

ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
China Mechanical Engineering ›› 2026, Vol. 37 ›› Issue (5): 1037-1044.DOI: 10.3969/j.issn.1004-132X.2026.05.003
Previous Articles Next Articles
JIANG Lijie1,2( ), YANG Hang1,3, HAN Dong2, SUN Yanming1, WANG Yixin1, WU Qiankun1, JIA Lianhui1
), YANG Hang1,3, HAN Dong2, SUN Yanming1, WANG Yixin1, WU Qiankun1, JIA Lianhui1
Received:2025-08-16
Online:2026-05-25
Published:2026-06-09
Contact:
JIANG Lijie
姜礼杰1,2(), 杨航1,3, 韩冬2, 孙颜明1, 王一新1, 吴乾坤1, 贾连辉1
通讯作者:
姜礼杰
作者简介:姜礼杰*(通信作者),男,1987年生,博士研究生、高级工程师。研究方向为机器人技术及应用、隧道掘进机设计等。E-mail:jianglijie001@126.com。
基金资助:CLC Number:
JIANG Lijie, YANG Hang, HAN Dong, SUN Yanming, WANG Yixin, WU Qiankun, JIA Lianhui. Design and Applications of Disc Cutter Changing Robots for Shield Machines[J]. China Mechanical Engineering, 2026, 37(5): 1037-1044.
姜礼杰, 杨航, 韩冬, 孙颜明, 王一新, 吴乾坤, 贾连辉. 盾构换刀机器人设计与应用[J]. 中国机械工程, 2026, 37(5): 1037-1044.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.cmemo.org.cn/EN/10.3969/j.issn.1004-132X.2026.05.003
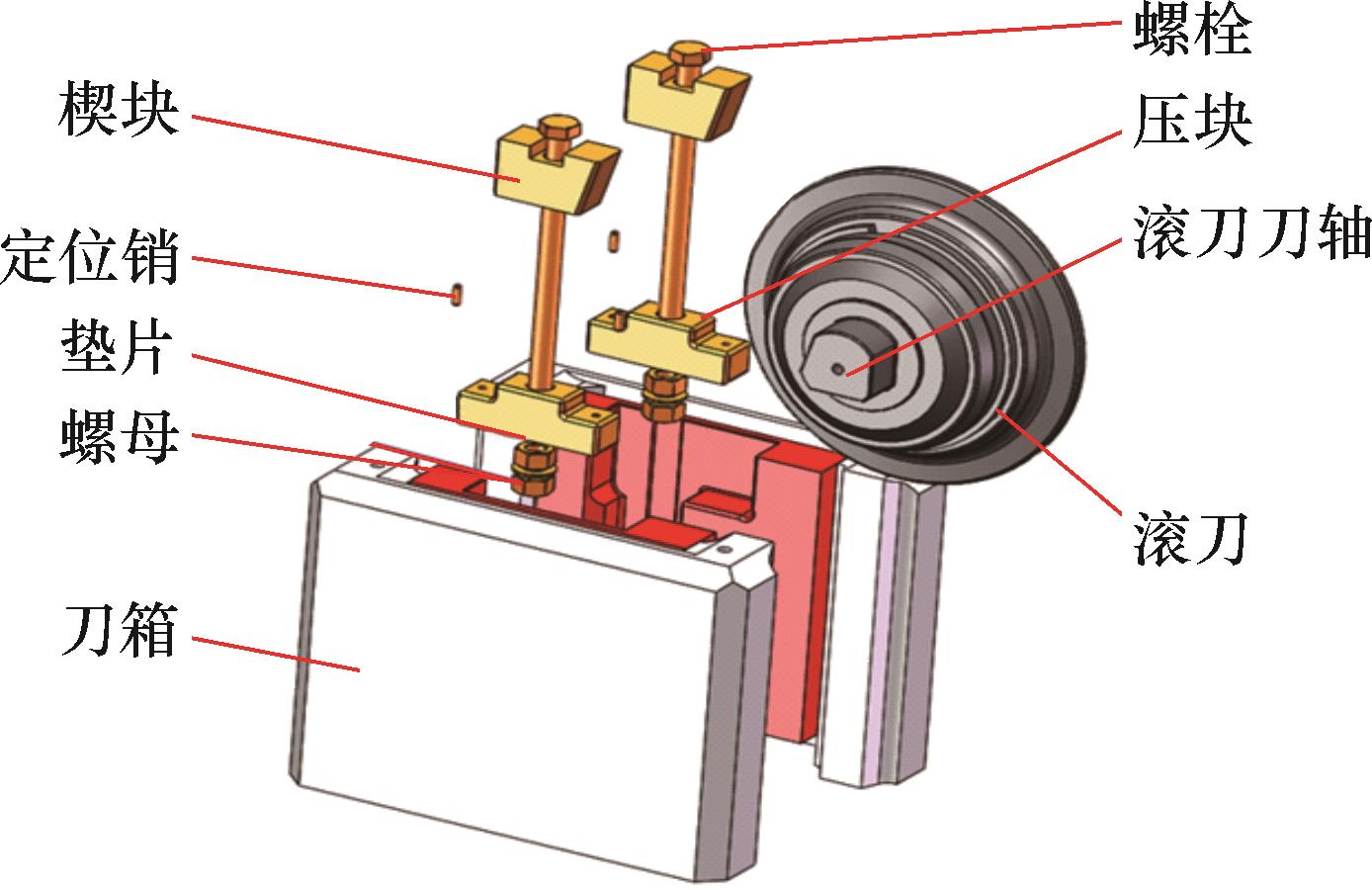
Fig.1 Structural diagram of traditional disccutter system
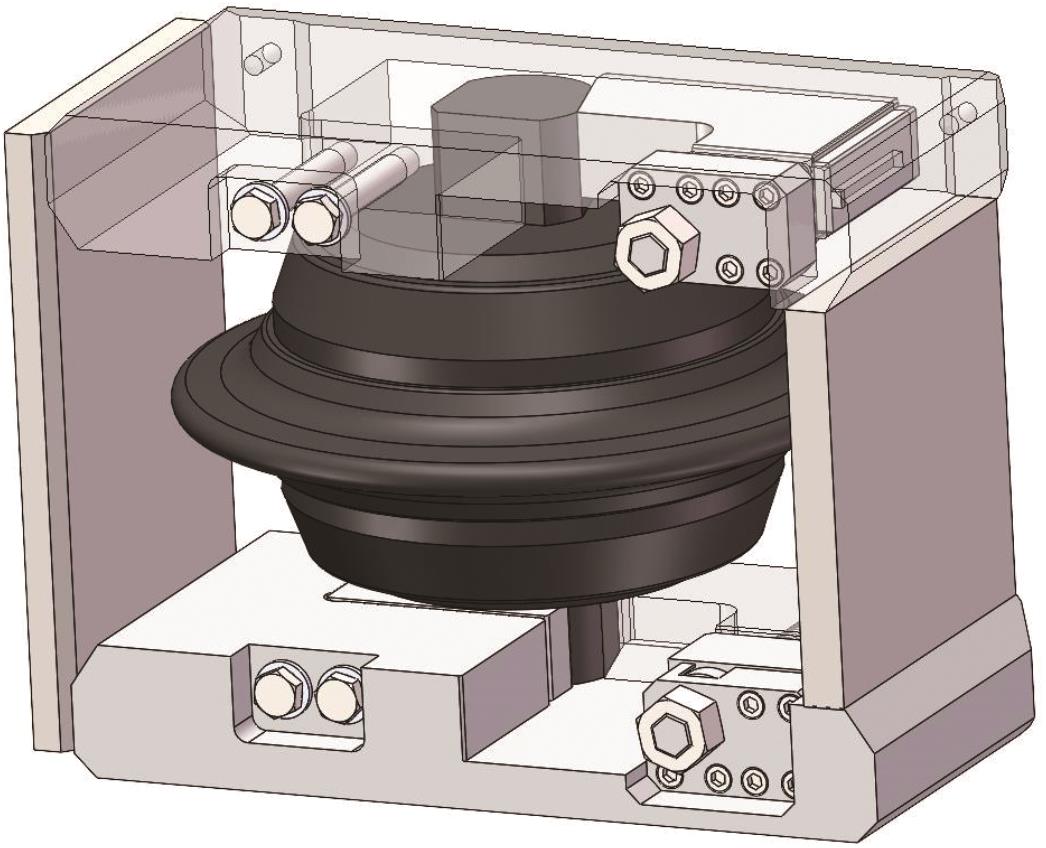
Fig.2 Design diagram of new disc cutter system
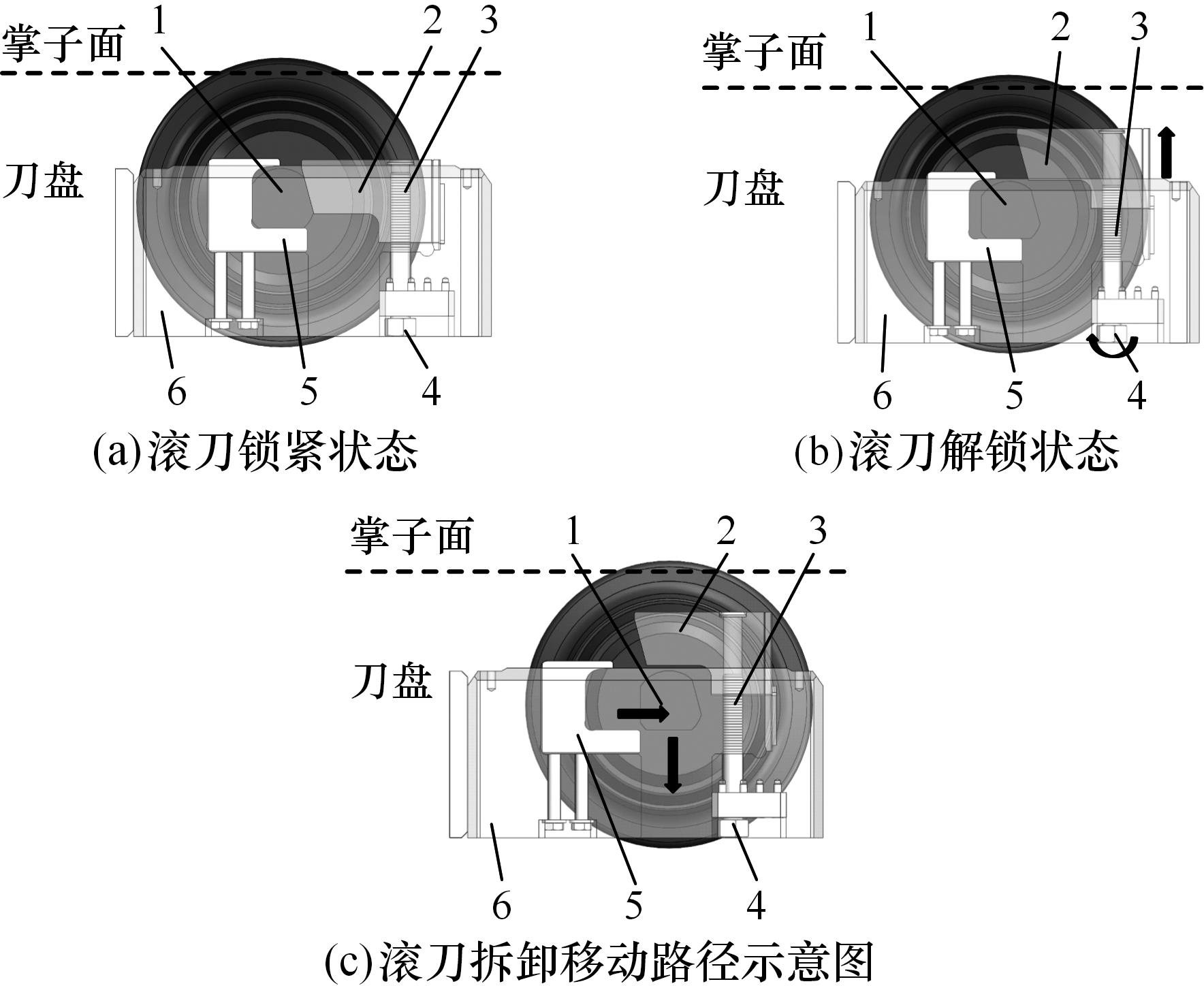
Fig.3 Schematic diagram of the structure and disassembly steps of new disc cutter system
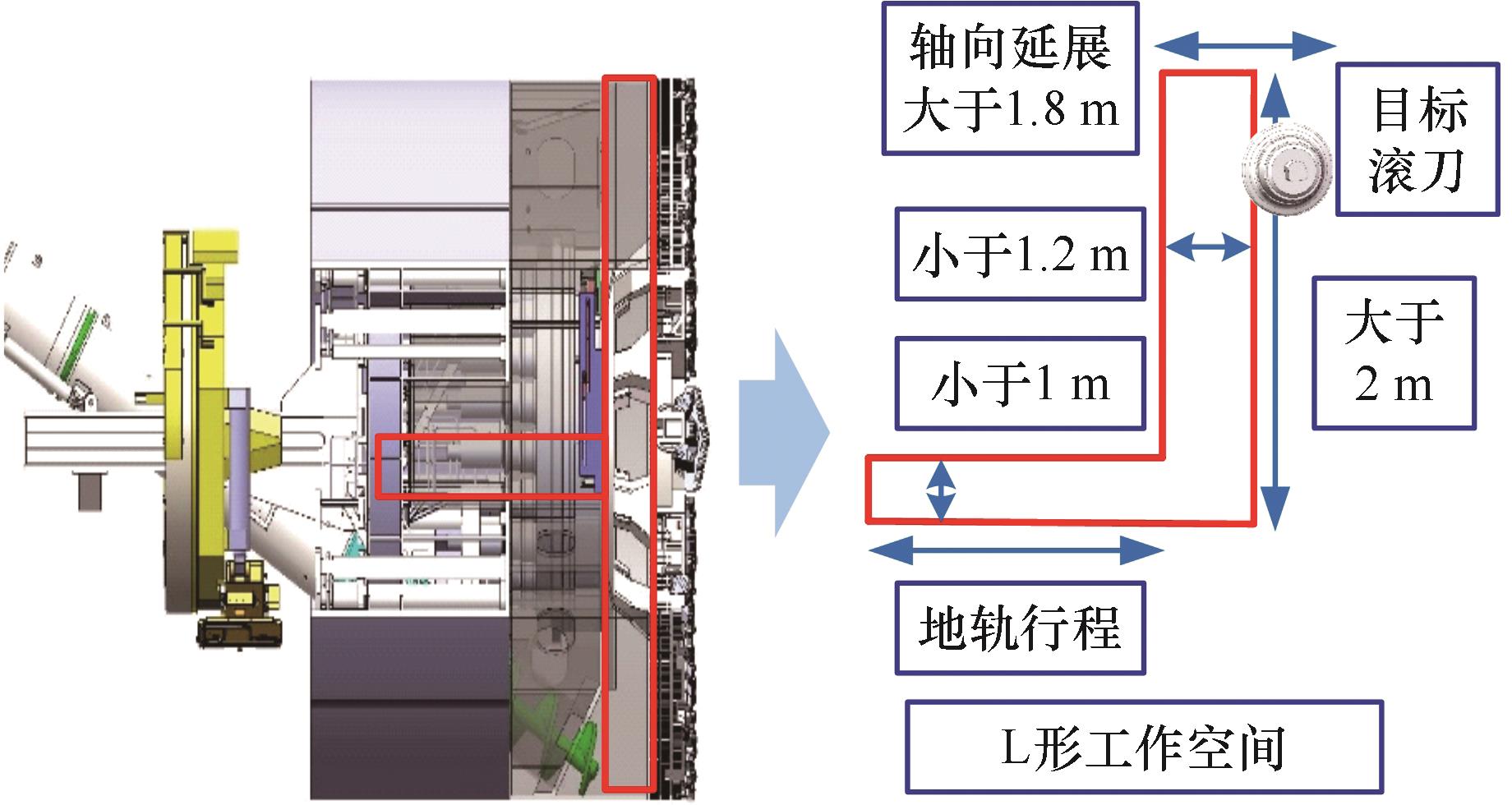
Fig.4 Installation and workspace extraction of disc cutter changing robot
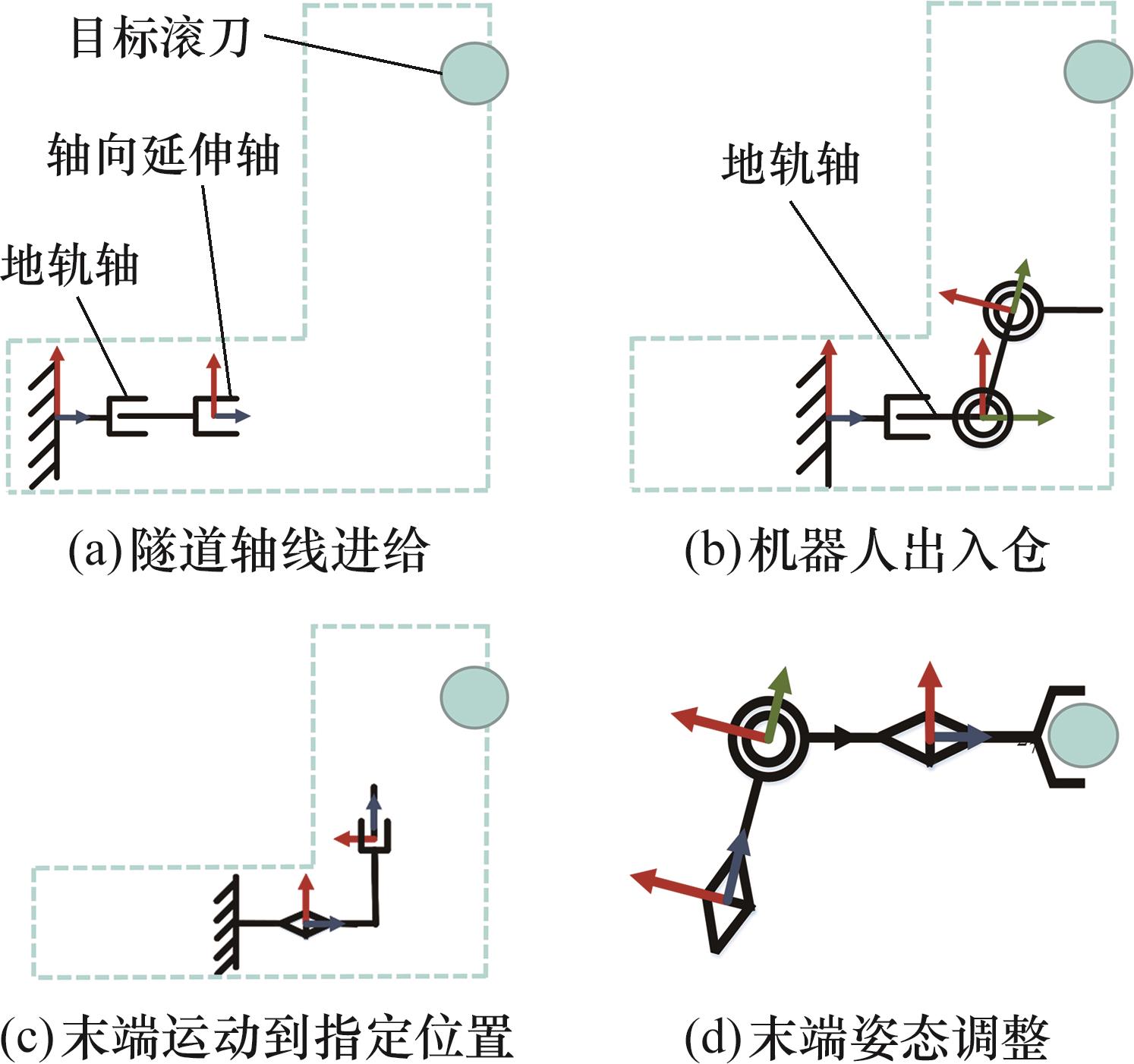
Fig.5 Diagram of requirement analysis for robot disc cutter changing action
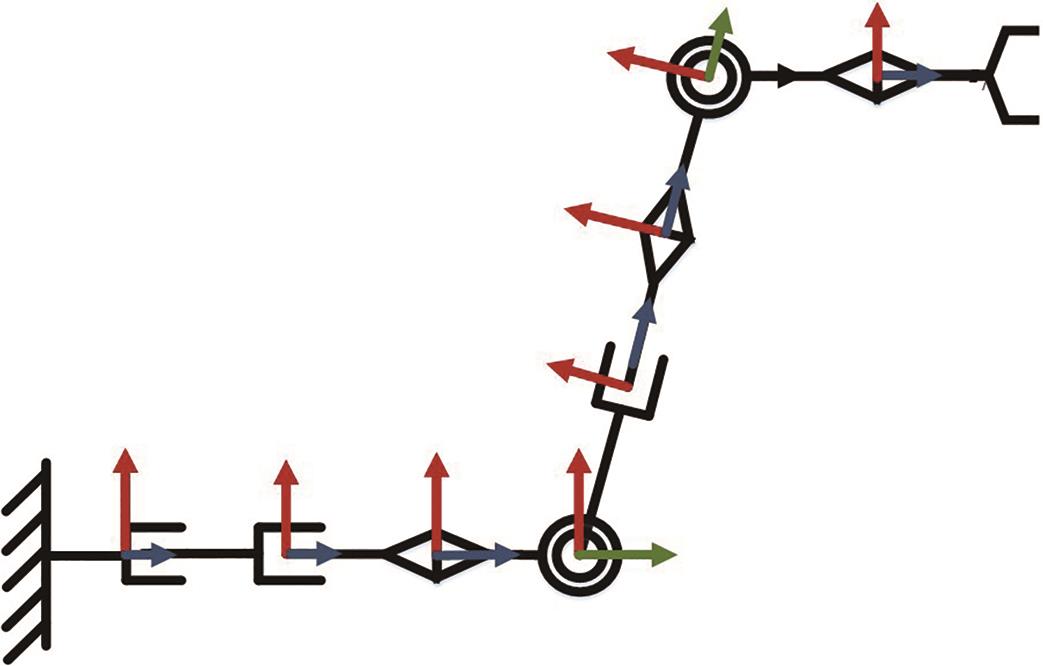
Fig.6 Schematic diagram of the final configuration of the disc cutter changing robot
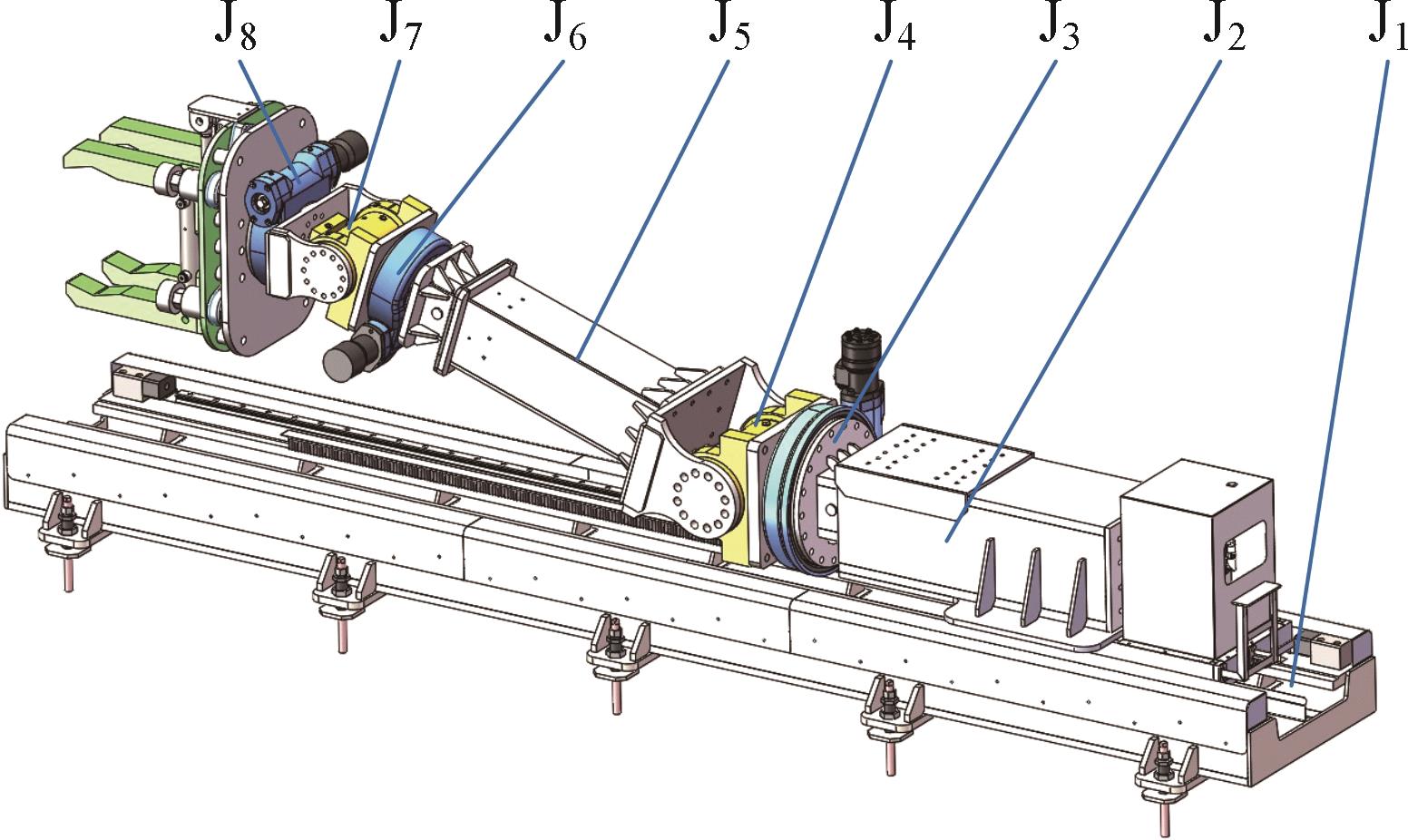
Fig.7 Sketch of disc cutter changing robot

Fig.8 Link coordinate system of disc cutter changing robot
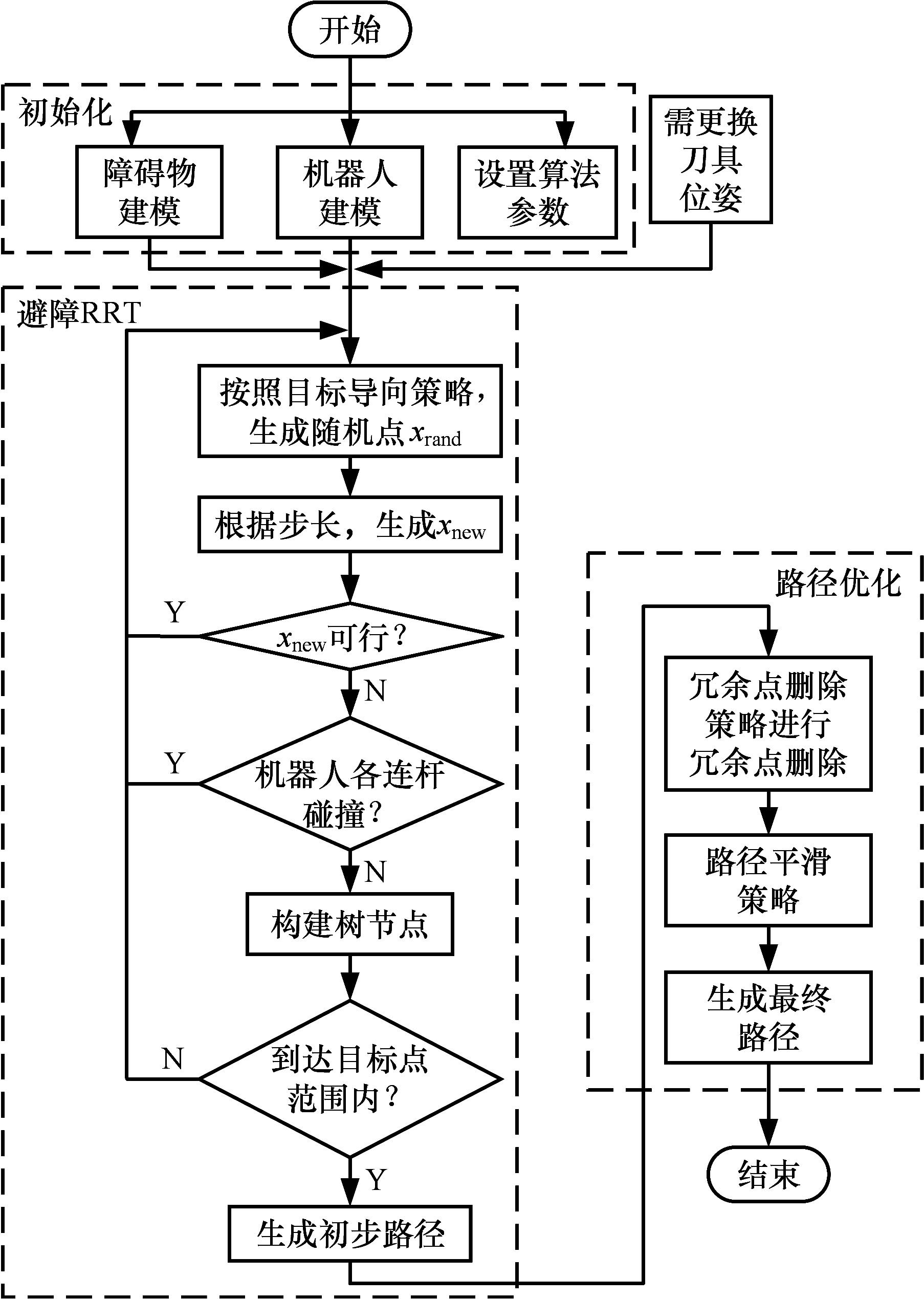
Fig.9 Flow chart of path planning algorithm
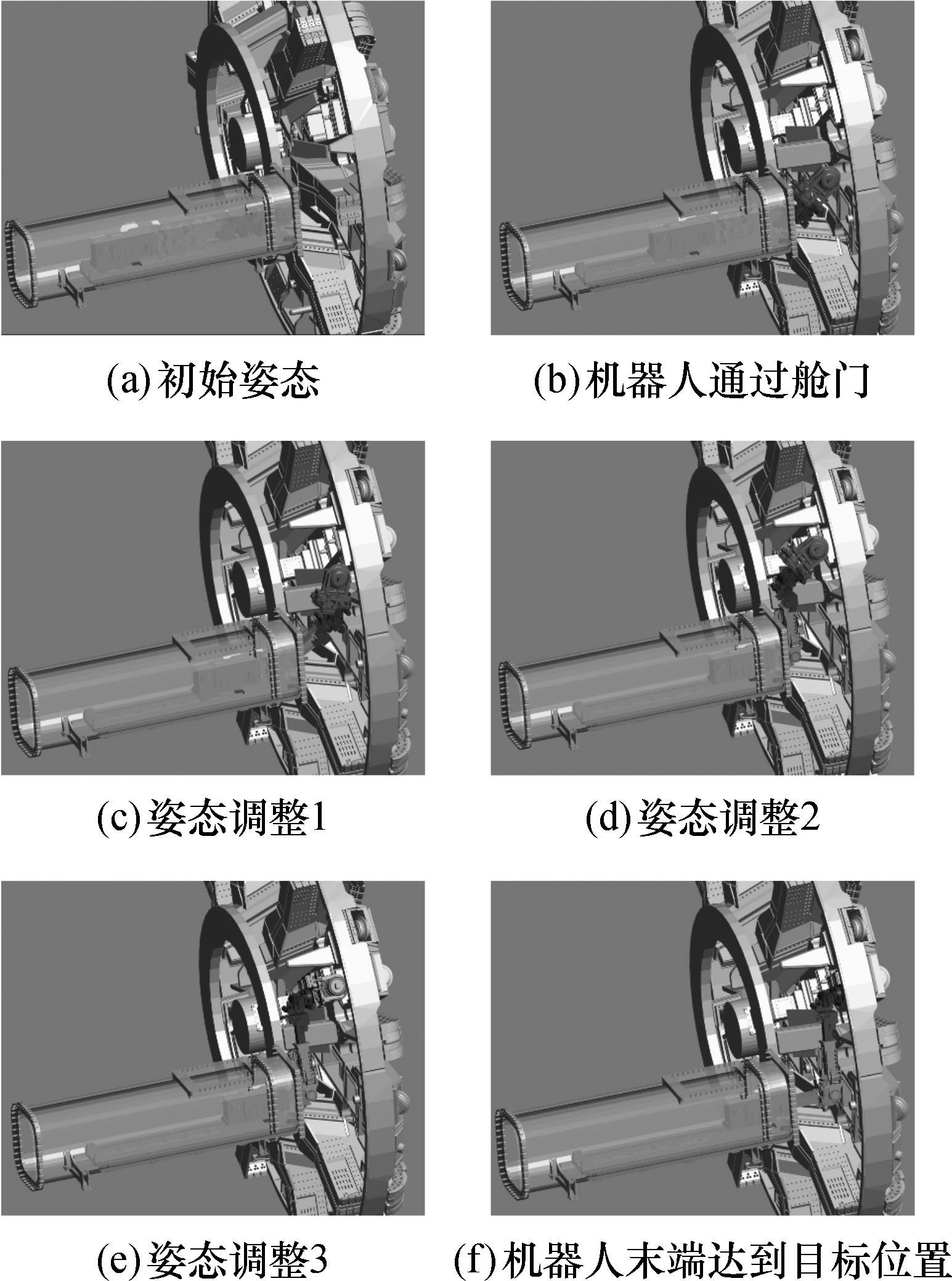
Fig.10 Simulation motion sequence diagram of disc cutter changing robot
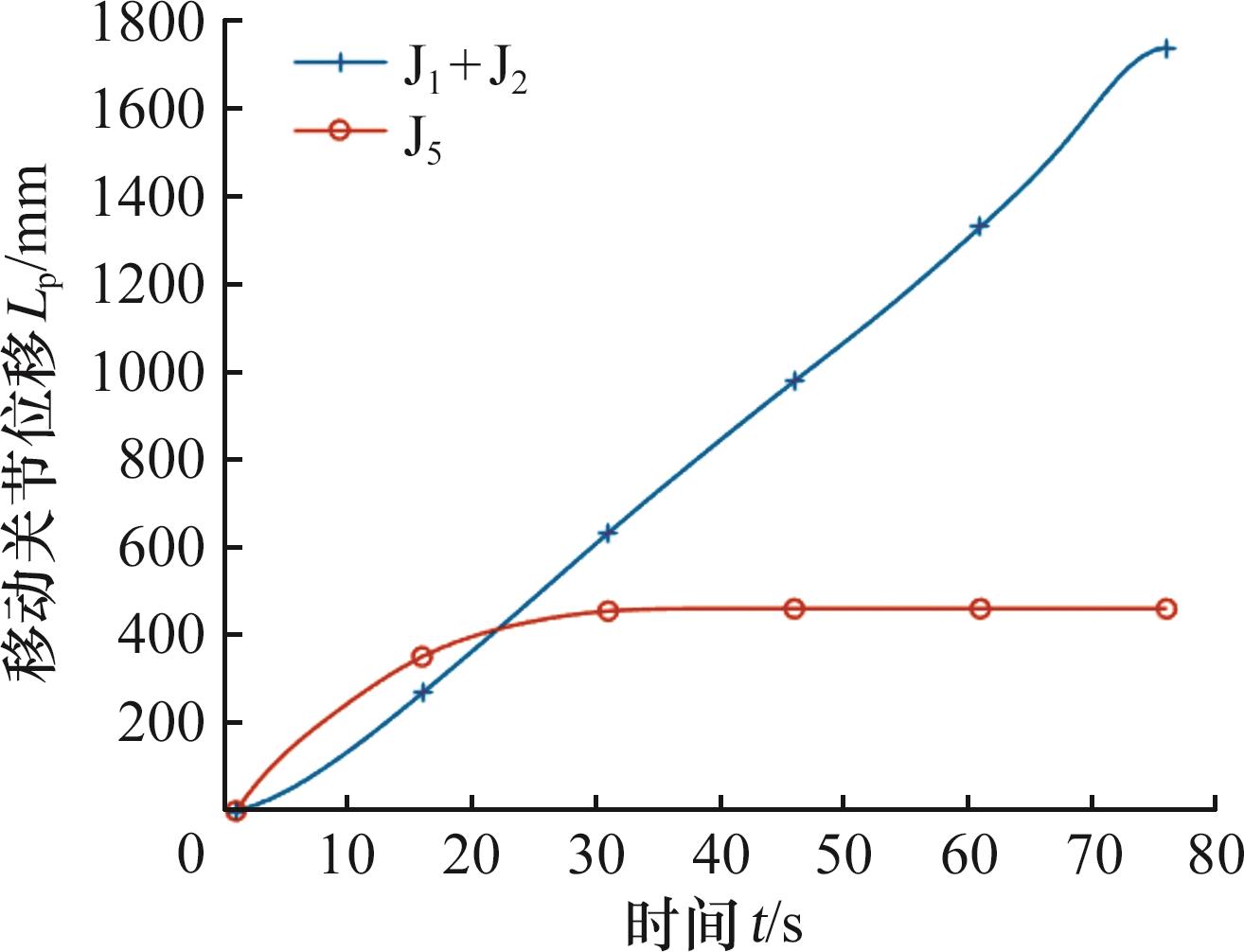
Fig.11 Change in position coordinates of prismatic joints
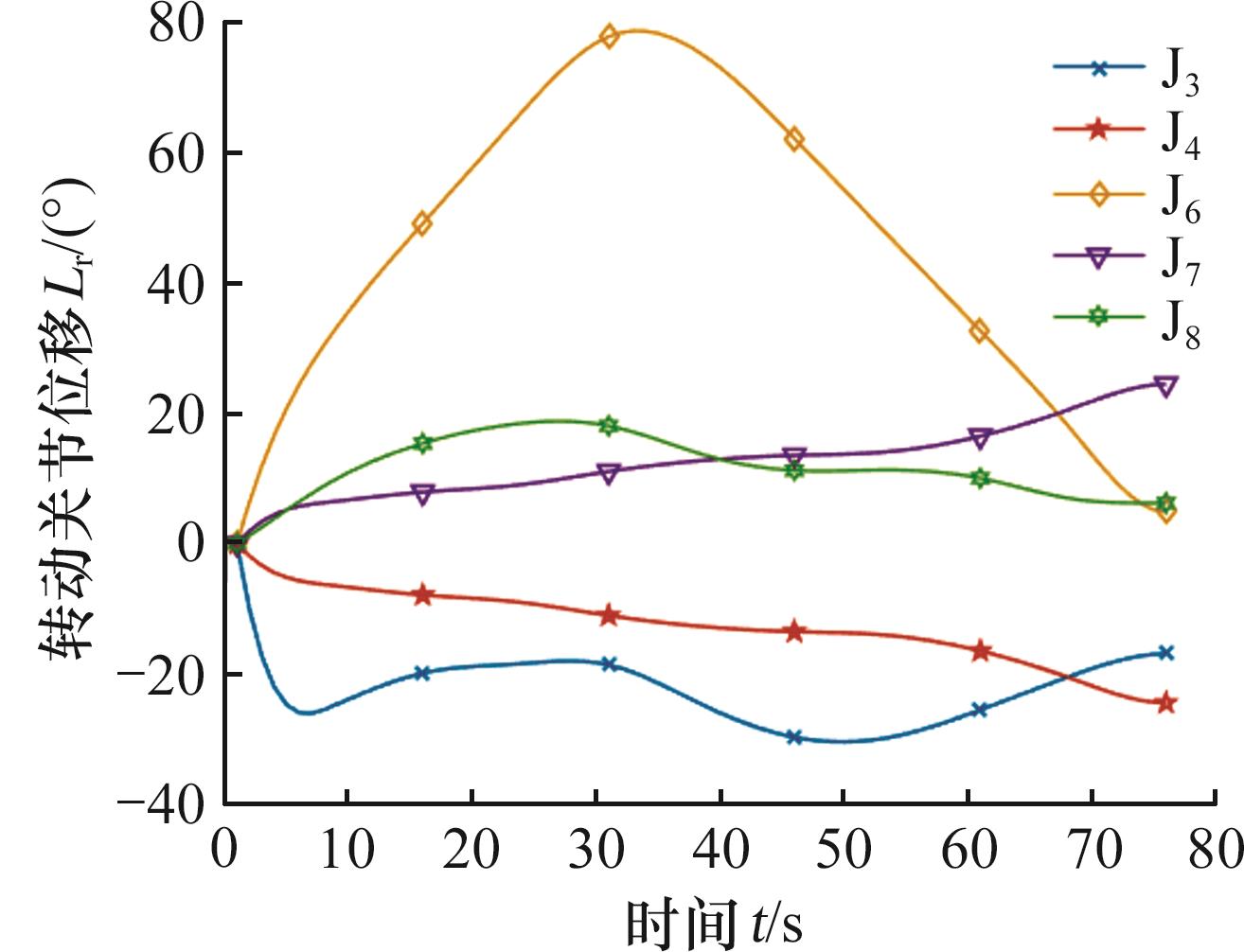
Fig.12 Change in position coordinates of rotary joints

Fig.13 Prototype of disc cutter changing robot
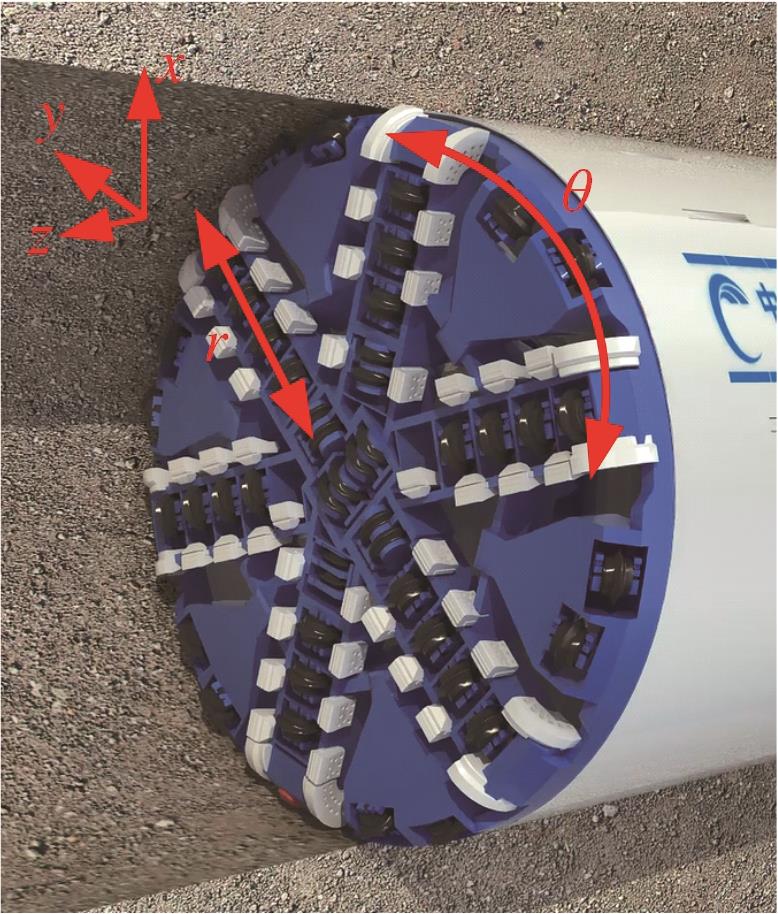
Fig.14 Diagram of cutterhead movement
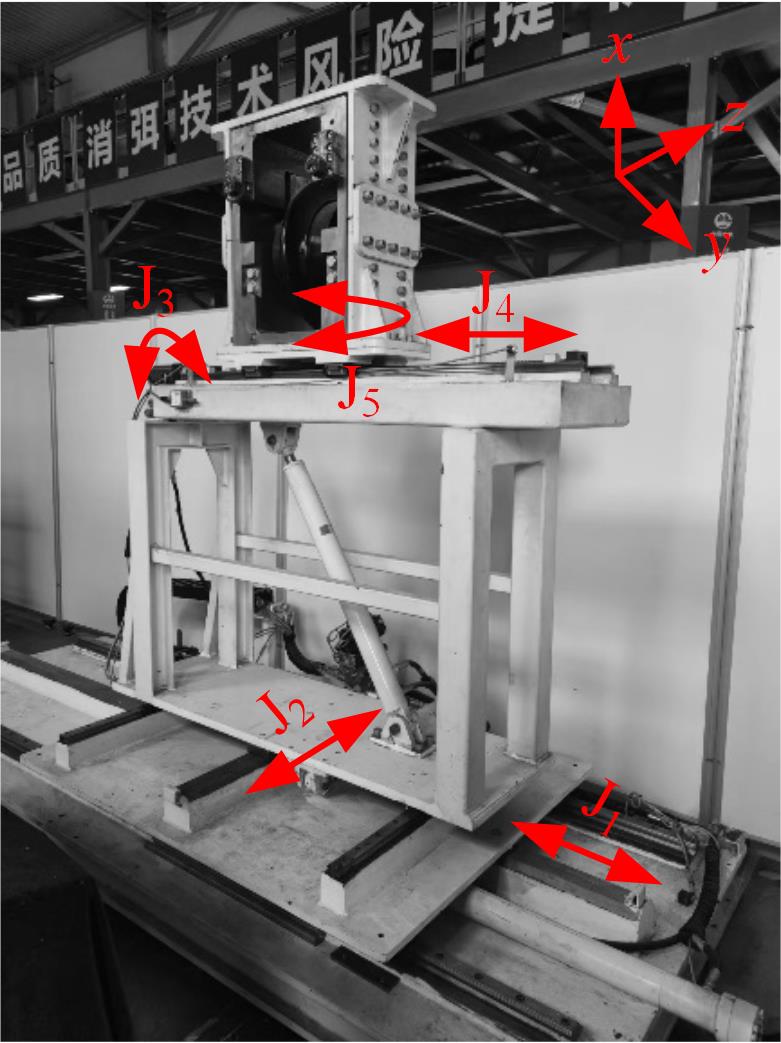
Fig.15 Disc cutter syster simulation test bench
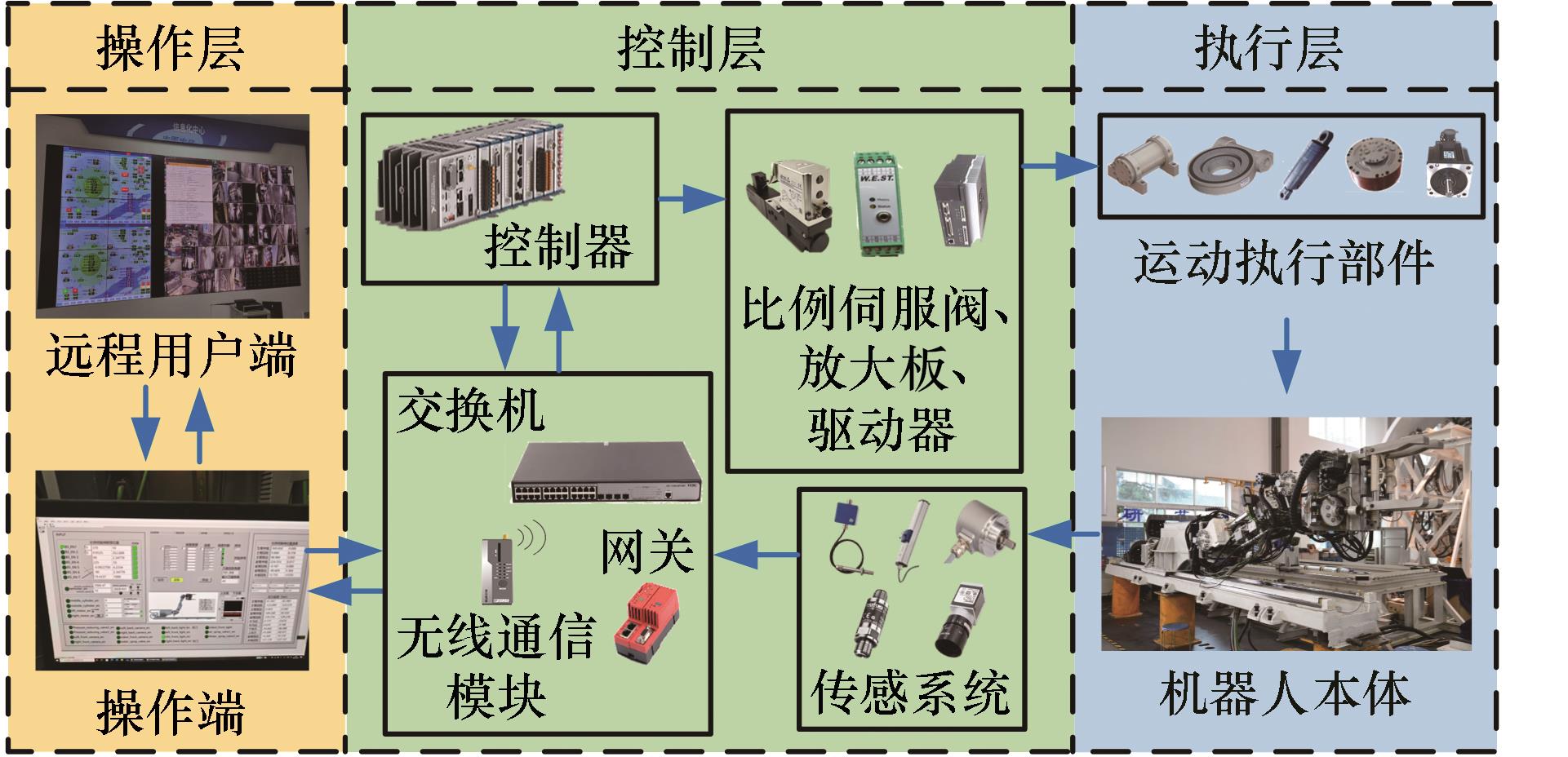
Fig.16 Schematic diagram of disc cutter changing robot control system
| 序号 | 参数 | 数值 |
|---|---|---|
| 1 | 机器人臂展范围/m | 0~3.5 |
| 2 | 机器人最大负载能力/kg | 500 |
| 3 | 机器人自由度 | 8 |
| 4 | 模拟试验台自由度 | 5 |
| 5 | 可模拟刀盘直径/m | 8~15 |
| 6 | 机器人存储空间截面尺寸/(m×m) | 0.9×0.9 |
Tab.1 Parameter table for prototype of disc cutter changing robot and cutter posture simulation test bench
| 序号 | 参数 | 数值 |
|---|---|---|
| 1 | 机器人臂展范围/m | 0~3.5 |
| 2 | 机器人最大负载能力/kg | 500 |
| 3 | 机器人自由度 | 8 |
| 4 | 模拟试验台自由度 | 5 |
| 5 | 可模拟刀盘直径/m | 8~15 |
| 6 | 机器人存储空间截面尺寸/(m×m) | 0.9×0.9 |
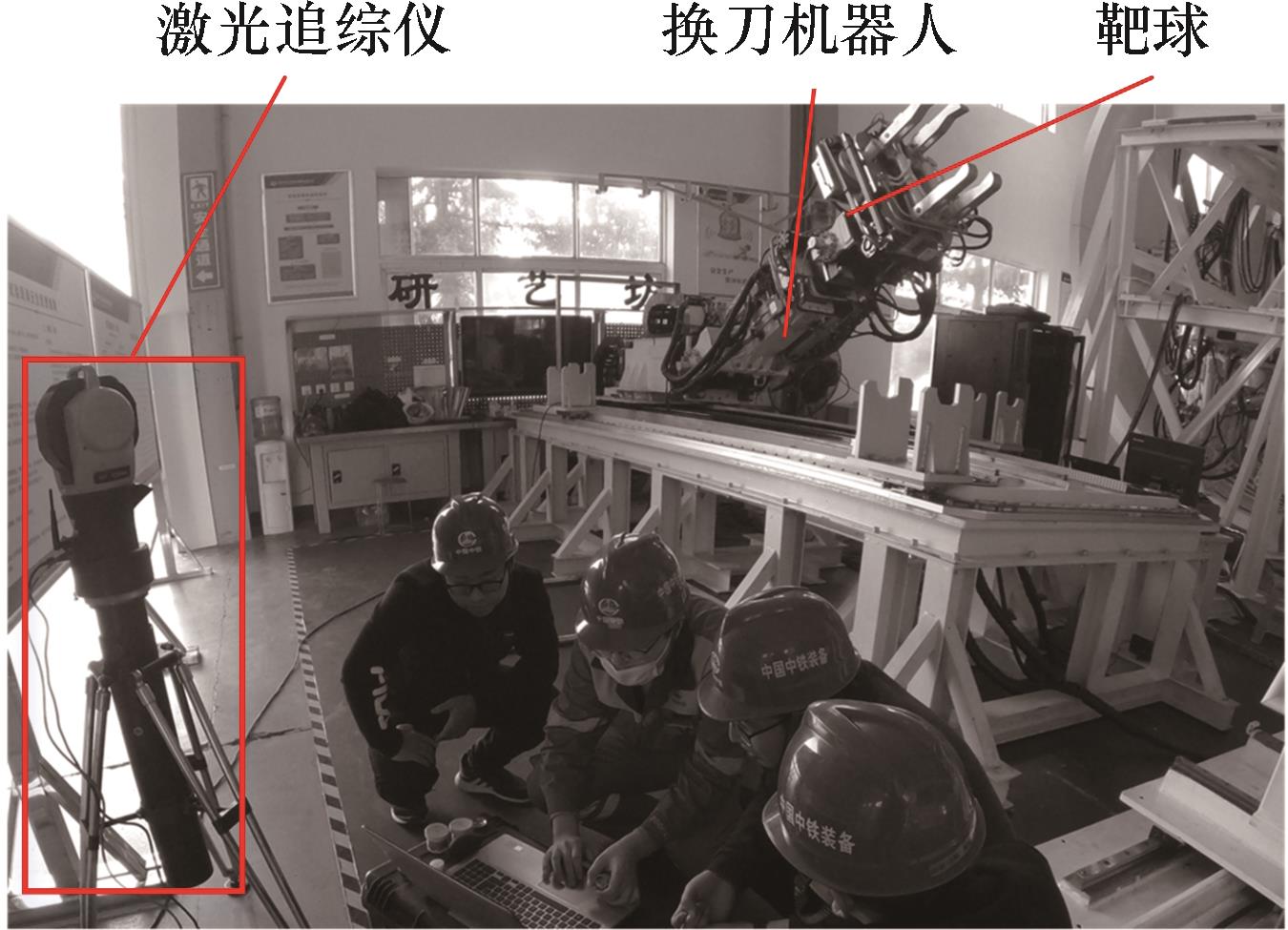
Fig.17 Parameter calibration of disc cutter changing robot
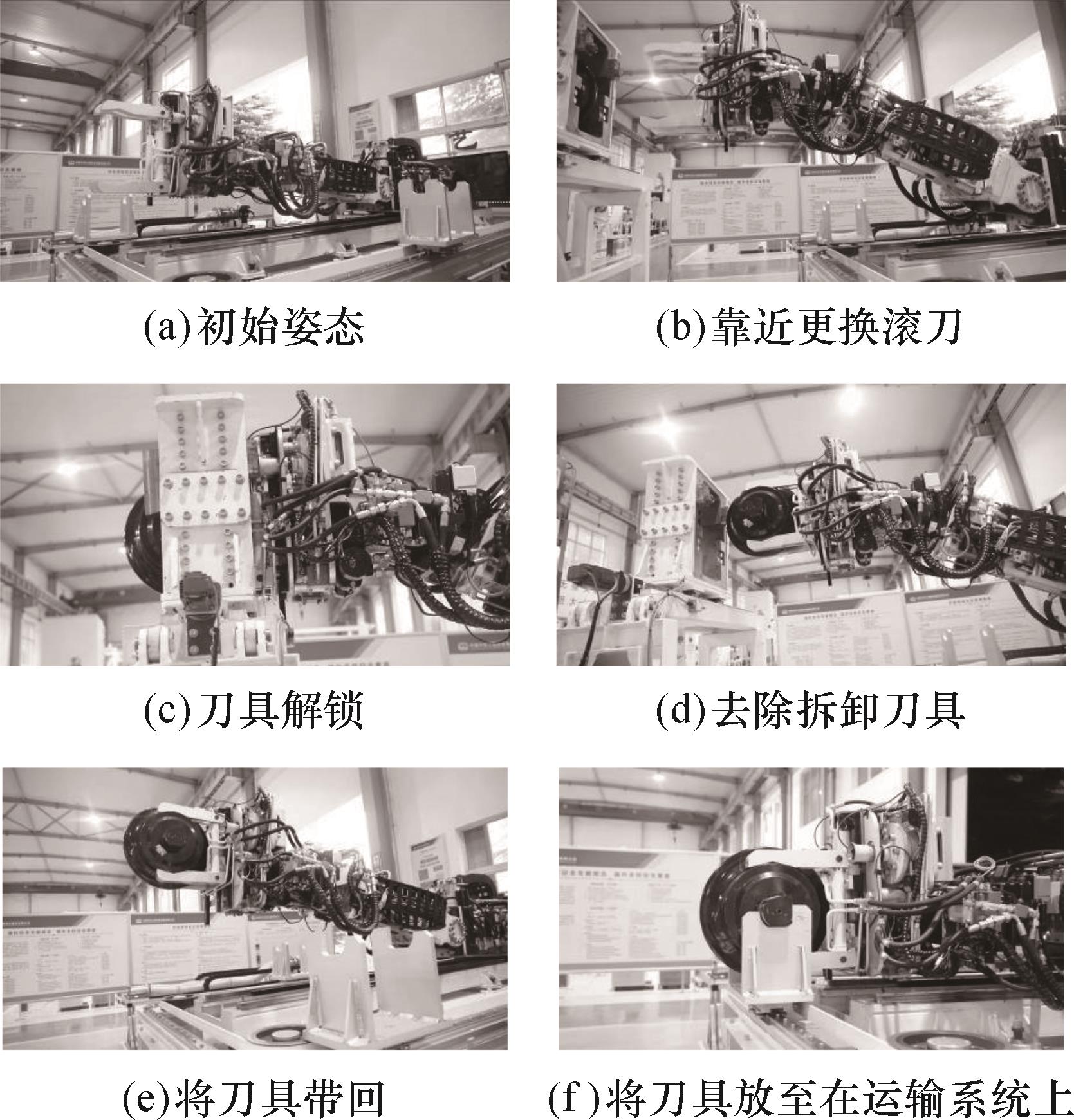
Fig.18 Motion Sequence diagram of the disc cutter changing robot during indoor experiment
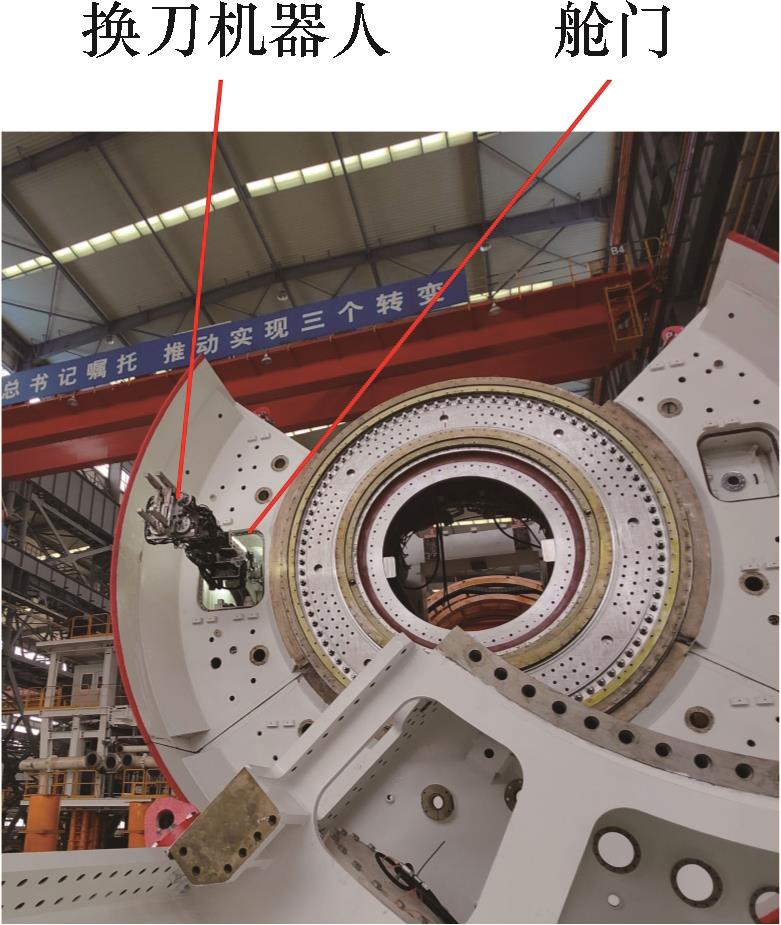
Fig.19 Engineering assembly of the disc cutter changing robot
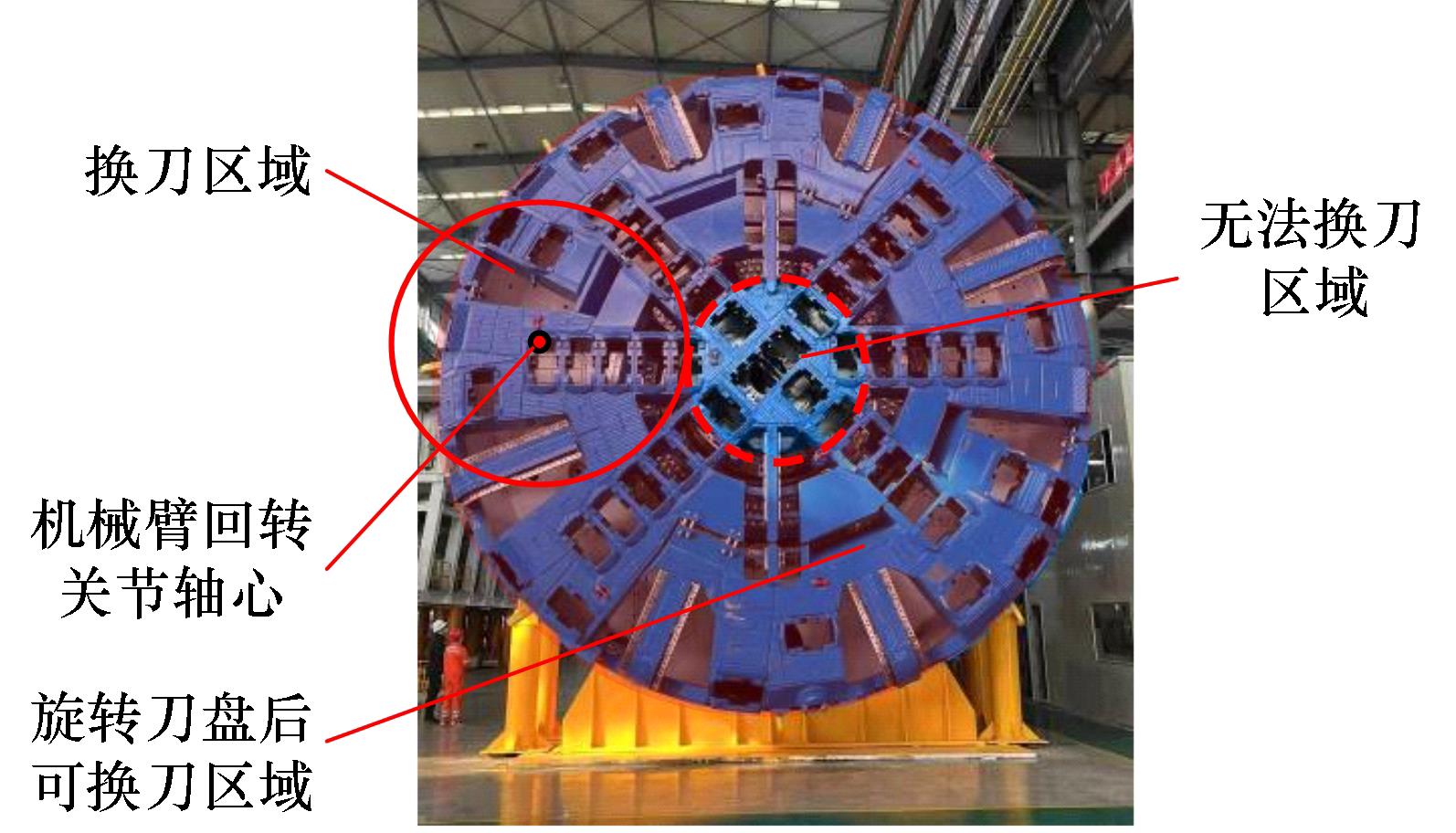
Fig.20 Schematic diagram of the tool changing area of the disc cutter changing robot
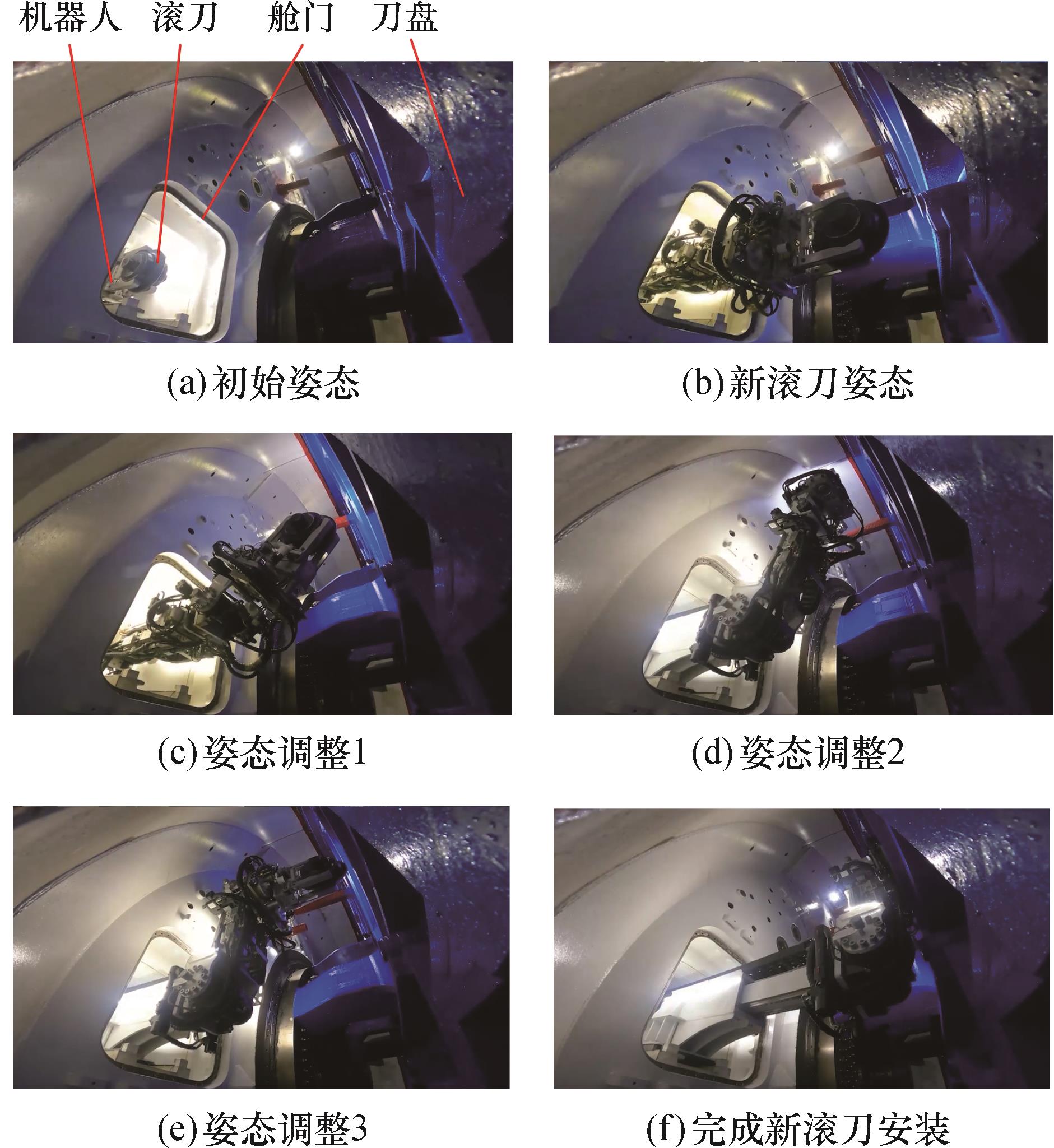
Fig.21 Disc cutter changing test of disc cutter changing robot in a real project
| [1] | HUANG Xing, LIU Quansheng, SHI Kai, et al. Application and Prospect of Hard Rock TBM for Deep Roadway Construction in Coal Mines[J]. Tunnelling and Underground Space Technology, 2018, 73: 105-126. |
| [2] | 司景钊, 曾云川, 刘建兵. 复杂地质铁路隧道敞开式TBM施工挑战及思考[J]. 隧道建设(中英文), 2021, 41(3): 433-440. |
| SI Jingzhao, ZENG Yunchuan, LIU Jianbing. Challenges and Some Thoughts on Open-TBM Construction in a Railway Tunnel with Complex Geologies[J]. Tunnel Construction, 2021, 41(3): 433-440. | |
| [3] | 贾连辉, 李晓科, 袁文征, 等. 基于拓扑优化和Kriging模型的前中盾结构轻量化设计[J]. 中国机械工程, 2022, 33(23): 2888-2897. |
| JIA Lianhui, LI Xiaoke, YUAN Wenzheng, et al. Lightweight Design of Front and Middle Shield Structures Based on Topology Optimization and Kriging Model[J]. China Mechanical Engineering, 2022, 33(23): 2888-2897. | |
| [4] | YUAN J, GUAN R, GUO D, et al. Discussion on the Robotic Approach of Disc Cutter Replacement for Shield Machine[C]∥2020 IEEE International Conference on Real-time Computing and Robotics(RCAR). Asahikawa, 2020: 204-209. |
| [5] | 杜立杰. 中国TBM施工技术进展、挑战及对策[J]. 隧道建设, 2017, 37(9): 1063-1075. |
| DU Lijie. Progresses, Challenges and Countermeasures for TBM Construction Technology in China[J]. Tunnel Construction, 2017, 37(9): 1063-1075. | |
| [6] | CAMUS T, MOUBARAK S. Maintenance Robotics in TBM Tunnelling[C]∥32nd International Symposium on Automation and Robotics in Construction and Mining (ISARC 2015).Oulu, 2015:1-8. |
| [7] | DERYCKE J N, RUBRECHT S. Method for Replacing a Tunnel Boring Machine Roller Cutter, Handling Device and Roller Cutter Suited to such a Method: US20130045055[P]. 2013-02-21. |
| [8] | NeTTun: New Technologies for Tunnelling and Underground Works[EB/OL]. [2025-12-02]. . |
| [9] | 董德鹏. 盾构机换刀机器人增量式数字阀控液压伺服技术研究[D]. 沈阳: 东北大学, 2020. |
| DONG Depeng. Research on Incremental Digital Valve Control Hydraulic Servo Technology for TBM Cutter Changing Robot[D]. Shenyang: Northeastern University, 2020. | |
| [10] | YANG Mei, ZENG Guiying, REN Yong, et al. Accessibility and Trajectory Planning of Cutter Changing Robot Arm for Large-diameter Slurry Shield[J]. Mechanics, 2023, 29(3): 214-224. |
| [11] | DU Liang, YUAN Jianjun, BAO Sheng, et al. Robotic Replacement for Disc Cutters in Tunnel Boring Machines[J]. Automation in Construction, 2022, 140: 104369. |
| [12] | 张海东, 黄磊, 霍军周. TBM换刀机器人的设计分析与运动控制[J]. 应用基础与工程科学学报, 2021, 29(5): 1234-1244. |
| ZHANG Haidong, HUANG Lei, HUO Junzhou. Design and Motion Control of Disc Cutter Changing Robot for TBM[J]. Journal of Basic Science and Engineering, 2021, 29(5): 1234-1244. | |
| [13] | 吕浩伟. 盾构机辅助换刀机器人机构设计及其定位精度分析[D]. 济南: 山东大学, 2023. |
| Haowei LYU. Mechanism Design and Positioning Accuracy Analysis of Shield Assisted Tool Change Robot[D]. Jinan: Shandong University, 2023. | |
| [14] | 钱文学, 宋帅, 李昊, 等. 基于混合样条曲线的换刀机器人换刀轨迹规划研究[J]. 东北大学学报(自然科学版), 2021, 42(10): 1427-1434. |
| QIAN Wenxue, SONG Shuai, LI Hao, et al. Research on Tool-changing Trajectory Planning of Tool-changing Robots Based on Hybrid Spline Curves[J]. Journal of Northeastern University(Natural Science), 2021, 42(10): 1427-1434. | |
| [15] | 陶治同, 陶建峰, 覃程锦, 等. 基于时间冲击最优的TBM换刀机器人轨迹规划[J]. 浙江大学学报(工学版), 2023, 57(1): 1-9. |
| TAO Zhitong, TAO Jianfeng, QIN Chengjin, et al. Trajectory Planning of TBM Disc Cutter Changing Robot Based on Time-jerk Optimization[J]. Journal of Zhejiang University (Engineering Science), 2023, 57(1): 1-9. | |
| [16] | 殷光淼, 朱国力, 谢哲, 等. 基于数字孪生的盾构机换刀机器人监控系统[J]. 计算机集成制造系统, 2024, 30(3): 811-824. |
| YIN Guangmiao, ZHU Guoli, XIE Zhe, et al. Monitoring System for Shield Machine Tool Changing Robot Based on Digital Twin[J]. Computer Integrated Manufacturing Systems, 2024, 30(3): 811-824. | |
| [17] | 刘四进, 马浴阳, 王华伟, 等. TBM换刀机器人新型刀具系统设计分析[J]. 隧道建设(中英文), 2024, 44(10): 2094-2102. |
| LIU Sijin, MA Yuyang, WANG Huawei, et al. Design and Analysis of a Novel Cutter System for a Cutter-changing Robot in Tunnel Boring Machines[J]. Tunnel Construction, 2024, 44(10): 2094-2102. | |
| [18] | MENG Z, YANG D, HUO J, et al. Development and Performance Evaluation of an Integrated Disc Cutter System for TBMS[J]. Applied Sciences, 2021, 11(2): 644. |
| [19] | 杨冬建. 基于双目视觉的TBM换刀机器人末端定位研究[D]. 大连: 大连理工大学, 2021. |
| YANG Dongjian. Study on End Positioning of TBM Cutter Changing Robot Based on Binocular Vision[D]. Dalian: Dalian University of Technology, 2021. | |
| [20] | 郭俊可, 王杜娟. 基于视觉导航定位的盾构机器人换刀技术研究[J]. 隧道建设(中英文), 2021, 41(2): 300-307. |
| GUO Junke, WANG Dujuan. Research on Cutter-replacement Technology for Shield Machine Using Robot Based on Visual Navigation Positioning[J]. Tunnel Construction, 2021, 41(2): 300-307. | |
| [21] | 张意龙. 狭窄空间下的盾构机刀盘缺陷检测与换刀机器人路径规划研究[D]. 哈尔滨: 哈尔滨理工大学, 2025. |
| ZHANG Yilong. Defect Detection of Shield Cutter Plate and Path Planning of Tool-changing Robot in Narrow Space[D]. Harbin: Harbin University of Science and Technology, 2025. | |
| [22] | 张志文, 刘伯威, 张继园, 等. 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划[J]. 中国机械工程, 2024, 35(6): 993-999. |
| ZHANG Zhiwen, LIU Bowei, ZHANG Jiyuan, et al. Cooperative Optimization of Intelligent Vehicle Path Planning Based on PSO-SSA and RRT[J]. China Mechanical Engineering, 2024, 35(6): 993-999. |
| [1] | WANG Xuhao, SHENG Wolong, WU Mengli, XU Yilong, ZHAO Xiaowei, CAO Yiran. Design and Kinematics Modeling of Extensible Snake-like Manipulators [J]. China Mechanical Engineering, 2025, 36(12): 2885-2893. |
| [2] | Xinyao TANG, Rong YIN, Xupeng WANG, Jiayin YANG, Xiaoyi LIU, Yuyang HAO. Design and Optimization of Human-machine Compatibility of Knee-ankle Exoskeletons [J]. China Mechanical Engineering, 2025, 36(10): 2369-2378. |
| [3] | CHAI Rongxia1, JIANG Xiaoyuan1, WANG Qinsheng2, YU Zhengyang3, LONG Xue1, LIU Jun1. Research and Device Design of Coal Mine Mechanical Impact Behaviors Based on Energy Distribution Principle [J]. China Mechanical Engineering, 2024, 35(09): 1584-1596. |
| [4] | ZHANG Luo1, LIU Mingming2, CHEN Ruimin1, DAN Peng1, GUO Nan1. Simulation and Experimental Study of Deformation Control of Large-size and Thin-wall Parts by SLM [J]. China Mechanical Engineering, 2024, 35(09): 1653-1658,1709. |
| [5] | ZHU Sipei, FU Guoqiang, ZHENG Yue, LI Zhengtang, YANG Jixiang. Universal Surface Texture Modeling Method for Five-axis Surface Milling [J]. China Mechanical Engineering, 2023, 34(16): 1946-1957. |
| [6] | LIU Yao, CHEN Gaige, LIU Zhenguo, KONG Xianguang, CHANG Jiantao. Health Assessment Method of Shield Machine Cutterheads Driven by Association Rule Mining [J]. China Mechanical Engineering, 2023, 34(11): 1326-1334,1342. |
| [7] | YANG Shuo, ZHANG Jie, KONG Ning, WANG Haowei, WANG Xiaoyu, ZHUANG Yuan. Deformation Law Model and Simulation Verification of Pod Structures with Large Exhibition-to-receive Ratio for Aerospace Applications [J]. China Mechanical Engineering, 2023, 34(07): 780-788. |
| [8] | ZHANG Ming, ZHI Pengpeng, HUO Wenbiao, LI Zhiyong. Research on Fracture Mechanism and Tests of Wheel Flange Lubrication Device Hangers for Metro Vehicles [J]. China Mechanical Engineering, 2022, 33(11): 1369-1376. |
| [9] | ZHENG Hongmei, ZHENG Mingrui, CHEN Ke, SHI Hongyang, YIN Lei, . Integral Double-layer Disc Permanent Magnet Eddy Current Coupling and Its Torque Characteristic Analysis [J]. China Mechanical Engineering, 2021, 32(20): 2395-2402. |
| [10] | ZHANG Heng, DING Xiaohong, SHEN Lei, XU Shipeng. Topology Optimization of Sandwich Damping Composite Structure with Connective Constraint [J]. China Mechanical Engineering, 2021, 32(20): 2403-2410. |
| [11] | LI Fangyi, QI Xiaoxia, LI Yanle, WANG Liming, DU Jiyu, XU Jingwei, MENG Xiaoning. Review on Repair Technologies for Key Part Remanufacturing of Shield Machines [J]. China Mechanical Engineering, 2021, 32(07): 820-831. |
| [12] | PENG Yuhui1;WU Zhizhou1;HUANG Yupeng1;LEI Xiangyu2. Structure Improvement on Two-stage CNG Pressure Regulators Based on Method of DOE [J]. China Mechanical Engineering, 2019, 30(20): 2512-2519. |
| [13] | CUI Guohua1;LIU Jian1;MA Liang2;CUI Kangkang1. Design and Mechanics Performance Analysis of a Concrete Pipe End Grinding Robot [J]. China Mechanical Engineering, 2019, 30(06): 665-671. |
| [14] | LIAO Wei1;ZHAO Yanming2;LIU Deshun1,3;JIN Yongping1,3. Active Heave Compensation Active Disturbance Rejection Control System of Electric Driven Marine Winchs [J]. China Mechanical Engineering, 2018, 29(24): 2999-3008. |
| [15] | ZHAO Xiaoyu, ZHANG Boming, LIAN Yilong, ZHANG Shuren. VARI Rapid Prototyping Processes for Battery Boxes of Composite Materials [J]. China Mechanical Engineering, 2018, 29(21): 2565-2570,2580. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||