


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (9): 2117-2125.DOI: 10.3969/j.issn.1004-132X.2025.09.024
王旭东( ), 赵京()
), 赵京()
出版日期:2025-09-25
发布日期:2025-10-15
通讯作者:
赵京
作者简介:王旭东,男,1998年生,硕士研究生。研究方向为新型救援装备。E-mail:15726243965@163.com
Xudong WANG(), Jing ZHAO()
Online:2025-09-25
Published:2025-10-15
Contact:
Jing ZHAO
摘要:
为了提高钳剪抓一体多功能属具中功能转换机构自锁性能的可靠性,研究了该机构在自锁状态下的接触性能,并基于测试条件设计了该机构的原始样机和测试样机,然后进行了测试研究。设计了功能转换机构的样机,提出了一种基于滑块-滑槽的自锁机构。在充分考虑样机自锁状态下的弹性变形、黏着、堆叠变形及滑动剪切的接触状态后,提出了新的接触模型。在此基础上,通过有限元分析研究了滑块-滑槽在接触区域的自锁状态和接触特性分布规律。设计了试验以验证模型及设计的可行性。结果表明,样机能够实现自锁且展现出良好的受力特性,另外,所提接触模型的最大剪切应力相对误差比传统模型低59.3%。
中图分类号:
王旭东, 赵京. 自锁状态下钳剪抓一体属具接触性能研究[J]. 中国机械工程, 2025, 36(9): 2117-2125.
Xudong WANG, Jing ZHAO. Research on Contact Properties of Clamp-Shear-Grab Integrated Attachments under Self-locked States[J]. China Mechanical Engineering, 2025, 36(9): 2117-2125.
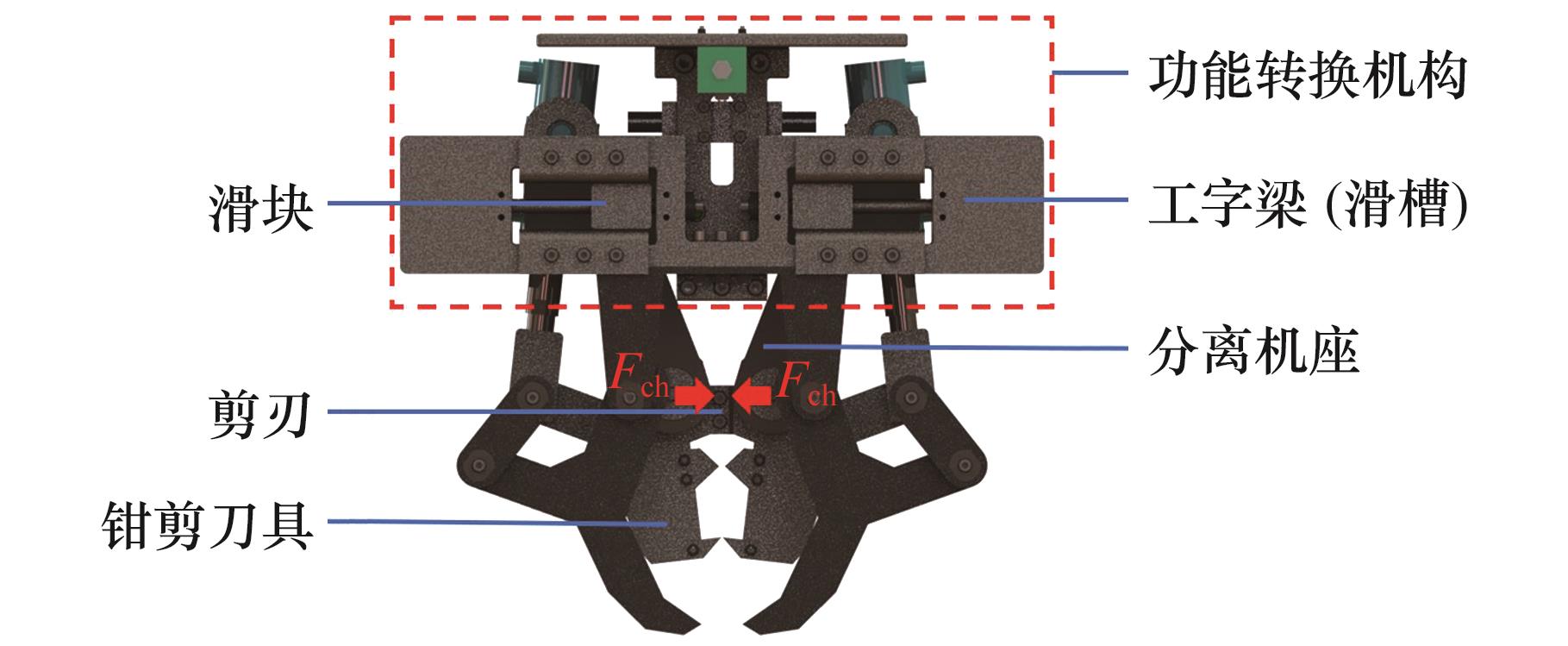
图1 功能转换机构原始样机
Fig.1 Original prototype of function transformation mechanism
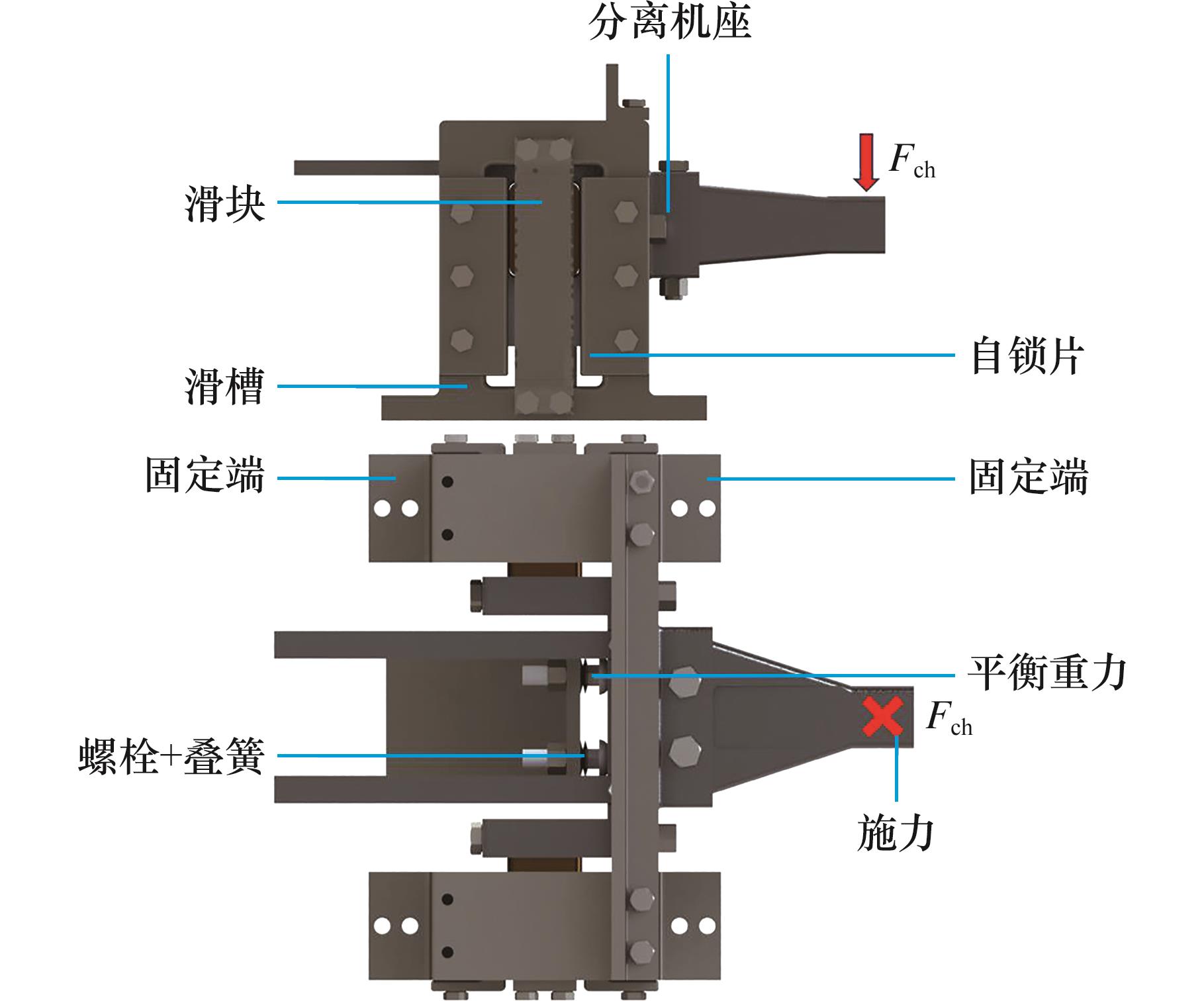
图2 功能转换机构测试样机
Fig.2 Test prototype of function transformation mechanism
| 参数 | 原始样机 | 测试样机 | 缩尺比例 |
|---|---|---|---|
| 长度l/mm | 1 | 0.9 | 0.9 |
| 密度ρ/(g·cm-3) | 7.8 | 2.8 | 0.36 |
| 泊松比ν | 0.3 | 0.33 | 1.1 |
| 弹性模量E/GPa | 200 | 70 | 0.35 |
| 力F/N | 30 000 | 8000 | 0.27 |
| 重力加速度g/(m·s-2) | 10 | 10 | 1 |
| 力矩M/(N·m) | 30 000 | 7200 | 0.24 |
| 应力σ/MPa | 761.28 | 258.97 | 0.34 |
| 应变ε | 0.007 01 | 0.006 53 | 0.93 |
表1 原始样机和测试样机参数
Tab.1 Parameters of original prototype and test prototype
| 参数 | 原始样机 | 测试样机 | 缩尺比例 |
|---|---|---|---|
| 长度l/mm | 1 | 0.9 | 0.9 |
| 密度ρ/(g·cm-3) | 7.8 | 2.8 | 0.36 |
| 泊松比ν | 0.3 | 0.33 | 1.1 |
| 弹性模量E/GPa | 200 | 70 | 0.35 |
| 力F/N | 30 000 | 8000 | 0.27 |
| 重力加速度g/(m·s-2) | 10 | 10 | 1 |
| 力矩M/(N·m) | 30 000 | 7200 | 0.24 |
| 应力σ/MPa | 761.28 | 258.97 | 0.34 |
| 应变ε | 0.007 01 | 0.006 53 | 0.93 |
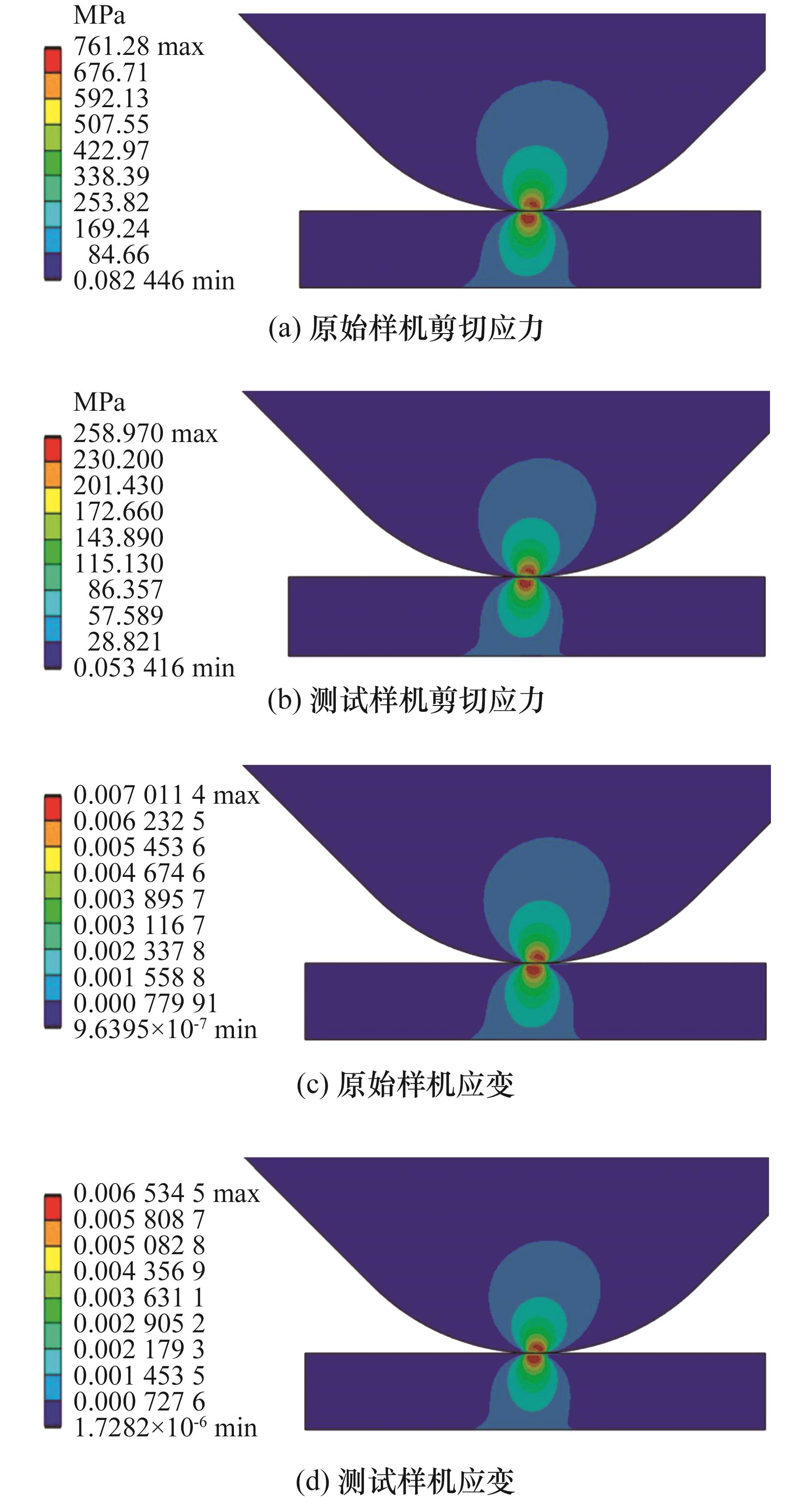
图3 原始样机与测试样机(关键位置)应力应变对比
Fig.3 Comparison of stress and strain between original prototype and test prototype (key position)
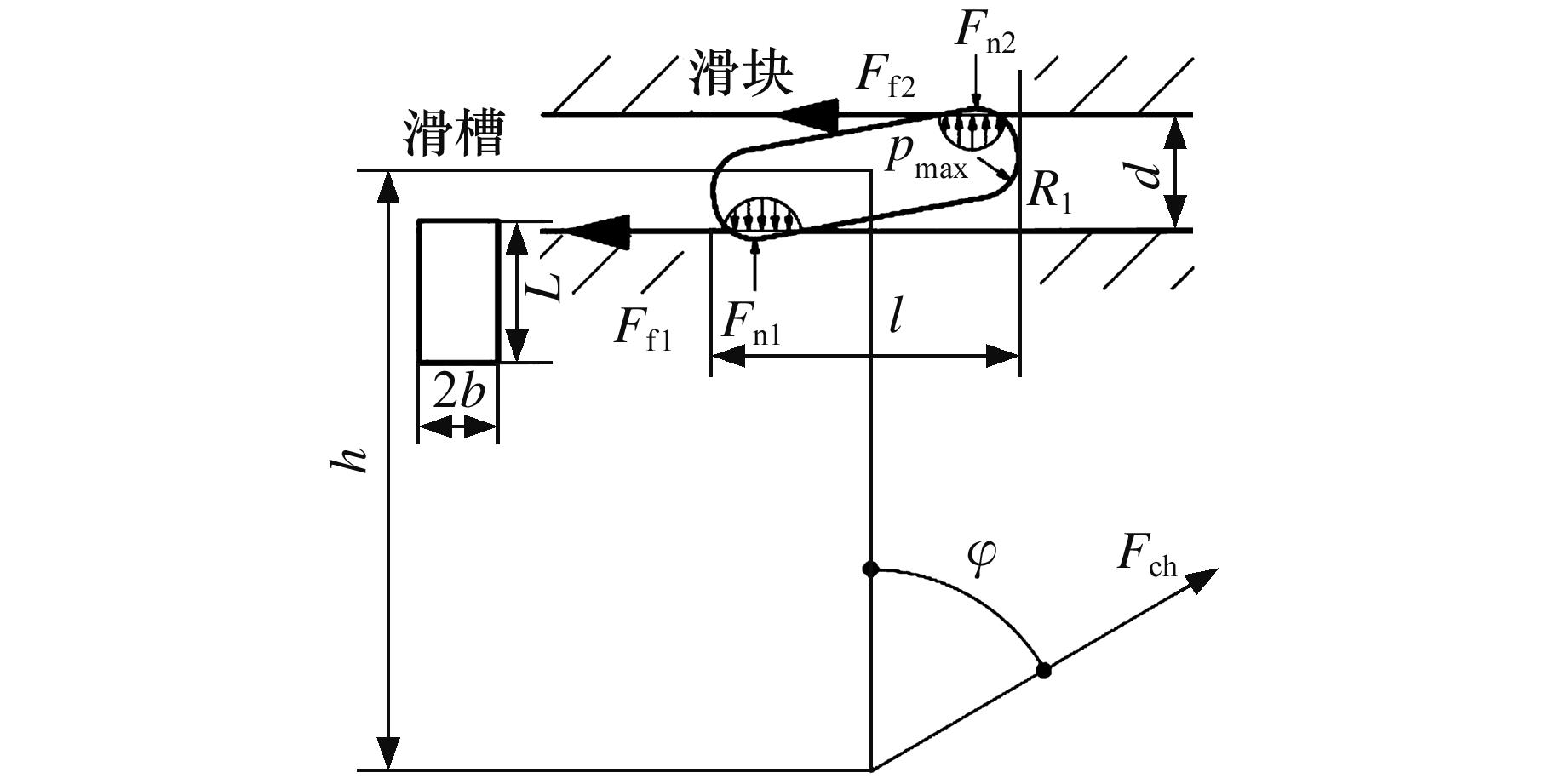
图4 自锁原理
Fig.4 Self-locked principle
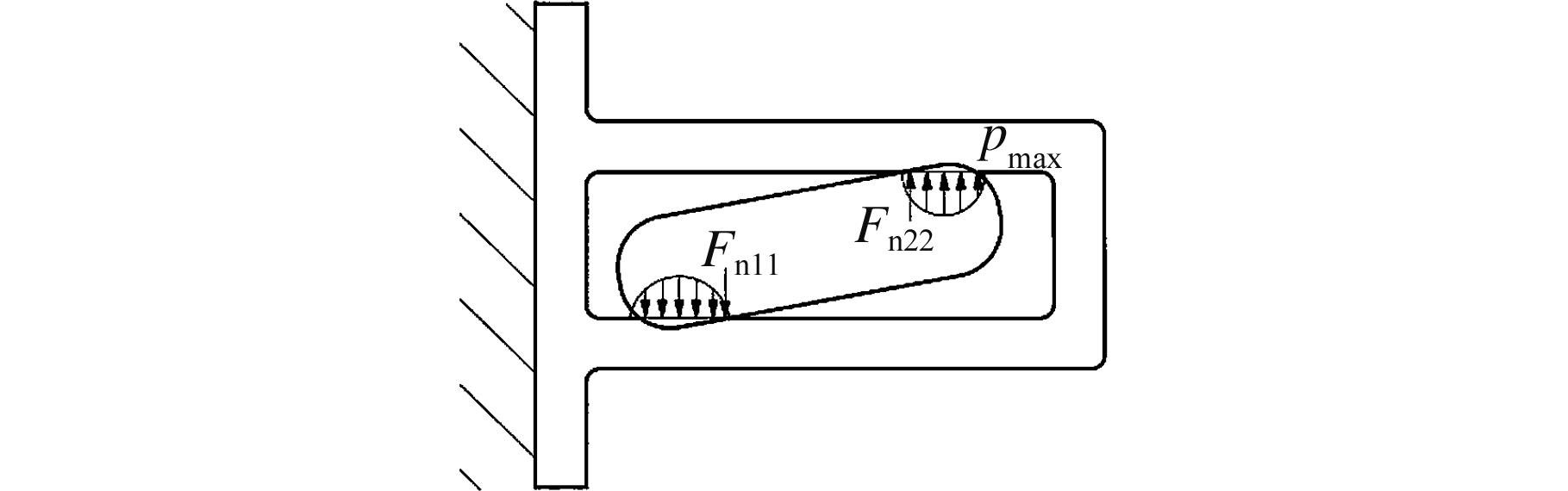
图5 测试样机受力示意图
Fig.5 Mechanical diagram of test prototype
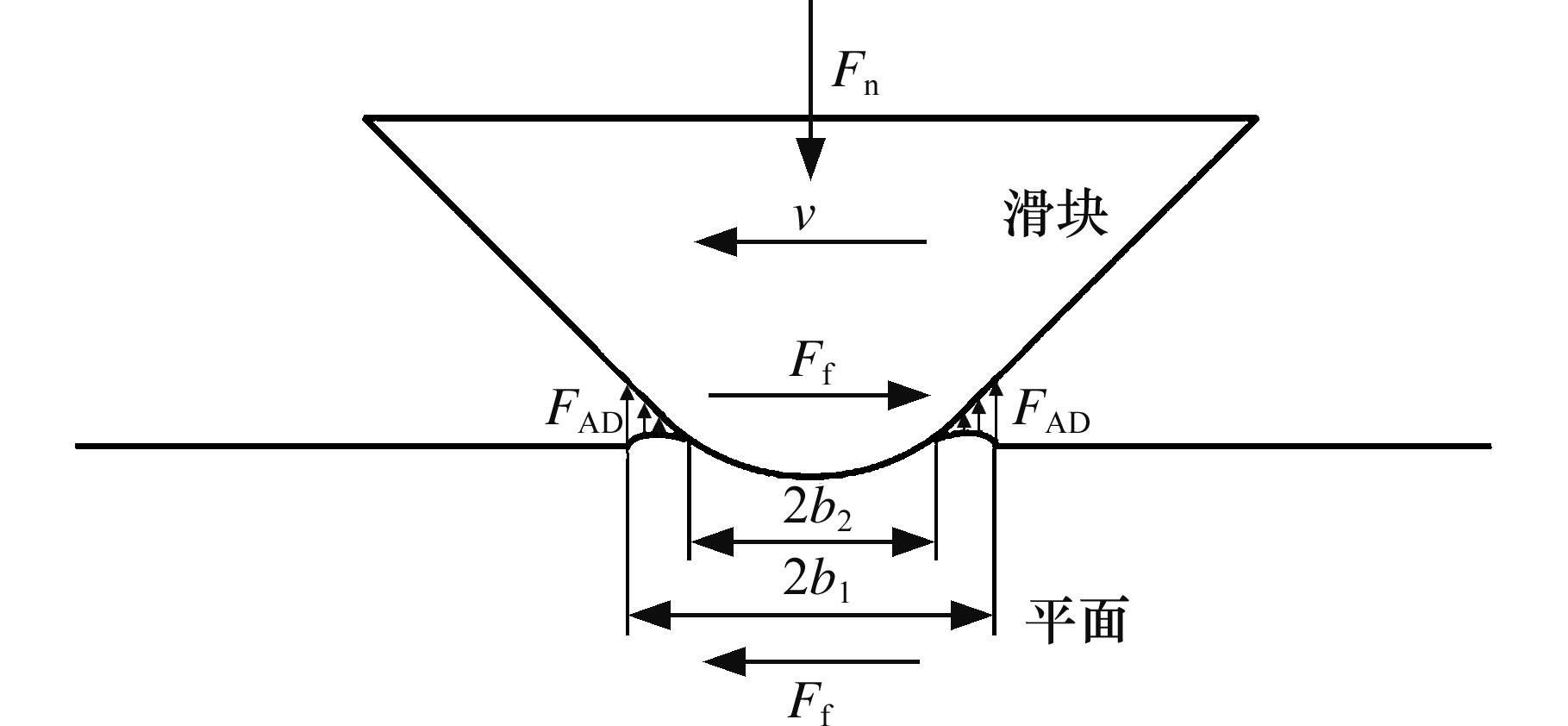
图6 滑块-平面接触界面
Fig.6 Slider-plane contact interface
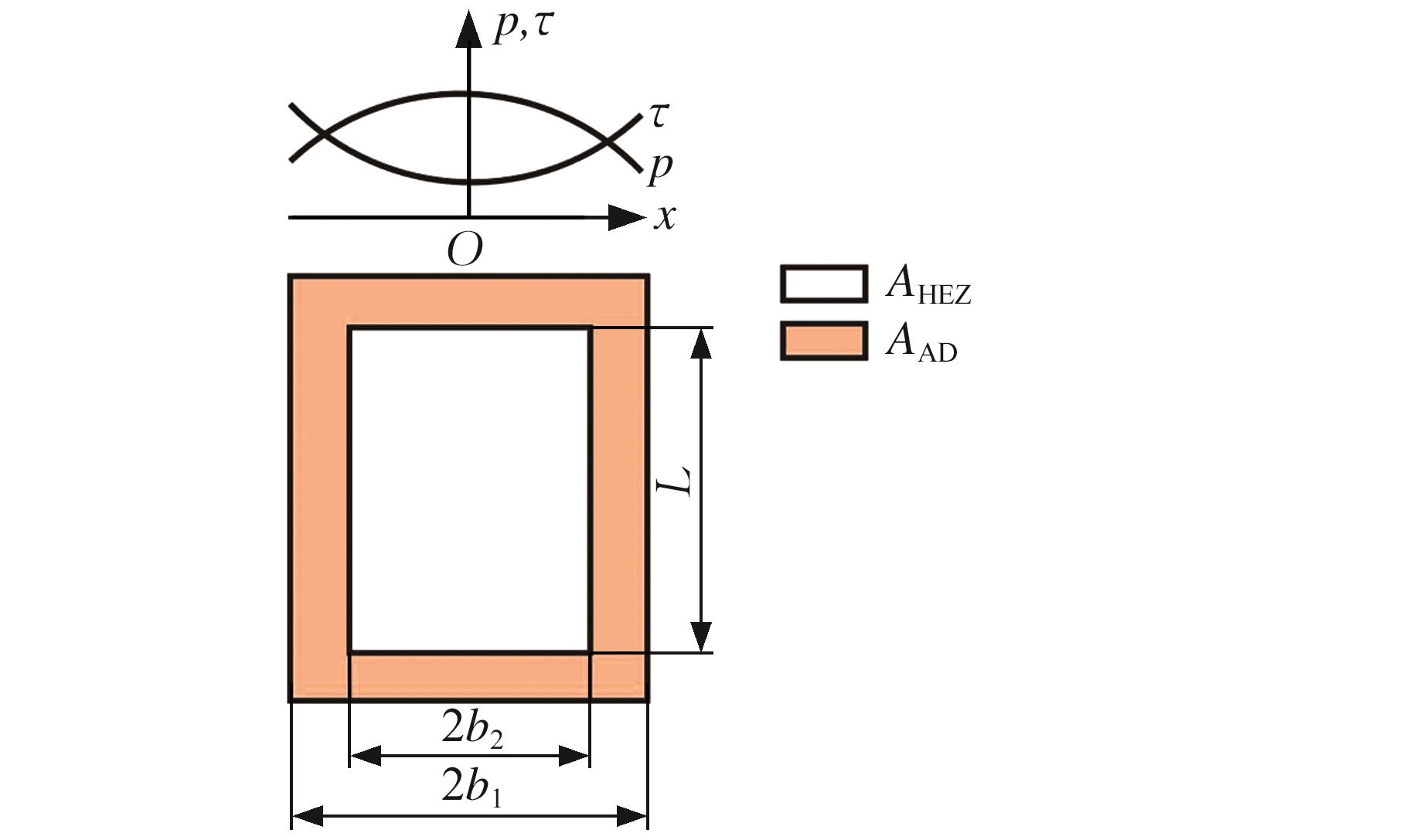
图7 改进模型原理
Fig.7 Principle of the modified model
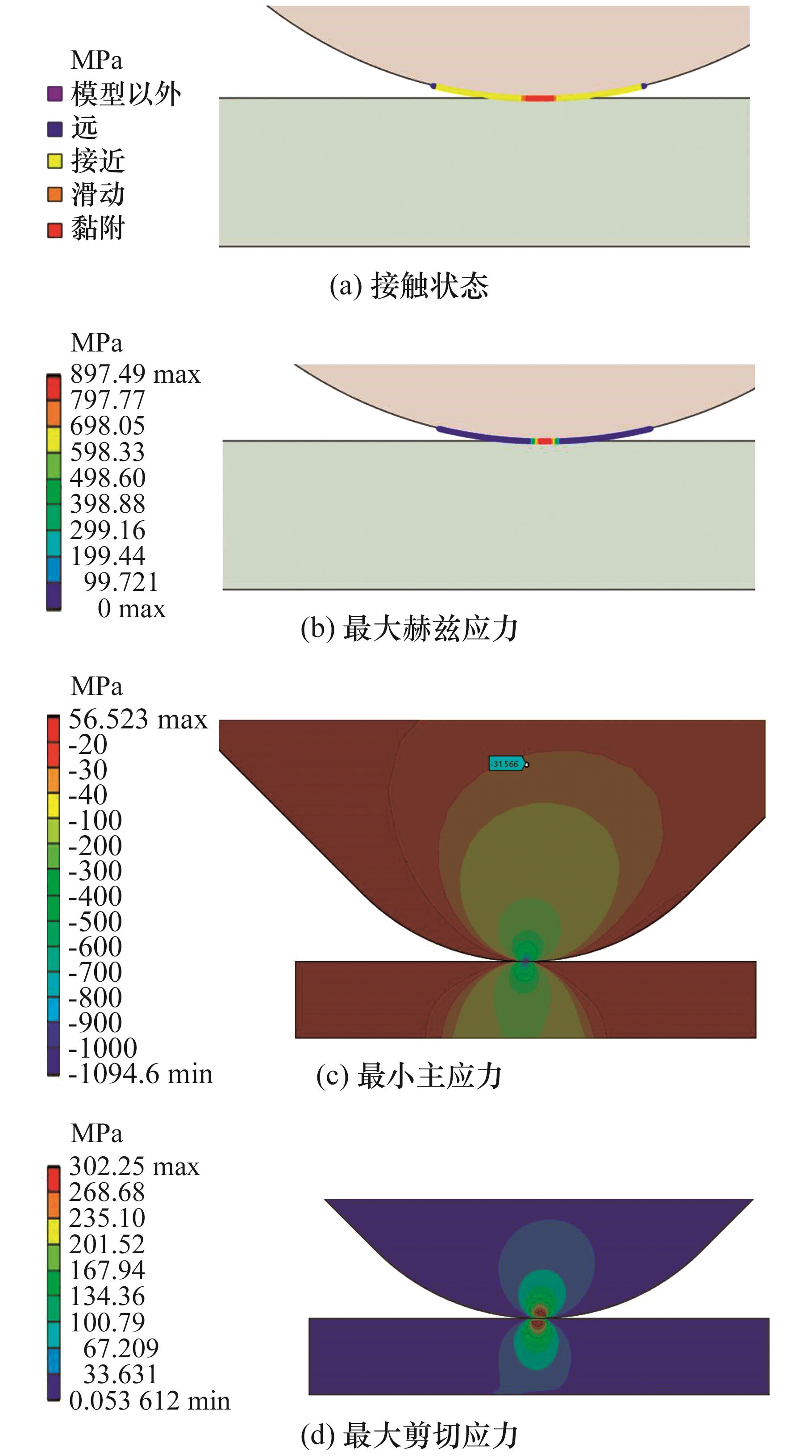
图8 3Cr13仿真分析
Fig.8 3Cr13 simulation analysis
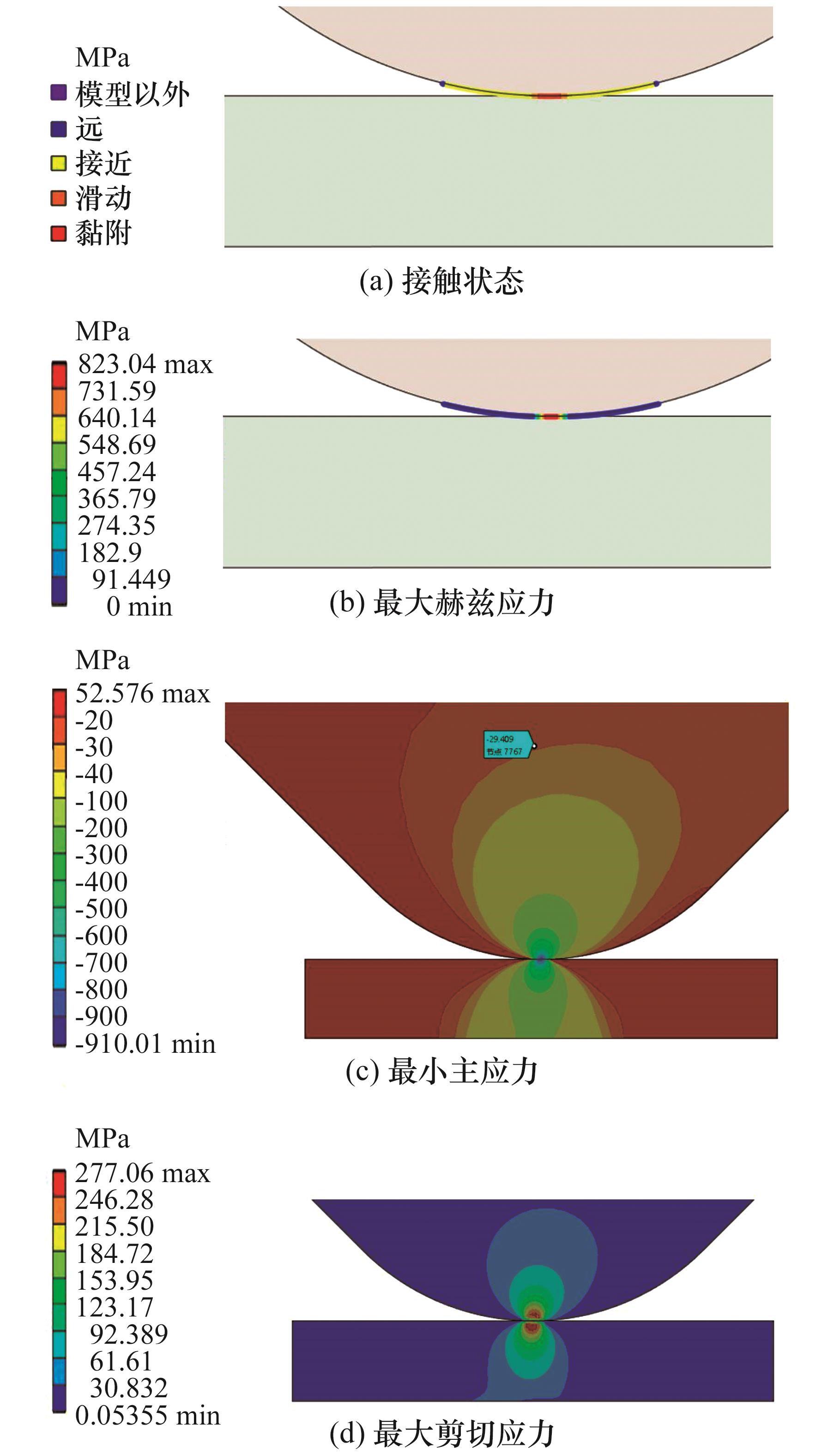
图9 QSn6.5-0.1仿真分析
Fig.9 QSn6.5-0.1 simulation analysis
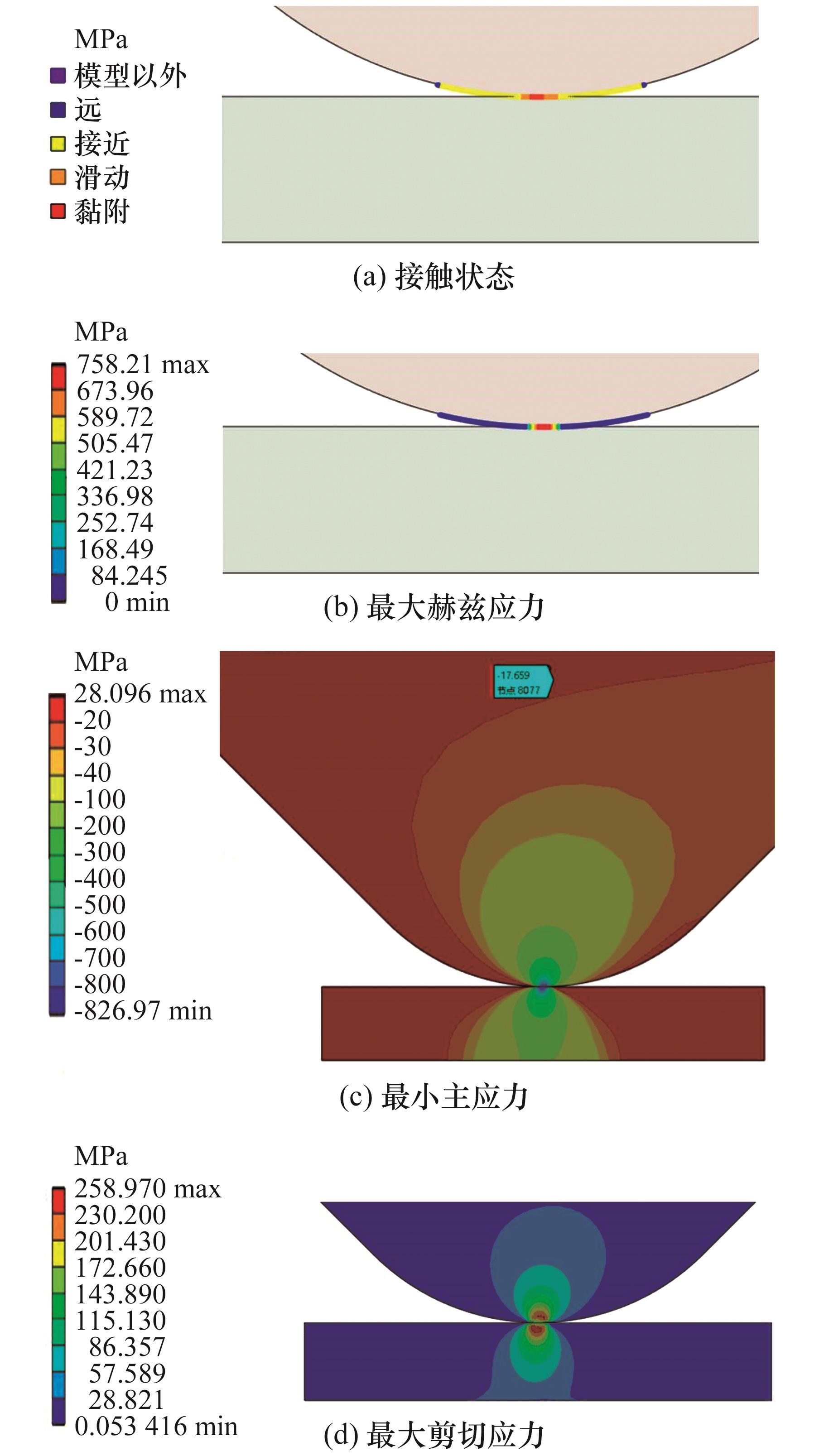
图10 6061仿真分析
Fig.10 6061 simulation analysis
| 模型 | 接触状态 |
|---|---|
| 传统模型 | 自锁 |
| 改进模型 | 黏着、滑动剪切、自锁 |
| 仿真模型 | 黏着、滑动剪切、自锁 |
表2 接触状态对比
Tab.2 Comparison of contact states
| 模型 | 接触状态 |
|---|---|
| 传统模型 | 自锁 |
| 改进模型 | 黏着、滑动剪切、自锁 |
| 仿真模型 | 黏着、滑动剪切、自锁 |
| 材料 | 参数 | 传统 模型/MPa | 改进 模型/MPa | 仿真 模型/MPa | Δ1/% | Δ2/% |
|---|---|---|---|---|---|---|
| 3Cr13 | 907.0 | 906.8 | 897.5 | 1.1 | 1.0 | |
| 915.4 | 979.5 | 1094.6 | 16.4 | 10.5 | ||
| 87.8 | 266.8 | 302.3 | 71.0 | 11.7 | ||
| QSn6.5-0.1 | 827.4 | 827.3 | 823.0 | 5.3 | 5.2 | |
| 835.1 | 901.7 | 910.0 | 8.2 | 0.9 | ||
| 80.1 | 259.1 | 277.1 | 71.1 | 6.5 | ||
| 6061 | 738.7 | 738.6 | 758.2 | 2.6 | 2.6 | |
| 745.5 | 815.5 | 827.0 | 9.9 | 1.4 | ||
| 71.5 | 250.5 | 259.0 | 72.4 | 3.3 |
表3 应力对比
Tab.3 Stress comparison
| 材料 | 参数 | 传统 模型/MPa | 改进 模型/MPa | 仿真 模型/MPa | Δ1/% | Δ2/% |
|---|---|---|---|---|---|---|
| 3Cr13 | 907.0 | 906.8 | 897.5 | 1.1 | 1.0 | |
| 915.4 | 979.5 | 1094.6 | 16.4 | 10.5 | ||
| 87.8 | 266.8 | 302.3 | 71.0 | 11.7 | ||
| QSn6.5-0.1 | 827.4 | 827.3 | 823.0 | 5.3 | 5.2 | |
| 835.1 | 901.7 | 910.0 | 8.2 | 0.9 | ||
| 80.1 | 259.1 | 277.1 | 71.1 | 6.5 | ||
| 6061 | 738.7 | 738.6 | 758.2 | 2.6 | 2.6 | |
| 745.5 | 815.5 | 827.0 | 9.9 | 1.4 | ||
| 71.5 | 250.5 | 259.0 | 72.4 | 3.3 |

图11 试验装置
Fig.11 Test equipment
| 材料 | ||||
|---|---|---|---|---|
| 3Cr13 | 219 | 0.30 | 7.76 | 0.30 |
| QSn6.5-0.1 | 117 | 0.20 | 8.65 | 0.34 |
| 6061 | 70 | 0.13 | 2.70g/cm3 | 0.33 |
表4 滑块材料参数
Tab.4 Material parameters of slider
| 材料 | ||||
|---|---|---|---|---|
| 3Cr13 | 219 | 0.30 | 7.76 | 0.30 |
| QSn6.5-0.1 | 117 | 0.20 | 8.65 | 0.34 |
| 6061 | 70 | 0.13 | 2.70g/cm3 | 0.33 |
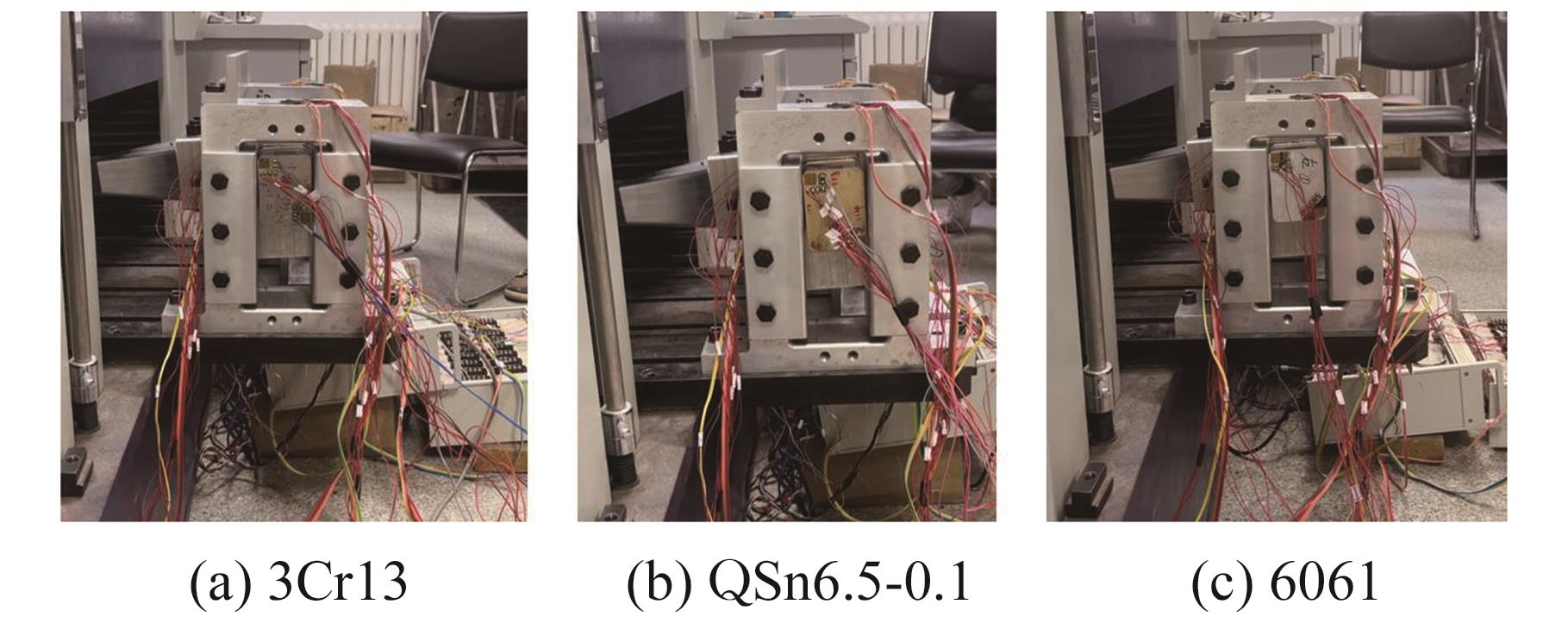
图12 自锁试验
Fig.12 Self-locked test
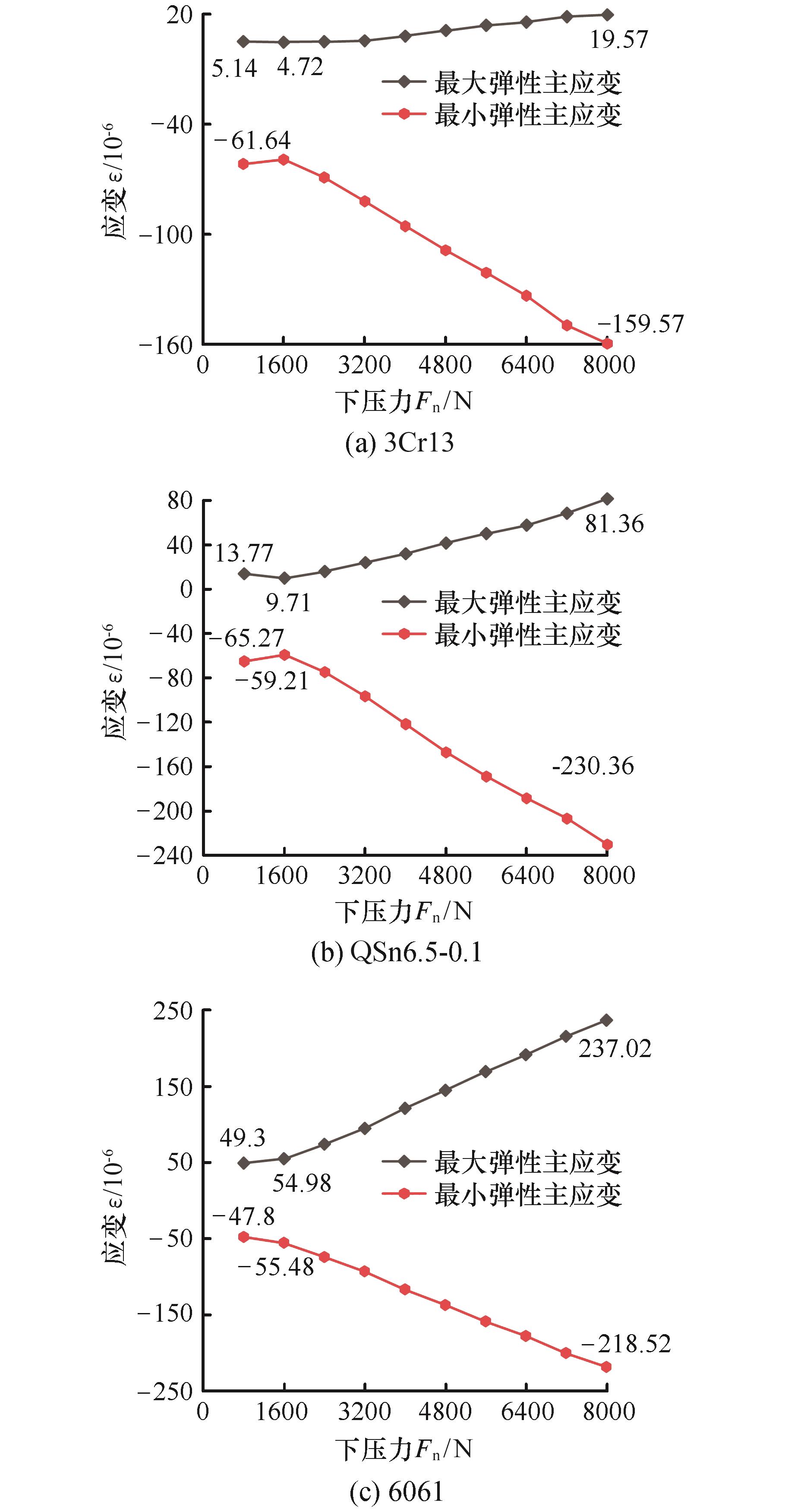
图13 应变变化情况
Fig.13 Strain changing situation
| 材料 | 仿真模型测点 应力/MPa | 测试试验测点 应力/MPa | 误差/% |
|---|---|---|---|
| 3Cr13 | 9.7 | ||
| QSn6.5-0.1 | 8.9 | ||
| 6061 | 15.7 |
表5 最小主应力对比
Tab.5 Minimum principal stress comparison
| 材料 | 仿真模型测点 应力/MPa | 测试试验测点 应力/MPa | 误差/% |
|---|---|---|---|
| 3Cr13 | 9.7 | ||
| QSn6.5-0.1 | 8.9 | ||
| 6061 | 15.7 |
| 试验内容 | 试验情况 |
|---|---|
| 开合试验 | 无干涉完成10次开合 |
| 抱抓试验 | 抱抓150kg重物移动5 m |
| 剪切试验 | 剪断直径为10mm的钢筋 |
| 钳碎试验 | 钳碎横截面120mm×120mm的水泥柱 |
表6 工程化测试结果
Tab.6 Engineering testing results
| 试验内容 | 试验情况 |
|---|---|
| 开合试验 | 无干涉完成10次开合 |
| 抱抓试验 | 抱抓150kg重物移动5 m |
| 剪切试验 | 剪断直径为10mm的钢筋 |
| 钳碎试验 | 钳碎横截面120mm×120mm的水泥柱 |

图14 工程化测试
Fig.14 Engineering test
| [1] | 李华玥, 文鑫涛, 陈雅慧, 等. 2020年国外地震灾害及其影响综述[J]. 震灾防御技术, 2021, 16(3):583-588. |
| LI Huayue, WEN Xintao, CHEN Yahui, et al. Review of Worldwide Earthquake Disasters and the Impacts in 2020[J]. Technology for Earthquake Disaster Prevention, 2021, 16(3):583-588. | |
| [2] | IPHAR M. ANN and ANFIS Performance Prediction Models for Hydraulic Impact Hammers[J]. Tunnelling and Underground Space Technology, 2012, 27(1):23-29. |
| [3] | KAPICA R. The System of Tracking the Position of the Bucket Excavators Wheel for Prevention of Risk Situations[J]. Acta Geodynamica et Geomaterialia, 2018:277-287. |
| [4] | SOLOVIEV I, SICOE A. New Persistent Back-end for the ATLAS Online Information Service[C]∥2014 19th IEEE-NPSS Real Time Conference. Nara, 2014:1-6. |
| [5] | WANG Chunrong, ZHAO Jing, XIA Erdong. Design and Optimization of a Novel Rescue End-effector[J]. Proceedings of the Institution of Mechanical Engineers Part C—Journal of Mechanical Engineering Science, 2019, 233(3):1032-1044. |
| [6] | ZHAO Jing, WANG Xudong, ZHANG Daqing, et al. Design and Optimization of Clamp-Shear-Grab Integrated Attachment[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2024, 46(5):296. |
| [7] | ZHAO Jing, ZHANG Hao, ZHANG Ziqiang, et al. A Multi-functional Engineering Attachment for Clamping, Cutting, and Grasping with a Single Degree of Freedom Variable Topology Mechanism:US20210354216[P]. 2021-11-18. |
| [8] | CHEN Yuli, QIAO Chuan, QIU Xinming, et al. A Novel Self-locked Energy Absorbing System[J]. Journal of the Mechanics and Physics of Solids, 2016, 87:130-149. |
| [9] | DAI Xiaomeng, ZONG Liang, DING Yang, et al. Experimental Study on Seismic Behavior of a Novel Plug-in Self-lock Joint for Modular Steel Construction[J]. Engineering Structures, 2019, 181:143-164. |
| [10] | GENG Dai, ZHANG Shimin, WANG Deguo. Research on Sealing Ring for Intelligent Plug in High-pressure Pipeline[C]∥ICPTT 2009. Shanghai, 2009:1934-1942. |
| [11] | ZHUPANSKA O I. Adhesive Full Stick Contact of a Rigid Cylinder with an Elastic Half-space[J]. International Journal of Engineering Science, 2012, 55:54-65. |
| [12] | MISHRA M, EGBERTS P, BENNEWITZ R, et al. Friction Model for Single-asperity Elastic-Plastic Contacts[J]. Physical Review B—Condensed Matter and Materials Physics, 2012, 86 (4):045452. |
| [13] | HAO S, KEER L M. Rolling Contact between Rigid Cylinder and Semi-infinite Elastic Body with Sliding and Adhesion[J]. Journal of Tribology, 2007, 129(3):481-494. |
| [14] | XU Kefei, CHU N R, JACKSON R L. An Investigation of the Elastic Cylindrical Line Contact Equations for Plane Strain and Stress Considering Friction[J]. Proceedings of the Institution of Mechanical Engineers Part J—Journal of Engineering Tribology, 2022, 236(9):1889-1897. |
| [15] | JACKSON ROBERT L. A Solution of Rigid Perfectly Plastic Cylindrical Indentation in Plane Strain and Comparison to Elastic-Plastic Finite Element Predictions with Hardening[J]. Journal of Applied Mechanics, 2018, 85(2):024501. |
| [16] | SHARMA A, JACKSON R L. A Finite Element Study of an Elasto-Plastic Disk or Cylindrical Contact Against a Rigid Flat in Plane Stress with Bilinear Hardening[J]. Tribology Letters, 2017, 65(3):112. |
| [1] | 叶绍干, 陈天星, 陈鼎, 苗克非, 赵守军, 刘会祥. 柱塞泵缸体-主轴花键齿面修形及抗磨损研究[J]. 中国机械工程, 2025, 36(8): 1767-1773. |
| [2] | 单小彪, 谢涛, 刘军考, 陈维山. 大型钢丝滚道球轴承的接触特性研究[J]. 中国机械工程, 2007, 18(20): 2429-2432. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||