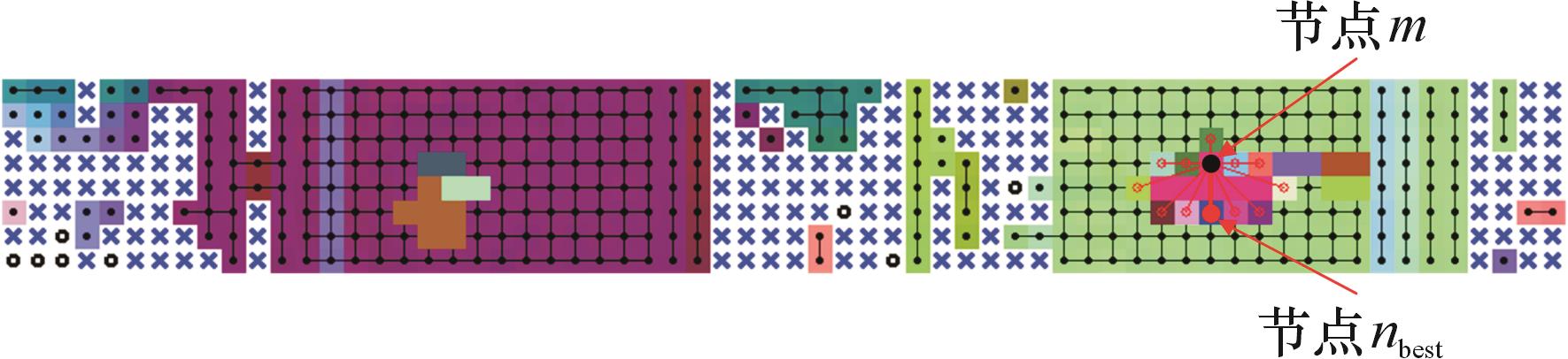
图2 合并邻居节点示意图
Fig.2 Schematic diagram of merging neighbor nodes

图3 AHC平面粗略分割效果示意图
Fig.3 Schematic diagram of the rough segmentation effect of the AHC plane

图4 优化后的平面分割效果
Fig.4 Optimized plane segmentation effect

图5 平面分割结果的三维点云
Fig.5 A 3D point cloud of the result of plane segmentation

图6 直线提取结果的二维投影
Fig.6 The 2D projection of the results extracted from a straight line
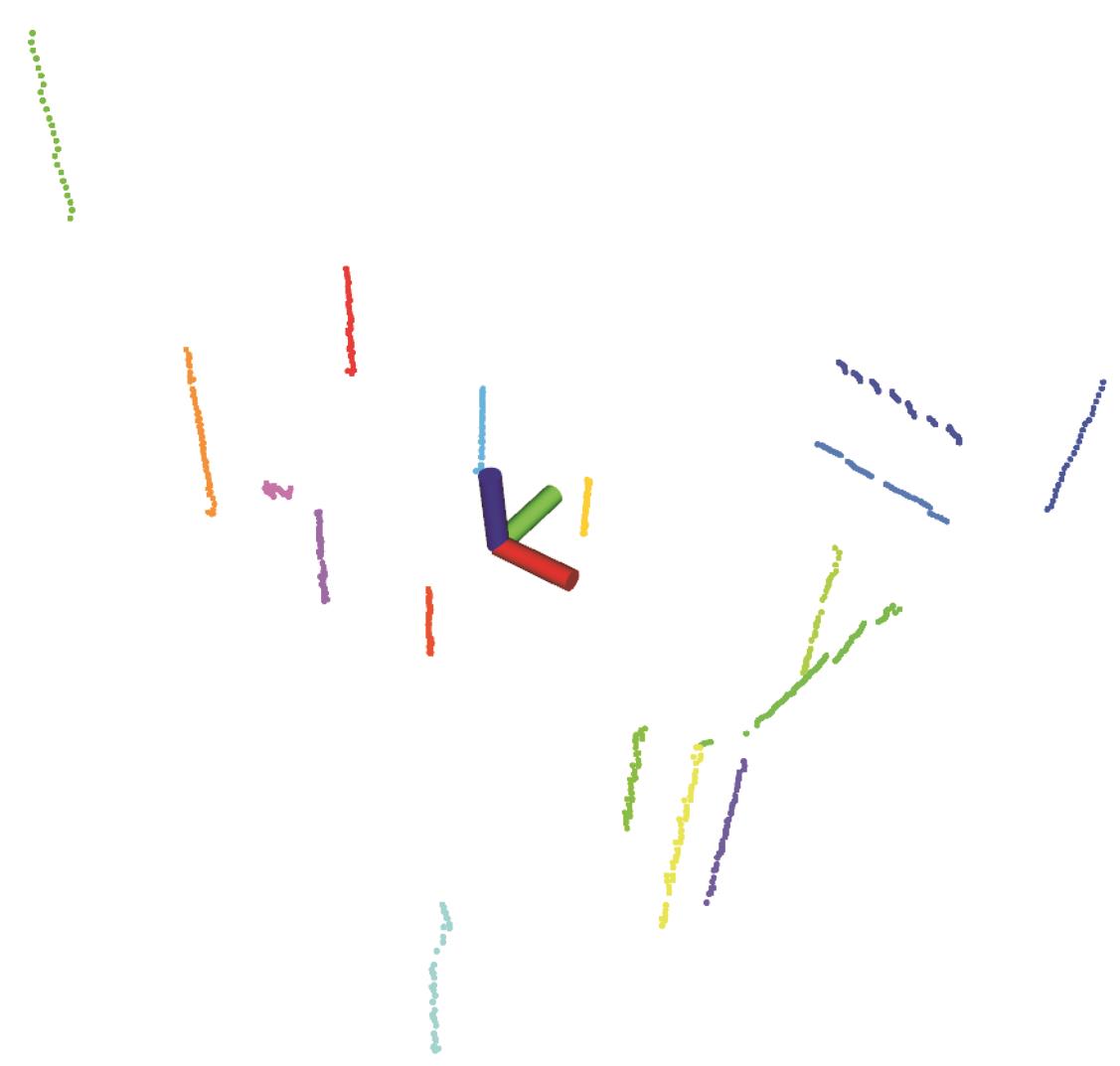
图7 直线提取结果的三维点云
Fig.7 The 3D point cloud extracted from the linear results
| 序列名称 | 场景 | 帧数 | 难度 | 时长/s | 长度/m |
|---|---|---|---|---|---|
| 序列1 | 方形庭院 | 1991 | 简单 | 198 | 246.7 |
| 序列2 | 方形庭院 | 1910 | 中等 | 190 | 260.4 |
| 序列3 | 环形走廊 | 2788 | 简单 | 190 | 428.8 |
| 序列4 | 数学研究所 | 2160 | 简单 | 216 | 263.6 |
| 序列5 | 数学研究所 | 1770 | 中等 | 176 | 176.9 |
| 序列6 | 地下矿洞 | 1412 | 简单 | 141 | 162.5 |
| 序列7 | 地下矿洞 | 1487 | 中等 | 148 | 174.1 |
表1 Newer College Dataset 序列信息
Tab.1 Newer college dataset sequence information
| 序列名称 | 场景 | 帧数 | 难度 | 时长/s | 长度/m |
|---|---|---|---|---|---|
| 序列1 | 方形庭院 | 1991 | 简单 | 198 | 246.7 |
| 序列2 | 方形庭院 | 1910 | 中等 | 190 | 260.4 |
| 序列3 | 环形走廊 | 2788 | 简单 | 190 | 428.8 |
| 序列4 | 数学研究所 | 2160 | 简单 | 216 | 263.6 |
| 序列5 | 数学研究所 | 1770 | 中等 | 176 | 176.9 |
| 序列6 | 地下矿洞 | 1412 | 简单 | 141 | 162.5 |
| 序列7 | 地下矿洞 | 1487 | 中等 | 148 | 174.1 |
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 误差均值 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 0.0856 | 0.4034 | 0.2639 | 0.0863 | 0.8257 | 0.1451 | 0.1935 | 0.2862 |
| LeGO-LOAM | 0.0929 | 0.5453 | 0.1865 | 0.1303 | 0.4315 | 0.1081 | 0.1311 | 0.2322 |
| LL-LO | 0.1139 | 0.3569 | 0.2942 | 0.1522 | 0.3162 | 0.1255 | 0.1629 | 0.2174 |
| LP-LO | 0.1068 | 0.3847 | 0.1742 | 0.1182 | 0.2835 | 0.1138 | 0.1497 | 0.1901 |
| LPL-LO | 0.0888 | 0.2912 | 0.1224 | 0.0804 | 0.2617 | 0.0919 | 0.1244 | 0.1515 |
| LPL-SLAM | 0.0865 | 0.2891 | 0.1027 | 0.0685 | 0.2388 | 0.0683 | 0.0935 | 0.1353 |
表2 绝对轨迹平移误差 (m)
Tab.2 Absolute trajectory translation error
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 误差均值 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 0.0856 | 0.4034 | 0.2639 | 0.0863 | 0.8257 | 0.1451 | 0.1935 | 0.2862 |
| LeGO-LOAM | 0.0929 | 0.5453 | 0.1865 | 0.1303 | 0.4315 | 0.1081 | 0.1311 | 0.2322 |
| LL-LO | 0.1139 | 0.3569 | 0.2942 | 0.1522 | 0.3162 | 0.1255 | 0.1629 | 0.2174 |
| LP-LO | 0.1068 | 0.3847 | 0.1742 | 0.1182 | 0.2835 | 0.1138 | 0.1497 | 0.1901 |
| LPL-LO | 0.0888 | 0.2912 | 0.1224 | 0.0804 | 0.2617 | 0.0919 | 0.1244 | 0.1515 |
| LPL-SLAM | 0.0865 | 0.2891 | 0.1027 | 0.0685 | 0.2388 | 0.0683 | 0.0935 | 0.1353 |
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 平均误差 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 1.3262 | 2.1683 | 1.8402 | 0.6375 | 3.9587 | 2.1558 | 2.6240 | 2.1015 |
| LeGO-LOAM | 1.3705 | 2.3082 | 1.9917 | 0.8802 | 3.3395 | 2.3710 | 2.3344 | 2.0851 |
| LL-LO | 2.1462 | 2.3851 | 2.3518 | 0.9573 | 3.6842 | 2.3568 | 2.5713 | 2.3504 |
| LP-LO | 1.7438 | 2.4692 | 2.1566 | 0.8359 | 3.1183 | 2.1366 | 2.1724 | 2.0904 |
| LPL-LO | 1.3405 | 2.2011 | 1.6433 | 0.5451 | 2.9053 | 1.9088 | 2.1230 | 1.8096 |
| LPL-SLAM | 1.2309 | 2.1816 | 1.5943 | 0.5553 | 2.8719 | 1.9140 | 2.0116 | 1.7656 |
表3 绝对轨迹角度误差 (°)
Tab.3 Absolute trajectory angular error
| 方法 | 序列1 | 序列2 | 序列3 | 序列4 | 序列5 | 序列6 | 序列7 | 平均误差 |
|---|---|---|---|---|---|---|---|---|
| A-LOAM | 1.3262 | 2.1683 | 1.8402 | 0.6375 | 3.9587 | 2.1558 | 2.6240 | 2.1015 |
| LeGO-LOAM | 1.3705 | 2.3082 | 1.9917 | 0.8802 | 3.3395 | 2.3710 | 2.3344 | 2.0851 |
| LL-LO | 2.1462 | 2.3851 | 2.3518 | 0.9573 | 3.6842 | 2.3568 | 2.5713 | 2.3504 |
| LP-LO | 1.7438 | 2.4692 | 2.1566 | 0.8359 | 3.1183 | 2.1366 | 2.1724 | 2.0904 |
| LPL-LO | 1.3405 | 2.2011 | 1.6433 | 0.5451 | 2.9053 | 1.9088 | 2.1230 | 1.8096 |
| LPL-SLAM | 1.2309 | 2.1816 | 1.5943 | 0.5553 | 2.8719 | 1.9140 | 2.0116 | 1.7656 |
| 序列名称 | 场景 | 帧数 | 时长/s | 长度/m |
|---|---|---|---|---|
| 序列1 | 机械馆 | 3422 | 343 | 386.4 |
| 序列2 | 机械馆 | 2904 | 291 | 321.7 |
| 序列3 | 体育馆 | 4284 | 429 | 606.4 |
表4 自制数据集序列信息
Tab.4 Scene diagram of a custom dataset
| 序列名称 | 场景 | 帧数 | 时长/s | 长度/m |
|---|---|---|---|---|
| 序列1 | 机械馆 | 3422 | 343 | 386.4 |
| 序列2 | 机械馆 | 2904 | 291 | 321.7 |
| 序列3 | 体育馆 | 4284 | 429 | 606.4 |
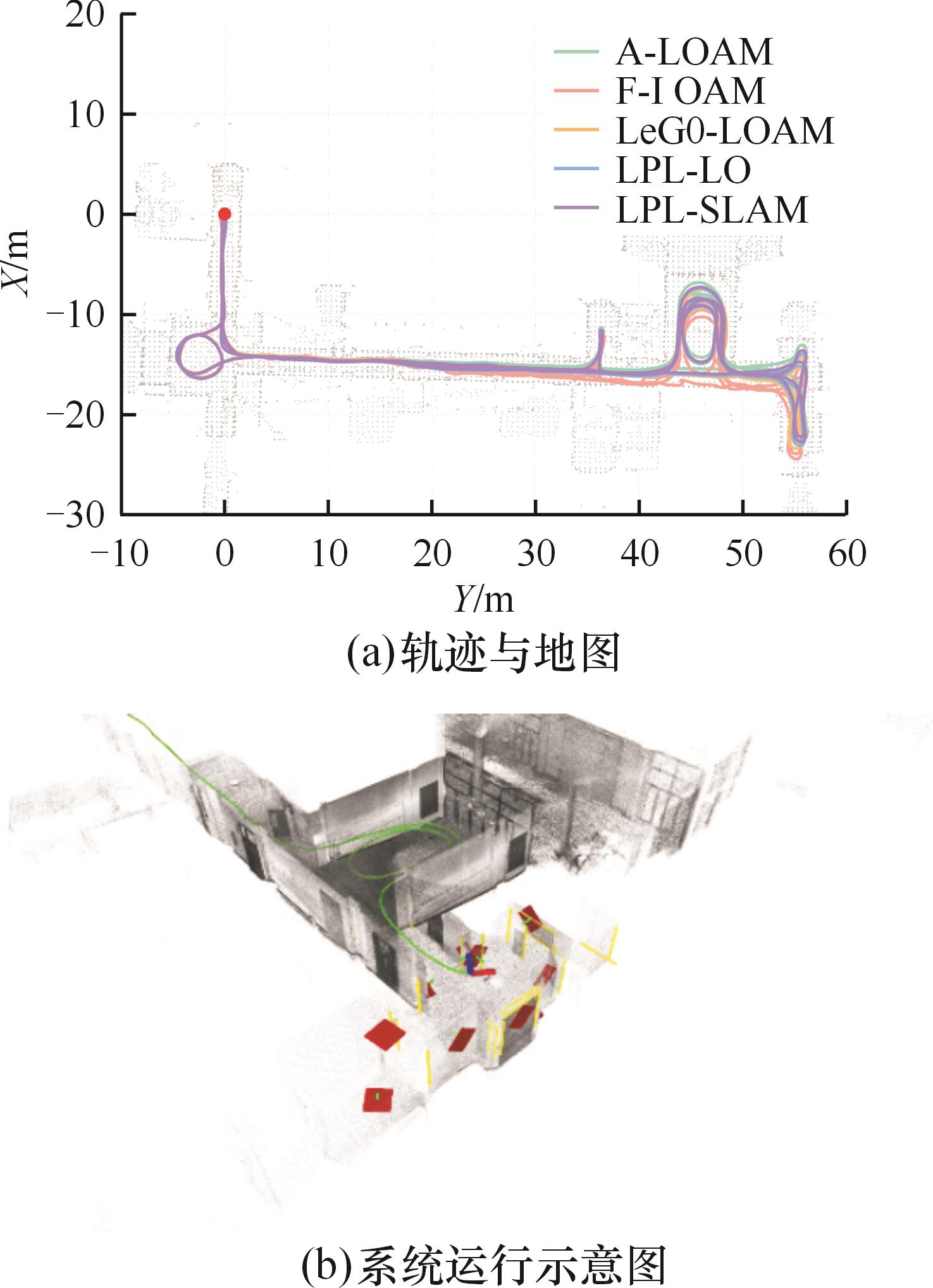
图8 自制数据集序列1实验结果
Fig.8 Experimental results of self-made data set sequence 1
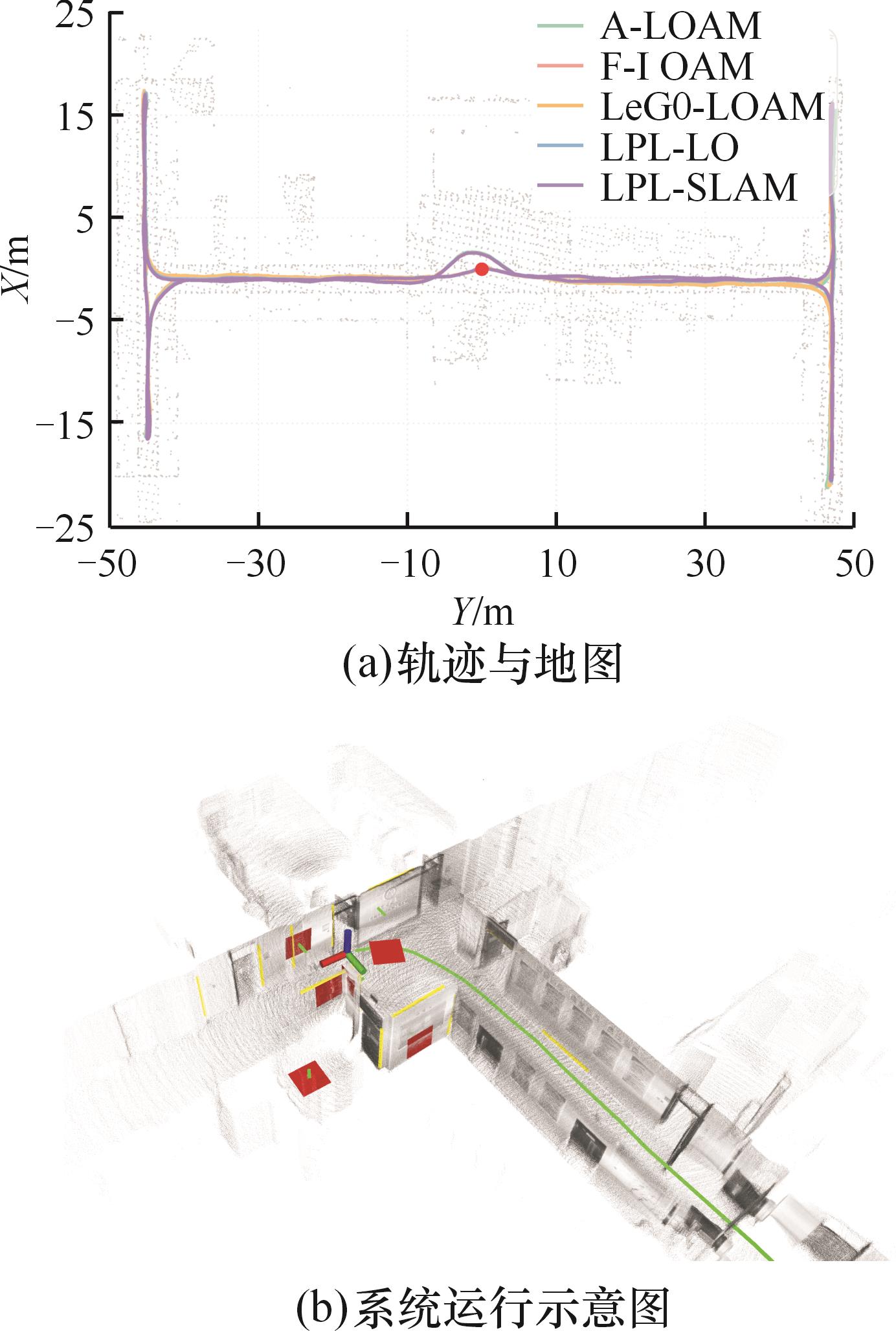
图9 自制数据集序列2实验结果
Fig.9 Experimental results of self-made data set sequence 2
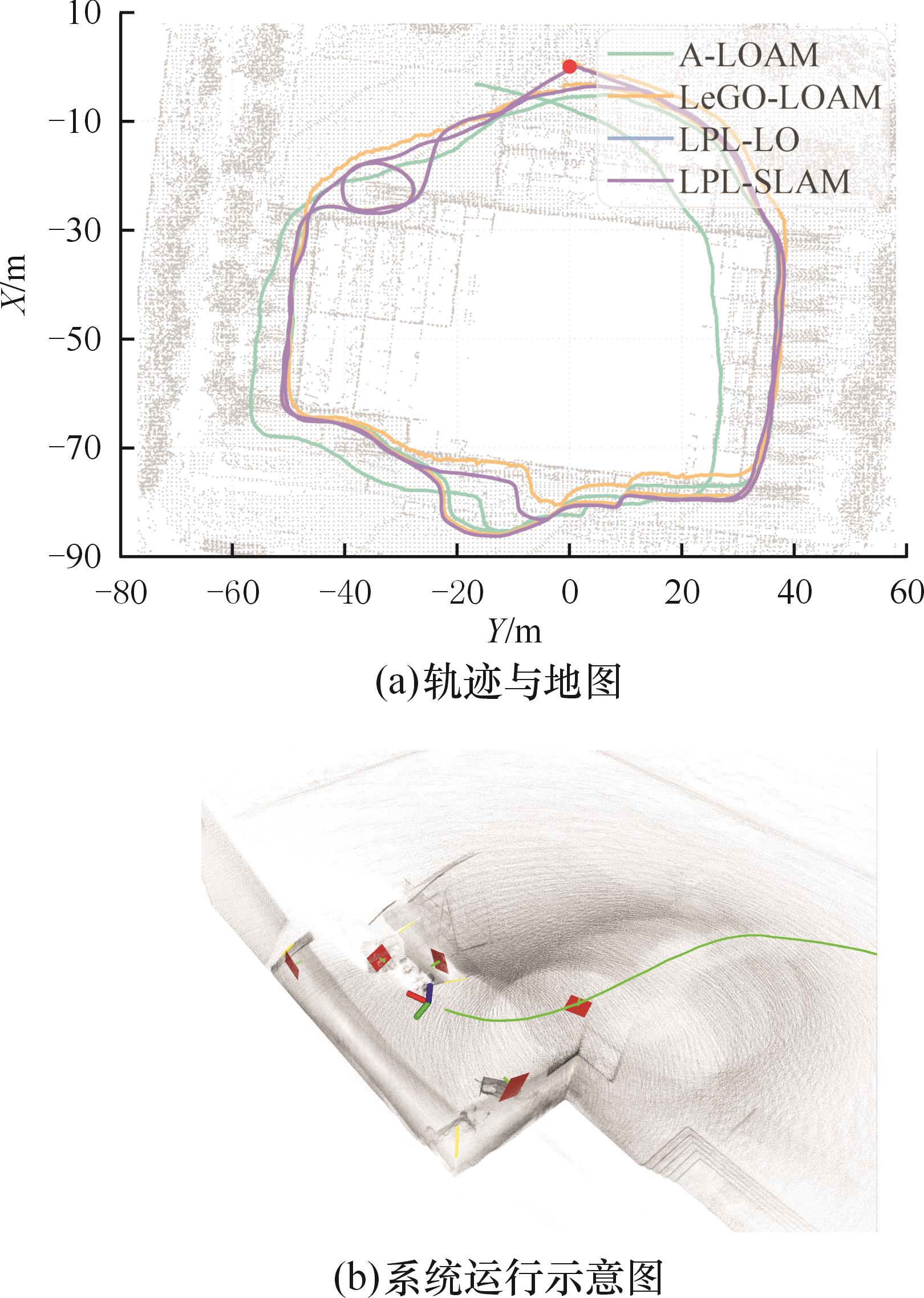
图10 自制数据集序列3实验结果
Fig.10 Experimental results of self-made data set sequence 3
| 序列名称 | A-LOAM | LeGO-LOAM | LPL-LO | LPL-SLAM |
|---|---|---|---|---|
| 序列1 | 0.131 m/2.146° | 0.245 m/2.436° | 0.104 m/1.708° | 0.075 m/1.485° |
| 序列2 | 0.096 m/2.348° | 0.075 m/2.341° | 0.091 m/1.522° | 0.062 m/1.379° |
| 序列3 | 17.43 m/5.269° | 0.535 m/2.571° | 0.205 m/2.675° | 0.121 m/1.841° |
表5 相对平移/角度误差
Tab.5 Relative translation/rotation error
| 序列名称 | A-LOAM | LeGO-LOAM | LPL-LO | LPL-SLAM |
|---|---|---|---|---|
| 序列1 | 0.131 m/2.146° | 0.245 m/2.436° | 0.104 m/1.708° | 0.075 m/1.485° |
| 序列2 | 0.096 m/2.348° | 0.075 m/2.341° | 0.091 m/1.522° | 0.062 m/1.379° |
| 序列3 | 17.43 m/5.269° | 0.535 m/2.571° | 0.205 m/2.675° | 0.121 m/1.841° |
| 序列名称 | 特征提取 | 位姿优化 | 局部优化 | 全局优化 |
|---|---|---|---|---|
| LPL-SLAM/Newer College Dataset 序列 1 | 24.07 | 20.67 | 19.44 | 88.53 |
| LPL-SLAM/校园数据集 序列 1 | 17.51 | 14.97 | 26.02 | 109.6 |
表6 各模块运行时间 (ms)
Tab.6 Runtime of each module
| 序列名称 | 特征提取 | 位姿优化 | 局部优化 | 全局优化 |
|---|---|---|---|---|
| LPL-SLAM/Newer College Dataset 序列 1 | 24.07 | 20.67 | 19.44 | 88.53 |
| LPL-SLAM/校园数据集 序列 1 | 17.51 | 14.97 | 26.02 | 109.6 |
| 序列名称 | 局部优化 |
|---|---|
| LPL-SLAM/Newer CollegeDataset 序列1 | 19.44 |
| LPL-SLAM/校园数据集 序列1 | 26.02 |
| A-LOAM/Newer College Dataset 序列1 | 10.27 |
| A-LOAM/校园数据集 序列1 | 11.98 |
表7 局部优化运行时间 (ms)
Tab.7 Local optimization runtime
| 序列名称 | 局部优化 |
|---|---|
| LPL-SLAM/Newer CollegeDataset 序列1 | 19.44 |
| LPL-SLAM/校园数据集 序列1 | 26.02 |
| A-LOAM/Newer College Dataset 序列1 | 10.27 |
| A-LOAM/校园数据集 序列1 | 11.98 |
| [1] | GALVEZ-LÓPEZ D, TARDOS J D. Bags of Binary Words for Fast Place Recognition in Image Sequences[J]. IEEE Transactions on Robotics, 2012, 28(5):1188-1197. |
| [2] | RIBEIRO M I. Kalman and Extended Kalman Filters: Concept, Derivation and Properties[J]. Institute for Systems and Robotics, 2004, 43(46):3736-3741. |
| [3] | MURPHY K, RUSSELL S. Rao-blackwellised Particle Filtering for Dynamic Bayesian Networks[M]∥Sequential Monte Carlo Methods in Practice. New York: Springer New York, 2001:499-515. |
| [4] | THRUN S. Probabilistic Robotics[J]. Communications of the ACM, 2002, 45(3):52-57. |
| [5] | OLSON E B. Real-time Correlative Scan Matching[C]∥2009 IEEE International Conference on Robotics and Automation. Kobe, 2009:4387-4393. |
| [6] | ZHANG Ji, SINGH S. LOAM:Lidar Odometry and Mapping in Real-time[C]∥Robotics:Science and Systems. Berkeley, 2014:1-9. |
| [7] | SHAN Tixiao, ENGLOT B. LeGO-LOAM:Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain[C]∥2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, 2018:4758-4765. |
| [8] | WANG Han, WANG Chen, CHEN Chunlin, et al. F-LOAM:Fast LiDAR Odometry and Mapping[C]∥2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Prague, 2021:4390-4396. |
| [9] | PAN Yue, XIAO Pengchuan, HE Yujie, et al. MULLS: Versatile LiDAR SLAM via Multi-metric Linear Least Square[C]∥2021 IEEE International Conference on Robotics and Automation (ICRA). Xi'an, 2021:11633-11640. |
| [10] | YANG Heng, SHI Jingnan, CARLONE L. TEASER:Fast and Certifiable Point Cloud Registration[J]. IEEE Transactions on Robotics, 2021, 37(2):314-333. |
| [11] | SÜNDERHAUF N, PROTZEL P. Towards a Robust Back-end for Pose Graph SLAM[C]∥2012 IEEE International Conference on Robotics and Automation. St Paul, 2012:1254-1261. |
| [12] | WANG Han, WANG Chen, XIE Lihua. Intensity-SLAM:Intensity Assisted Localization and Mapping for Large Scale Environment[J]. IEEE Robotics and Automation Letters, 2021, 6(2):1715-1721. |
| [13] | WOLD S, ESBENSEN K, GELADI P. Principal Component Analysis[J]. Chemometrics and Intelligent Laboratory Systems, 1987, 2(1/2/3):37-52. |
| [14] | BEHLEY J, STACHNISS C. Efficient Surfel-based SLAM Using 3D Laser Range Data in Urban Environments[C]∥Robotics: Science and Systems. Pittsburgh, 2018:46954808. |
| [15] | FENG Chen, TAGUCHI Y, KAMAT V R. Fast Plane Extraction in Organized Point Clouds Using Agglomerative Hierarchical Clustering[C]∥2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, 2014:6218-6225. |
| [16] | GAO Haiming, ZHANG Xuebo, FANG Yongchun, et al. A Line Segment Extraction Algorithm Using Laser Data Based on Seeded Region Growing[J]. International Journal of Advanced Robotic Systems, 2018, 15:1729881418755245. |
| [17] | ZUO Xingxing, XIE Xiaojia, LIU Yong, et al. Robust Visual SLAM with Point and Line Features[C]∥2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, 2017:1775-1782. |
| [18] | GENEVA P, ECKENHOFF K, YANG Yulin, et al. Lips:LiDAR-inertial 3D Plane Slam[C]∥2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, 2018:123-130. |
| [19] | ZHANG L, CAMURRI M, WISTH D, et al. Multi-camera LiDAR Inertial Extension to the Newer College Dataset[M]∥arXiv Preprint, 2022. |
| [20] | LIU Zheng, LI Haotian, YUAN Chongjian, et al. Voxel-SLAM:a Complete, Accurate, and Versatile LiDAR-Inertial SLAM System [EB/OL]. arXiv:2410.08935, 2024-10-11[2024-10-20]. . |
| [21] | XU Ziheng, LI Qingfeng, CHEN Chen, et al. GLC-SLAM:Gaussian Splatting SLAM with Efficient Loop Closure [EB/OL]. arXiv:2409.10982, 2024-09-17[2024-10-20]. . |
| [1] | 滕佳篷, 武国启. 基于SOA-VMD-ICA的海水泵激励源特征提取方法[J]. 中国机械工程, 2024, 35(08): 1373-1380. |
| [2] | 高新勤, 杨学琦, 郑海洋. 基于多源域迁移学习的带式输送机剩余寿命预测方法[J]. 中国机械工程, 2024, 35(08): 1435-1448. |
| [3] | 葛吉民1, 邓朝晖2, 王水仙1, 卓荣锦1, 刘伟1, 陈曦3. 基于点云的机器人焊缝自动化磨削系统与方法[J]. 中国机械工程, 2024, 35(07): 1253-1262,1268. |
| [4] | 籍永建, 姚利诚, . 机器人铣削加工颤振自适应识别方法研究[J]. 中国机械工程, 2023, 34(18): 2165-2176. |
| [5] | 郑近德, 陈焱, 童靳于, 潘海洋. 精细广义复合多元多尺度反向散布熵及其在滚动轴承故障诊断中的应用[J]. 中国机械工程, 2023, 34(11): 1315-1325. |
| [6] | 刘小峰, 张天瑀, 张春兵, 柏林. 基于交叉递归率的复材板损伤定位成像方法[J]. 中国机械工程, 2023, 34(08): 940-947. |
| [7] | 赵靖, 杨绍普, 李强, 刘永强, . 一种残差注意力迁移学习方法及其在滚动轴承故障诊断中的应用[J]. 中国机械工程, 2023, 34(03): 332-343. |
| [8] | 张亢, 田泽宇, 陈向民, 廖力达, 吴家腾. 多通道多分量分解方法在变转速工况齿轮故障特征提取中的应用[J]. 中国机械工程, 2022, 33(20): 2483-2491. |
| [9] | 陈冬梅, 赵思恒, 魏承印, 陈亚杰. 船舶柴油机状态监测及预测性维护研究及应用[J]. 中国机械工程, 2022, 33(10): 1162-1168. |
| [10] | 蒋佳炜, 胡以怀, 方云虎, 张陈, 芮晓松, 汪猛. 基于多尺度时域平均分解和模糊熵的船用风机故障诊断方法[J]. 中国机械工程, 2022, 33(10): 1178-1188. |
| [11] | 张龙, 蔡秉桓, 熊国良, 王朝兵, 胡俊锋. 滚动轴承自适应特征提取的包络谱多点峭度多级降噪方法[J]. 中国机械工程, 2021, 32(24): 2950-2959. |
| [12] | 赵志宏, 李乐豪, 杨绍普, 李晴. 一种频域特征提取自编码器及其在故障诊断中的应用研究[J]. 中国机械工程, 2021, 32(20): 2468-2474. |
| [13] | 郭俊超, 甄冬, 孟召宗, 师占群, 谷丰收. 基于WAEEMD和MSB的滚动轴承故障特征提取[J]. 中国机械工程, 2021, 32(15): 1793-1800. |
| [14] | 许鹏, 方舟, 王平, 耿明, 许勇. 基于脉冲漏磁暂态特征的缺陷量化评估方法[J]. 中国机械工程, 2021, 32(07): 860-866,881. |
| [15] | 江志农1;王子嘉1;张进杰2;黄翼飞3;茆志伟2. 基于能量算子梯度邻域特征提取的核电应急柴油发电机组故障诊断方法[J]. 中国机械工程, 2021, 32(05): 617-623. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||