ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (11): 2652-2657.DOI: 10.3969/j.issn.1004-132X.2025.11.021
梁海平1,2,3,4( ), 卢耀安1,2,3,4(), 连伟嘉1,2,3,4, 王成勇1,2,3,4
), 卢耀安1,2,3,4(), 连伟嘉1,2,3,4, 王成勇1,2,3,4
Haiping LIANG1,2,3,4(), Yaoan LU1,2,3,4(), Weijia LIAN1,2,3,4, Chengyong WANG1,2,3,4
摘要:
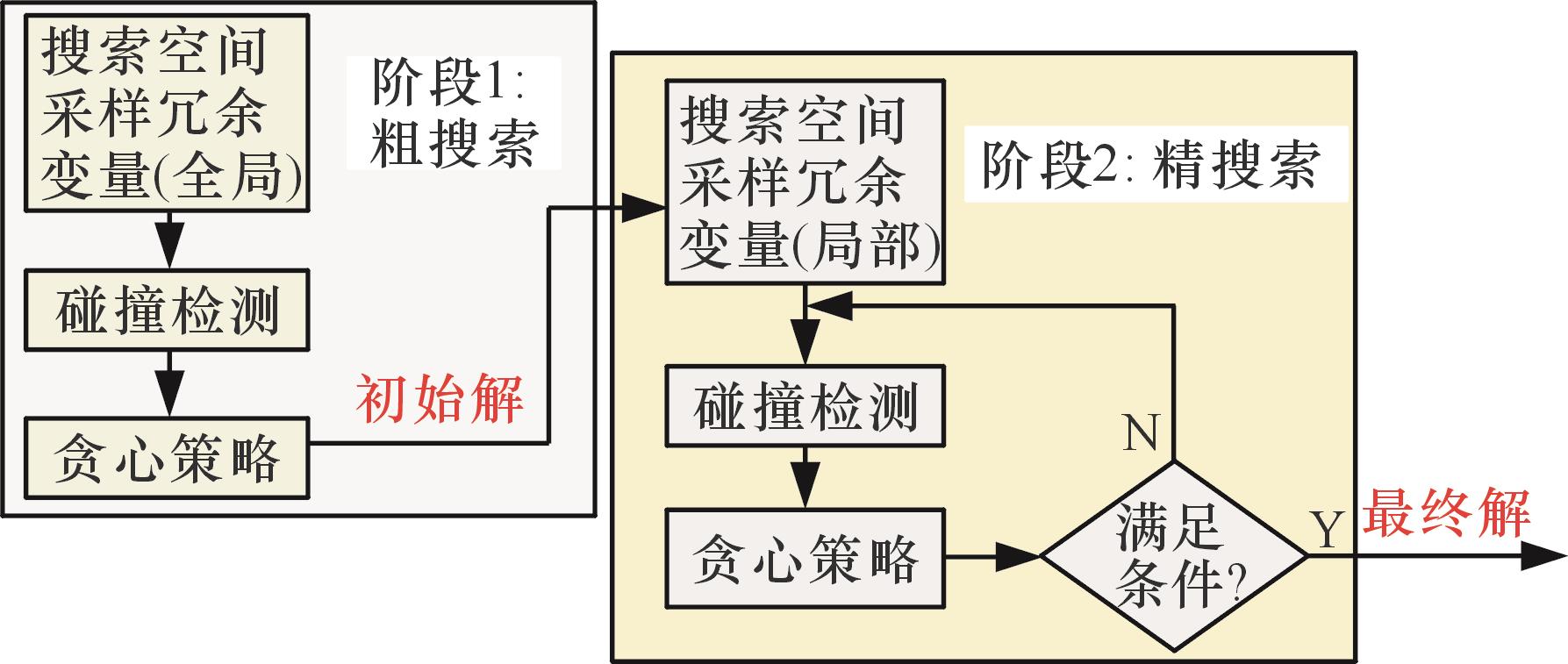
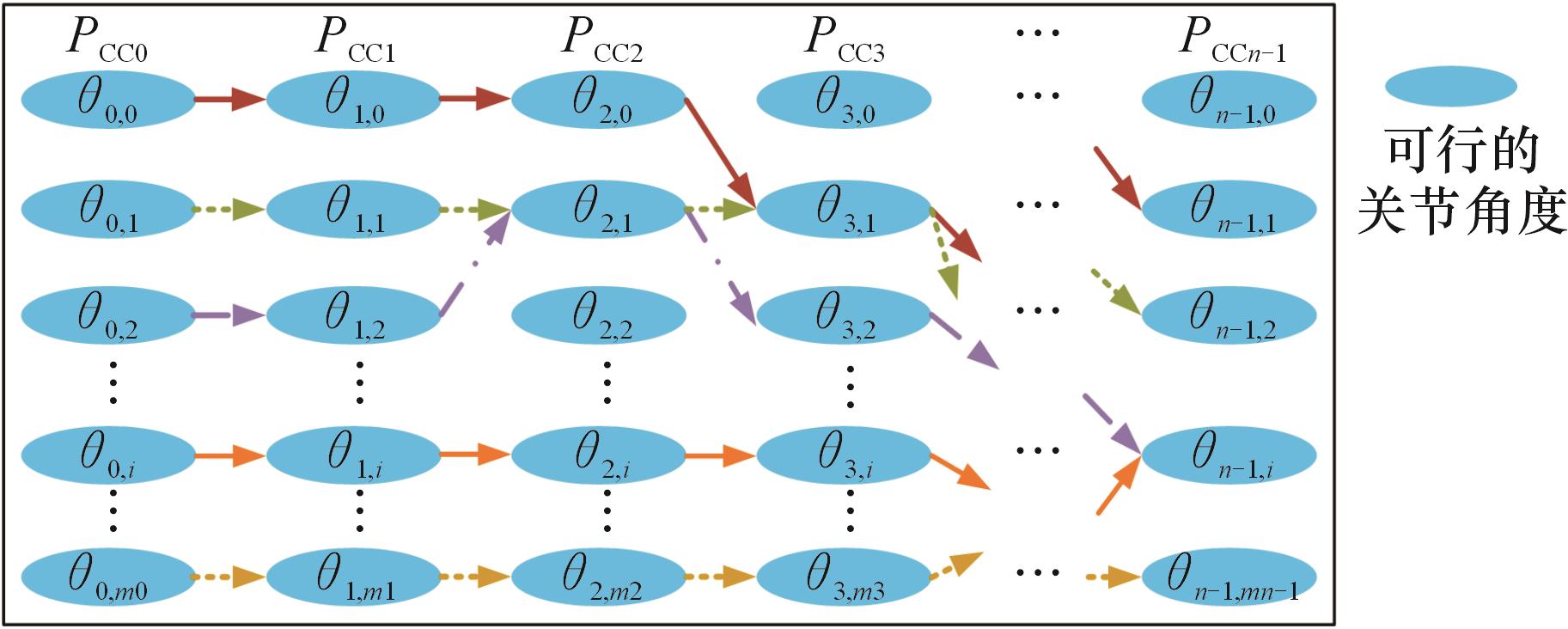
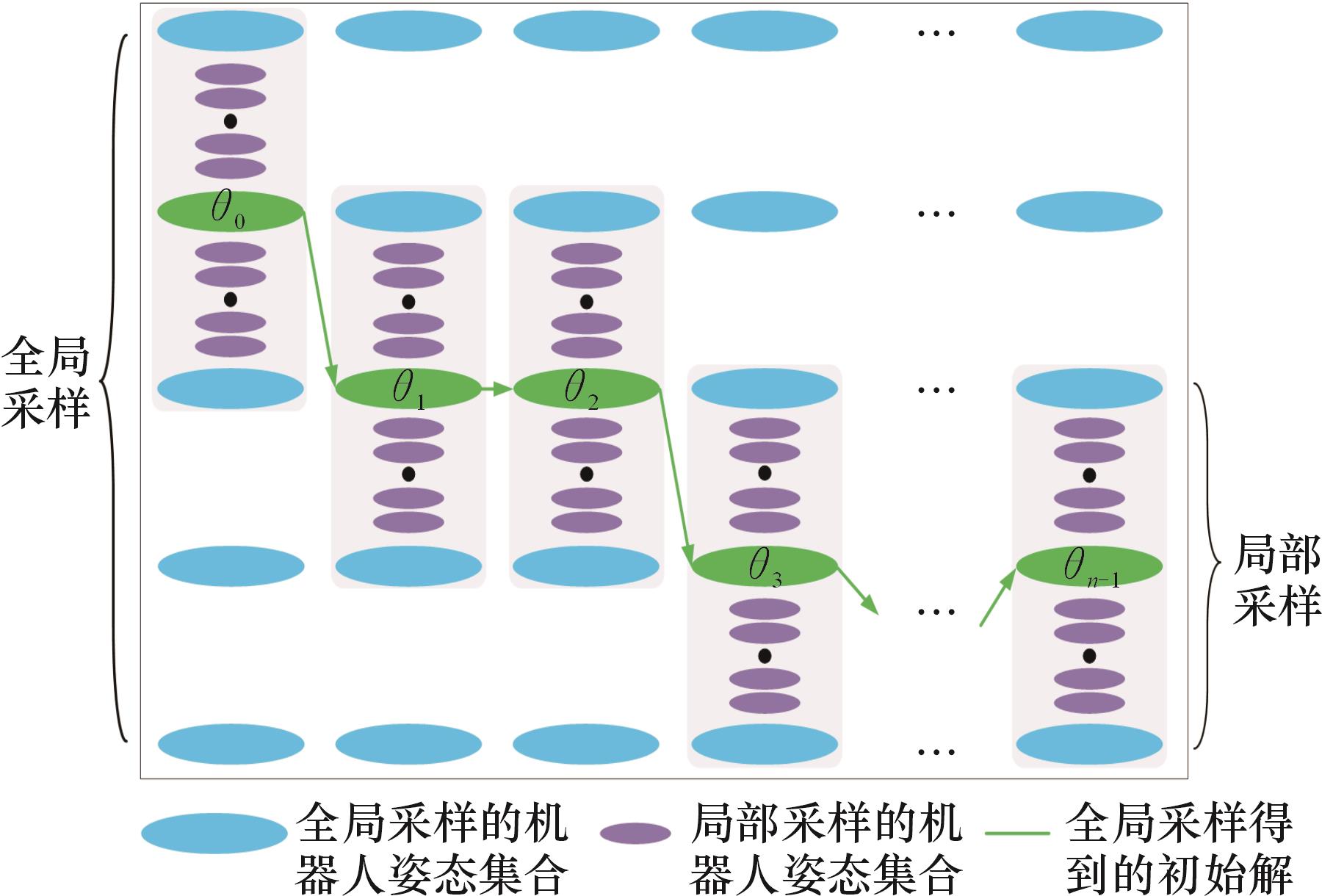
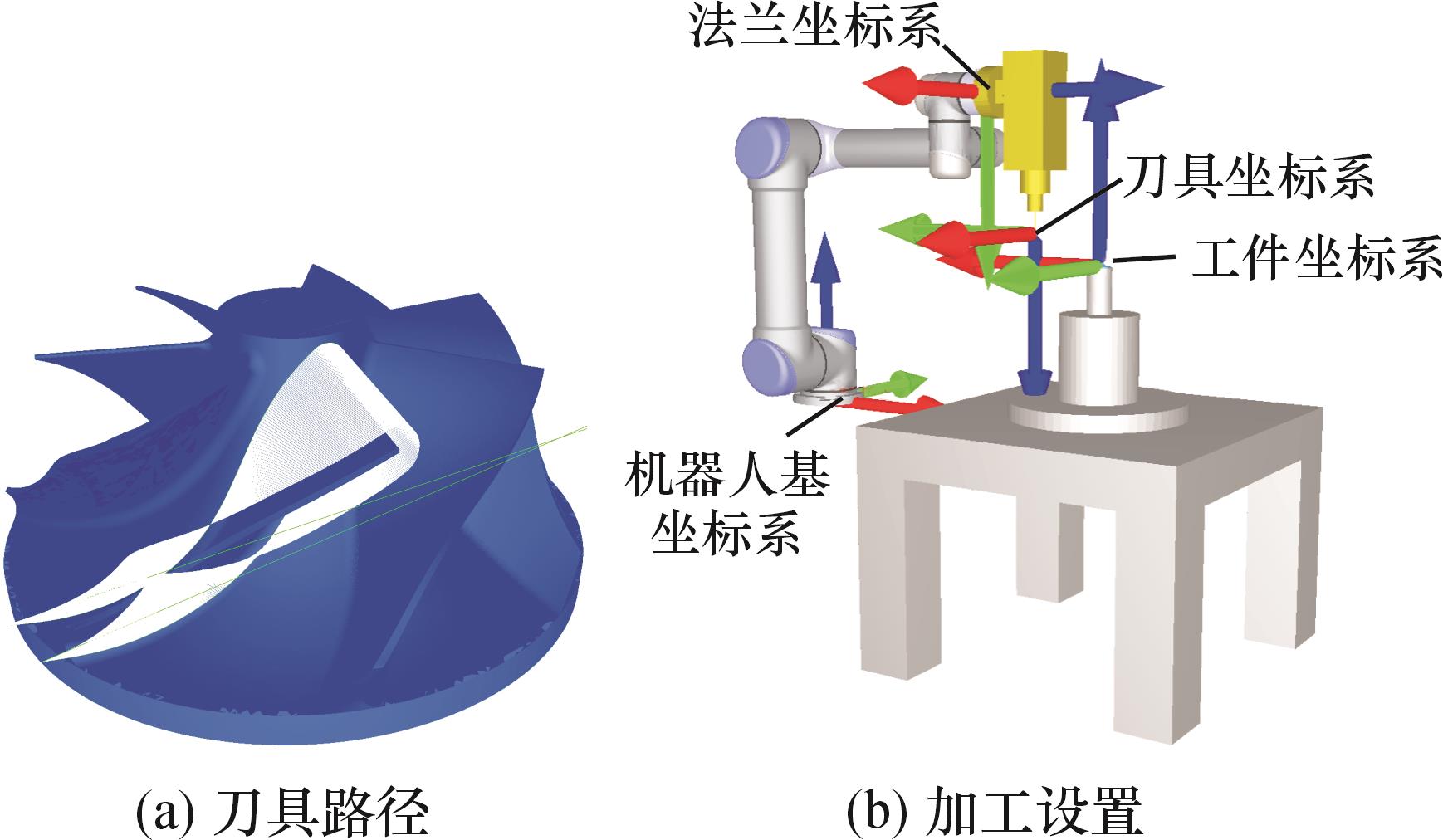
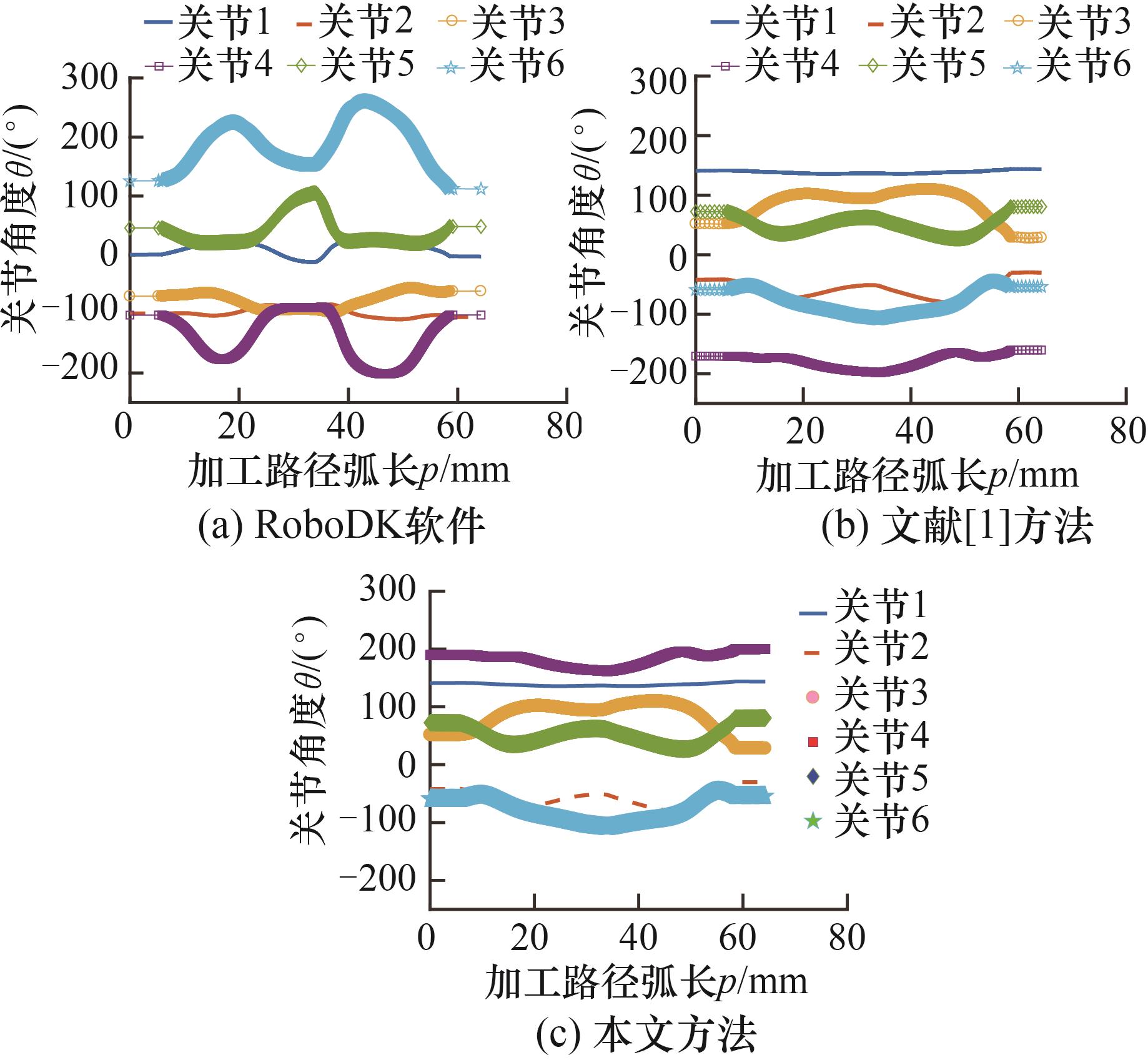
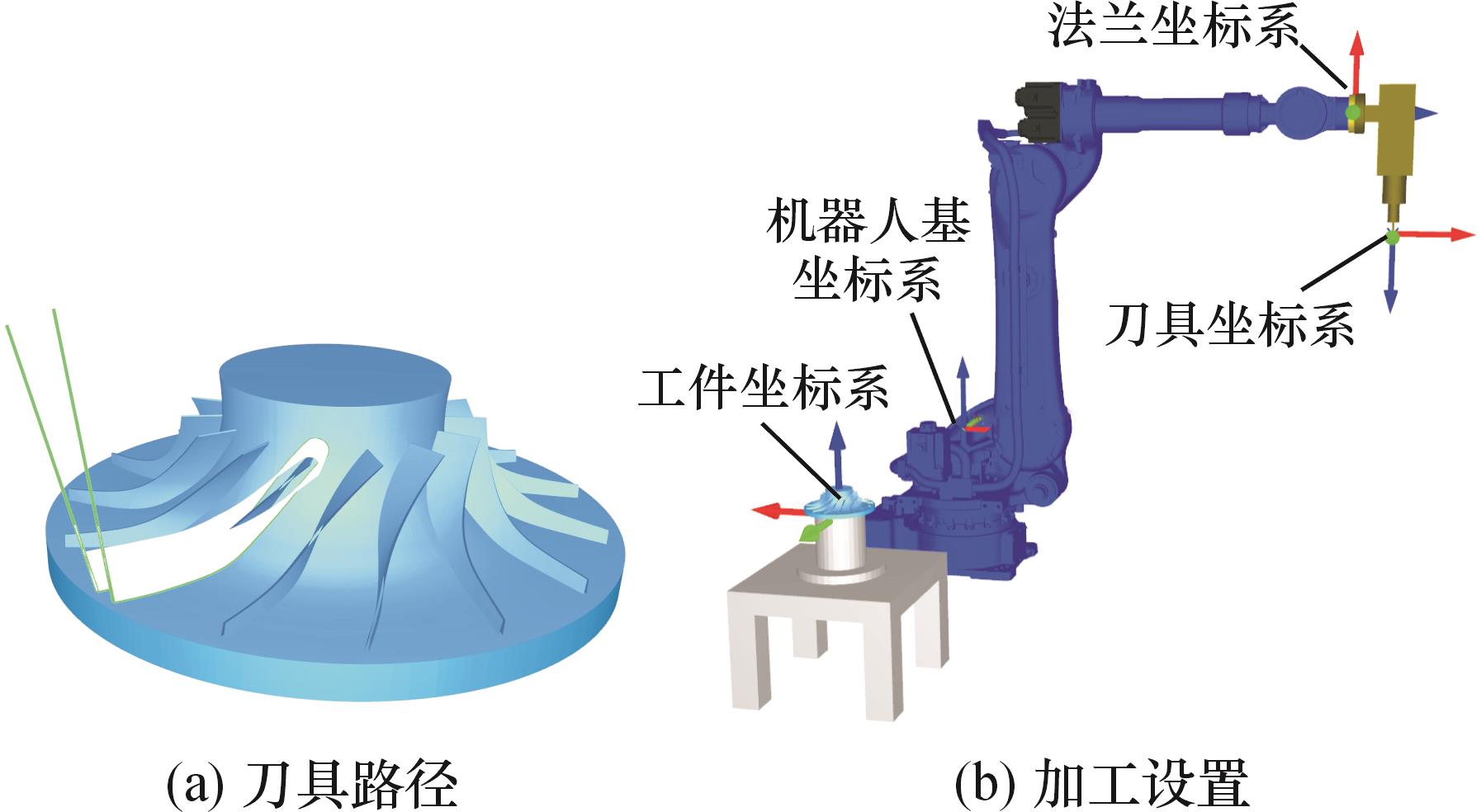
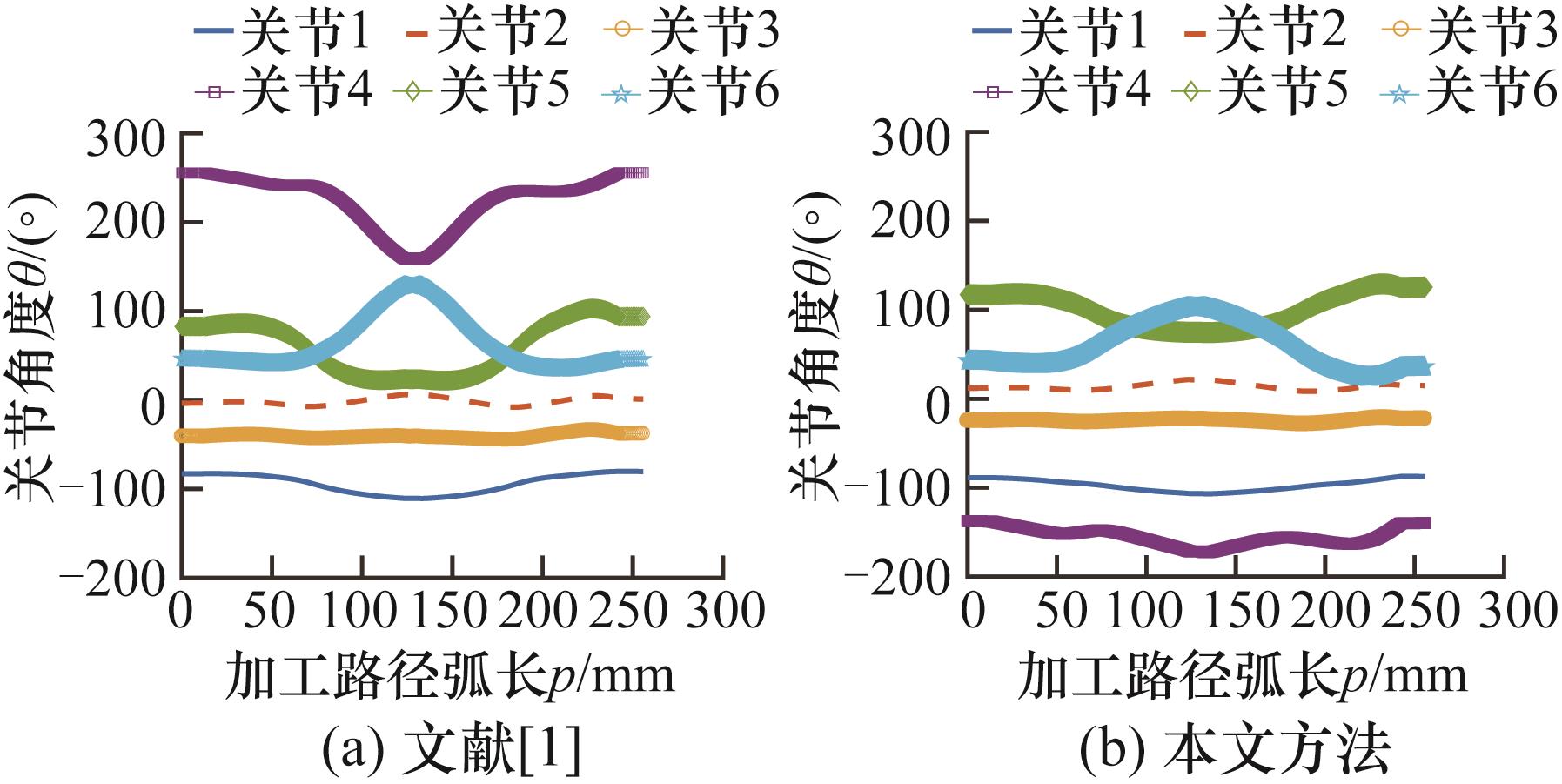
现有的冗余优化方法在六轴机器人执行五轴加工任务时往往未能充分利用机器人的冗余自由度,影响所规划运动路径的光顺效果。提出了一种高效的六轴机器人无碰撞且光顺的关节运动路径规划方法,该方法通过改变每个刀位数据处的冗余变量来生成所有可行的机器人姿态,充分利用机器人的冗余自由度。为了提高计算效率,引入了结合粗搜索和精搜索的两步搜索策略,并采用贪心策略从可行姿态里选择机器人姿态。该方法无需分割加工路径,可以同时优化整个加工路径的机器人姿态。仿真计算了六轴机器人执行五轴铣削加工曲面任务的关节运动路径,验证了所提方法的有效性。
中图分类号: