


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (12): 2986-2992.DOI: 10.3969/j.issn.1004-132X.2025.12.022
妥吉英( ), 徐笑南, 李俊, 张玉琛, 黄安, 胡都, 刘梓林()
), 徐笑南, 李俊, 张玉琛, 黄安, 胡都, 刘梓林()
收稿日期:2025-04-09
出版日期:2025-12-25
发布日期:2025-12-31
通讯作者:
刘梓林
作者简介:妥吉英,男,1988年生,讲师、硕士研究生导师。研究方向为智能控制、非线性动力学。发表论文20余篇。E-mail:tjy@cqut.edu.cn。
基金资助:
TUO Jiying(), XU Xiaonan, LI Jun, ZHANG Yuchen, HUANG An, HU Du, LIU Zilin()
Received:2025-04-09
Online:2025-12-25
Published:2025-12-31
Contact:
LIU Zilin
摘要:
为提升柔性动作-评价(SAC)算法的收敛速度及训练的稳定性,在引入优势函数与奖励聚中机制的基础上,提出一种改进SAC算法。为验证改进SAC算法的训练效果,在六轴机械臂路径规划场景中进行了仿真分析,并与深度确定性策略梯度(DDPG)算法、双延迟深度确定性策略梯度(TD3)算法及SAC算法进行对比。结果显示,改进SAC算法在收敛速度和稳定性上均超越DDPG、TD3与SAC算法,训练1500回合后其路径规划成功率较SAC算法提高4.8%。进一步的实验验证了改进SAC算法的规划结果在真实环境中的可行性与有效性。
中图分类号:
妥吉英, 徐笑南, 李俊, 张玉琛, 黄安, 胡都, 刘梓林. 一种基于改进SAC算法的六轴机械臂路径规划[J]. 中国机械工程, 2025, 36(12): 2986-2992.
TUO Jiying, XU Xiaonan, LI Jun, ZHANG Yuchen, HUANG An, HU Du, LIU Zilin. A Six-axis Robotic Arm Path Planning Based on Improved SAC Algorithm[J]. China Mechanical Engineering, 2025, 36(12): 2986-2992.
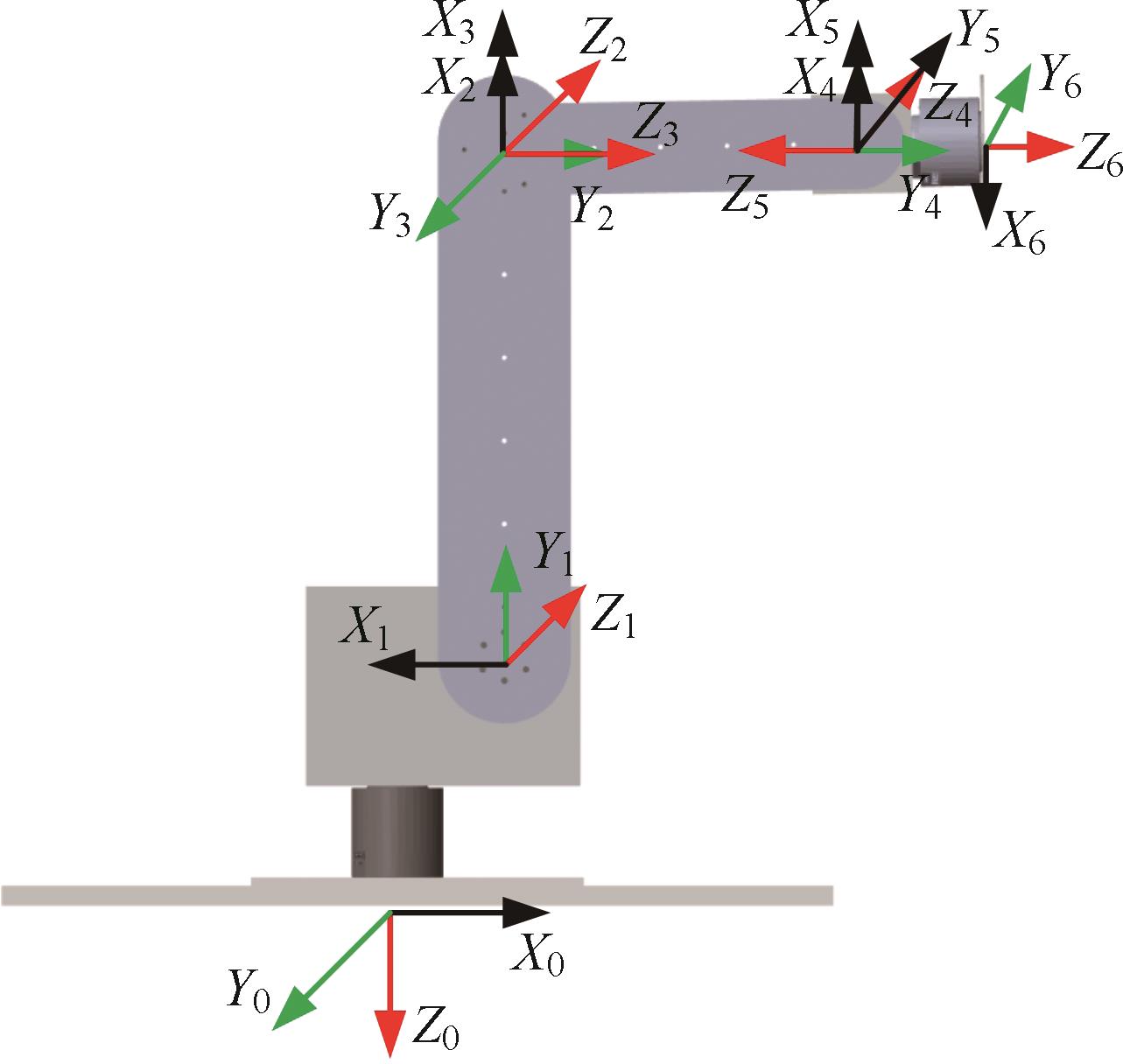
图1 MDH参数法
Fig.1 MDH parameter method
| 关节 | ||||
|---|---|---|---|---|
| 1 | 64.2 | 1.571 | 149.58 | 0 |
| 2 | 305 | 0 | 0 | |
| 3 | 0 | 1.571 | 0 | 3.142 |
| 4 | 0 | 213.91 | 0 | |
| 5 | 0 | 1.571 | 0 | 1.571 |
| 6 | 0 | 0 | 74.91 | 0 |
表1 MDH参数表
Tab.1 MDH parameter table
| 关节 | ||||
|---|---|---|---|---|
| 1 | 64.2 | 1.571 | 149.58 | 0 |
| 2 | 305 | 0 | 0 | |
| 3 | 0 | 1.571 | 0 | 3.142 |
| 4 | 0 | 213.91 | 0 | |
| 5 | 0 | 1.571 | 0 | 1.571 |
| 6 | 0 | 0 | 74.91 | 0 |
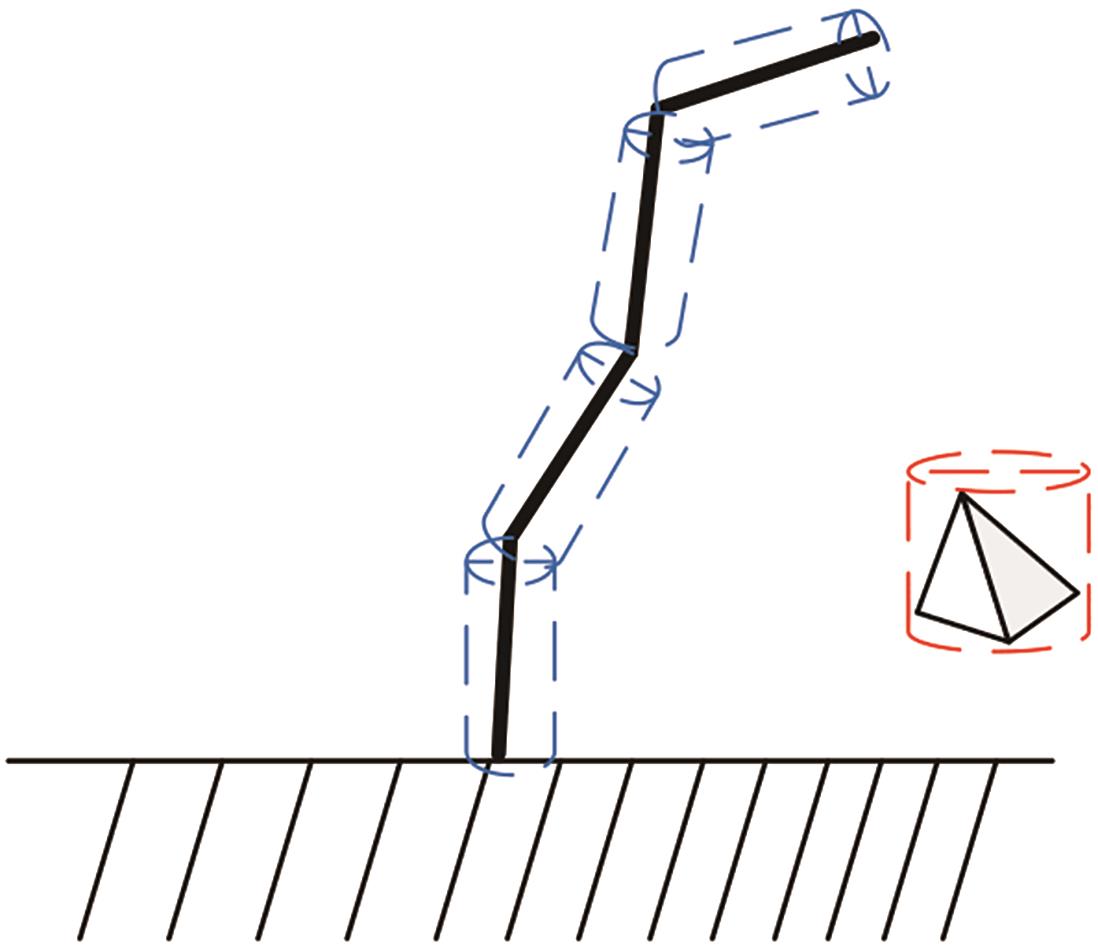
图2 圆柱形包围盒简图
Fig.2 Schematic diagram of a cylindrical bounding box
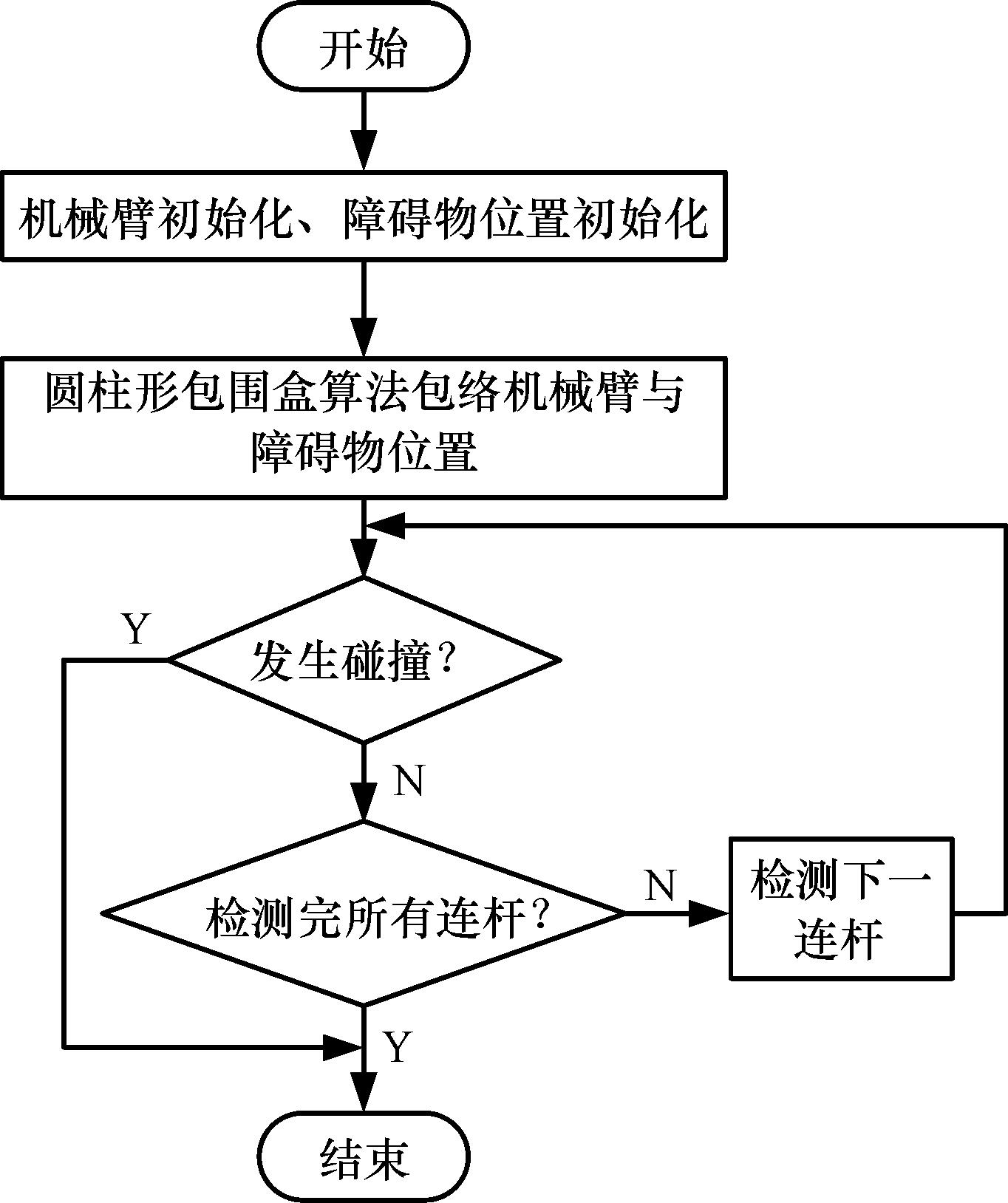
图3 碰撞检测流程图
Fig.3 Collision detection flowchart
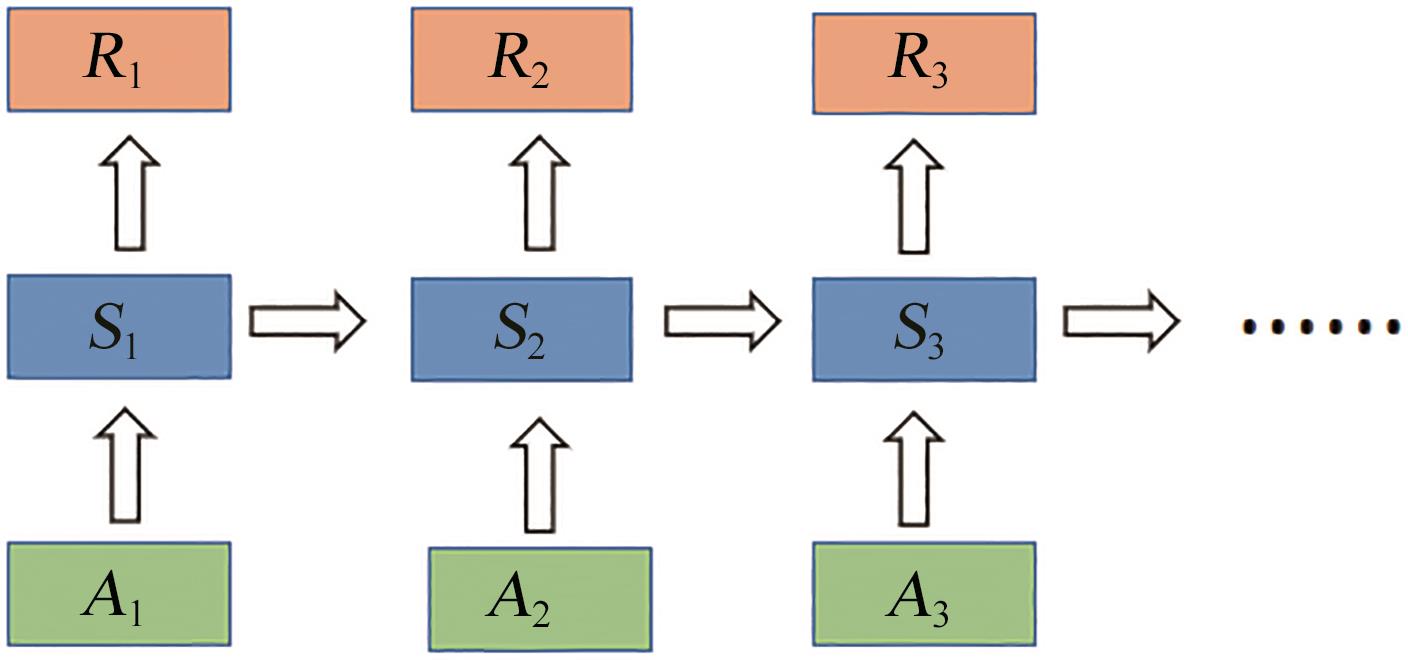
图4 马尔可夫决策过程示意图
Fig.4 Markov decision process diagram
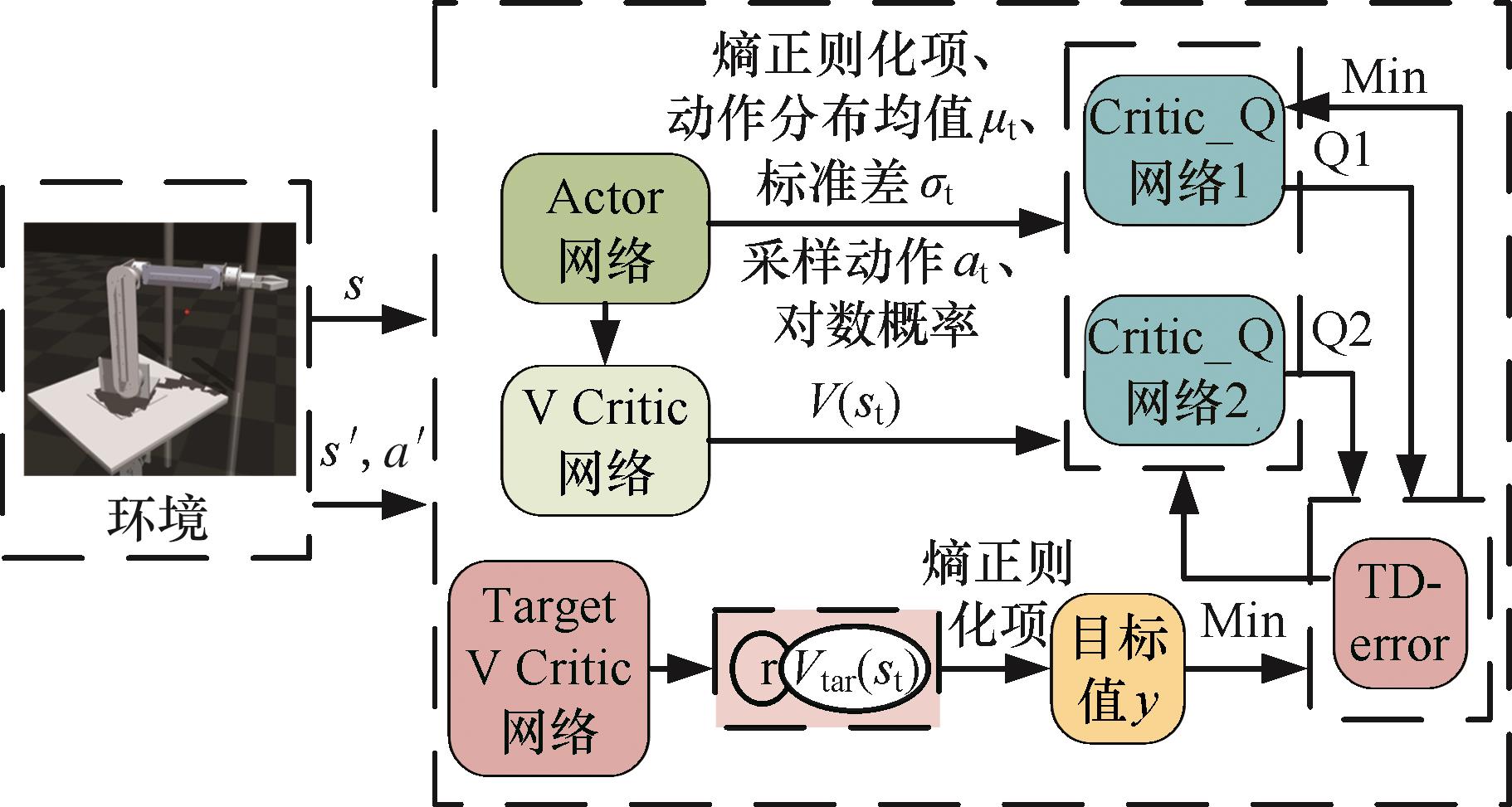
图5 SAC算法框图
Fig.5 SAC algorithm block diagram
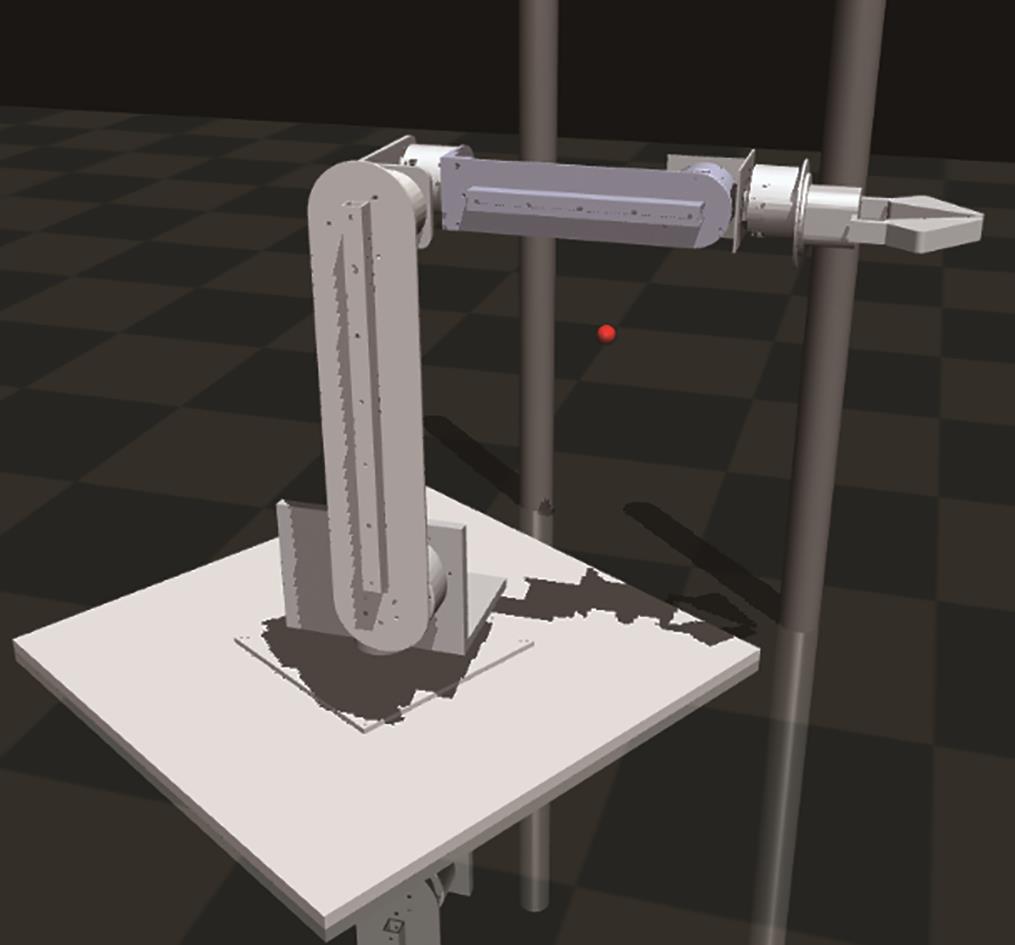
图6 机械臂深度强化学习仿真模型
Fig.6 Robotic arm deep reinforcement learning simulation model
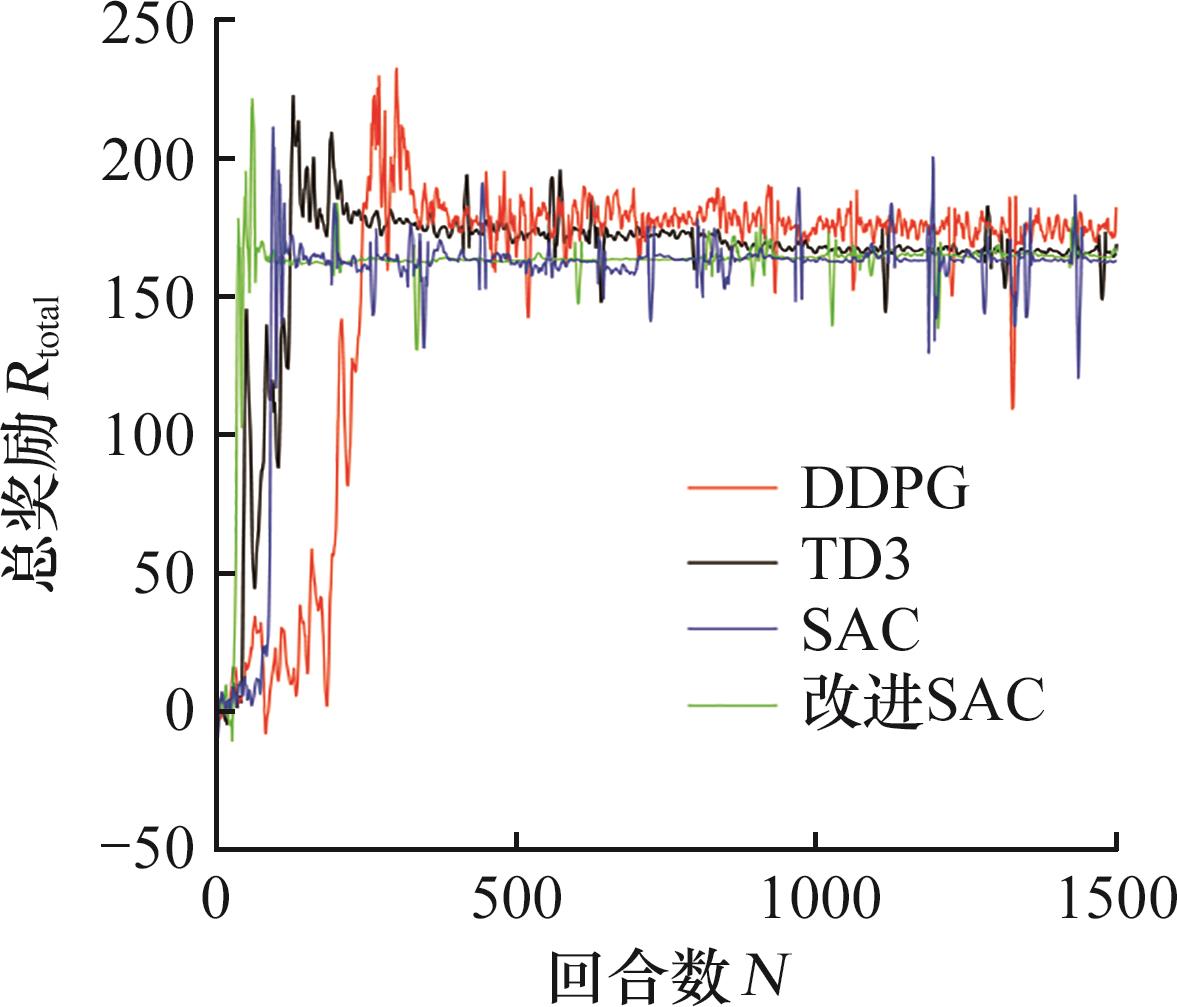
图7 回合数-奖励对比曲线
Fig.7 Episode vs Reward Comparison Curve
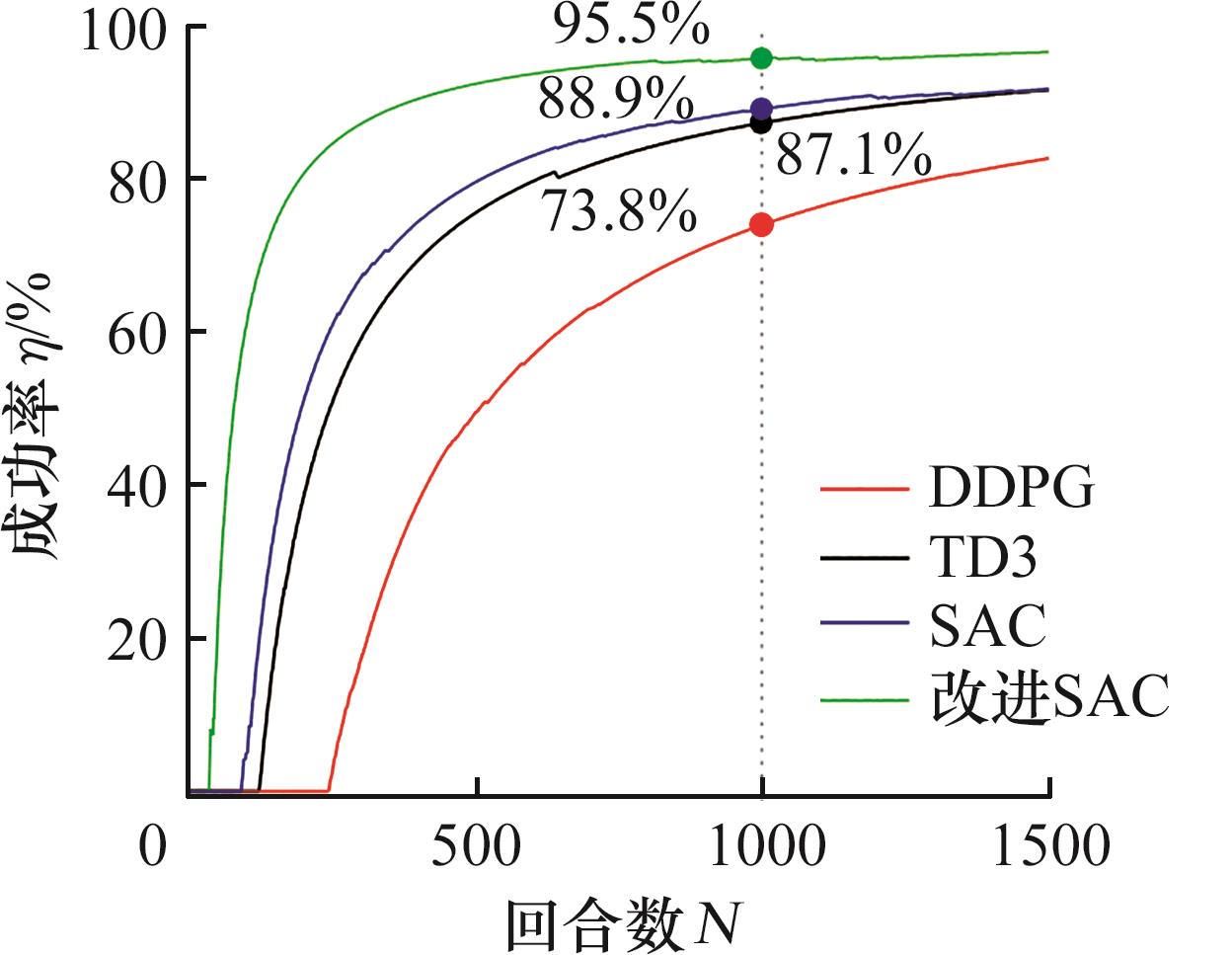
图8 回合数-成功率对比曲线
Fig.8 Episode vs success rate comparison curve
| DDPG | TD3 | SAC | 改进SAC | |
|---|---|---|---|---|
| 成功率/% | 82.46 | 91.44 | 91.53 | 96.33 |
表2 不同的DRL算法路径规划结果对比
Tab.2 Comparison of path planning results of different DRL algorithms
| DDPG | TD3 | SAC | 改进SAC | |
|---|---|---|---|---|
| 成功率/% | 82.46 | 91.44 | 91.53 | 96.33 |
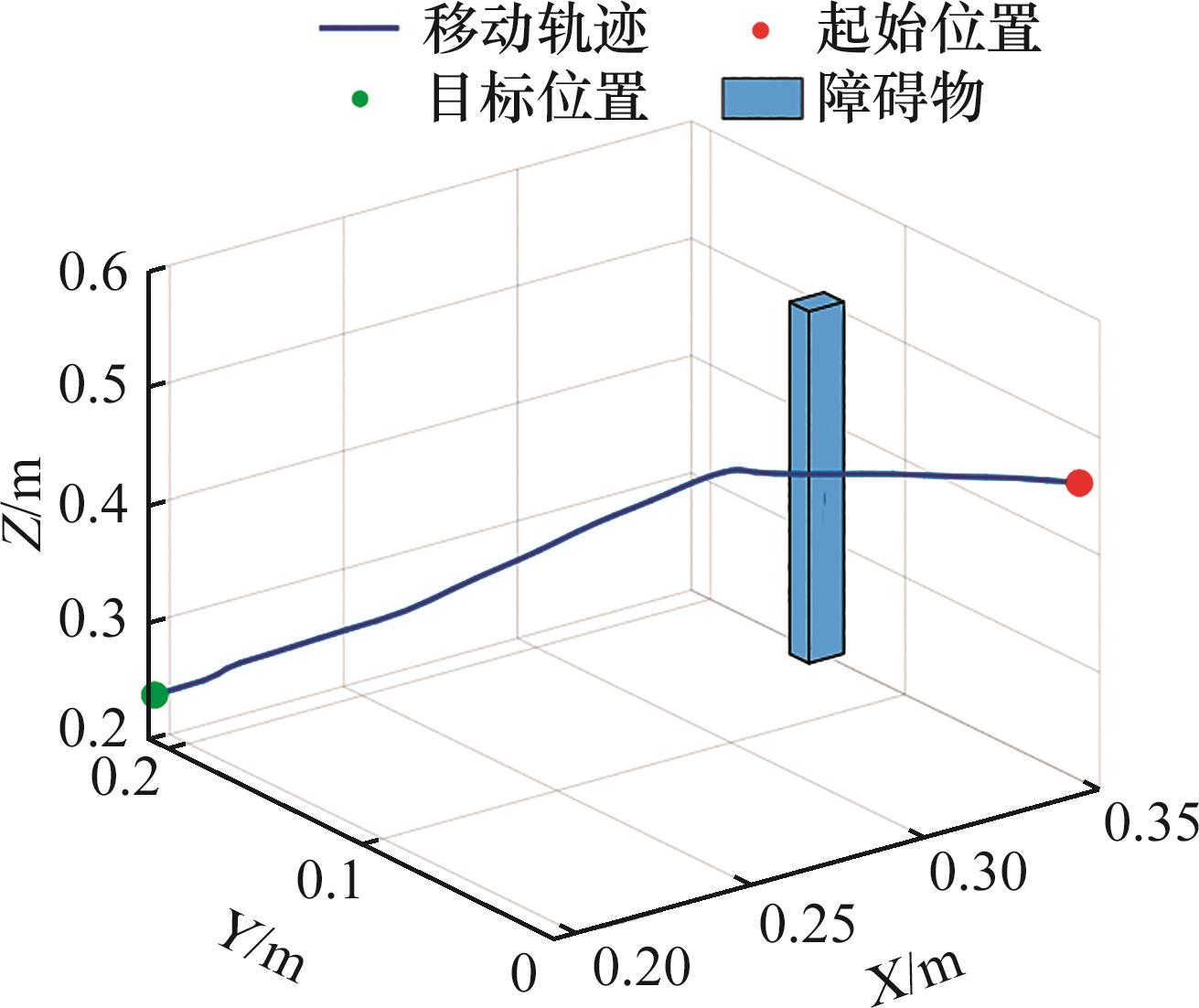
图9 六轴机械臂末端运动路径图
Fig.9 End-effector motion path diagram of a six-axis robotic arm
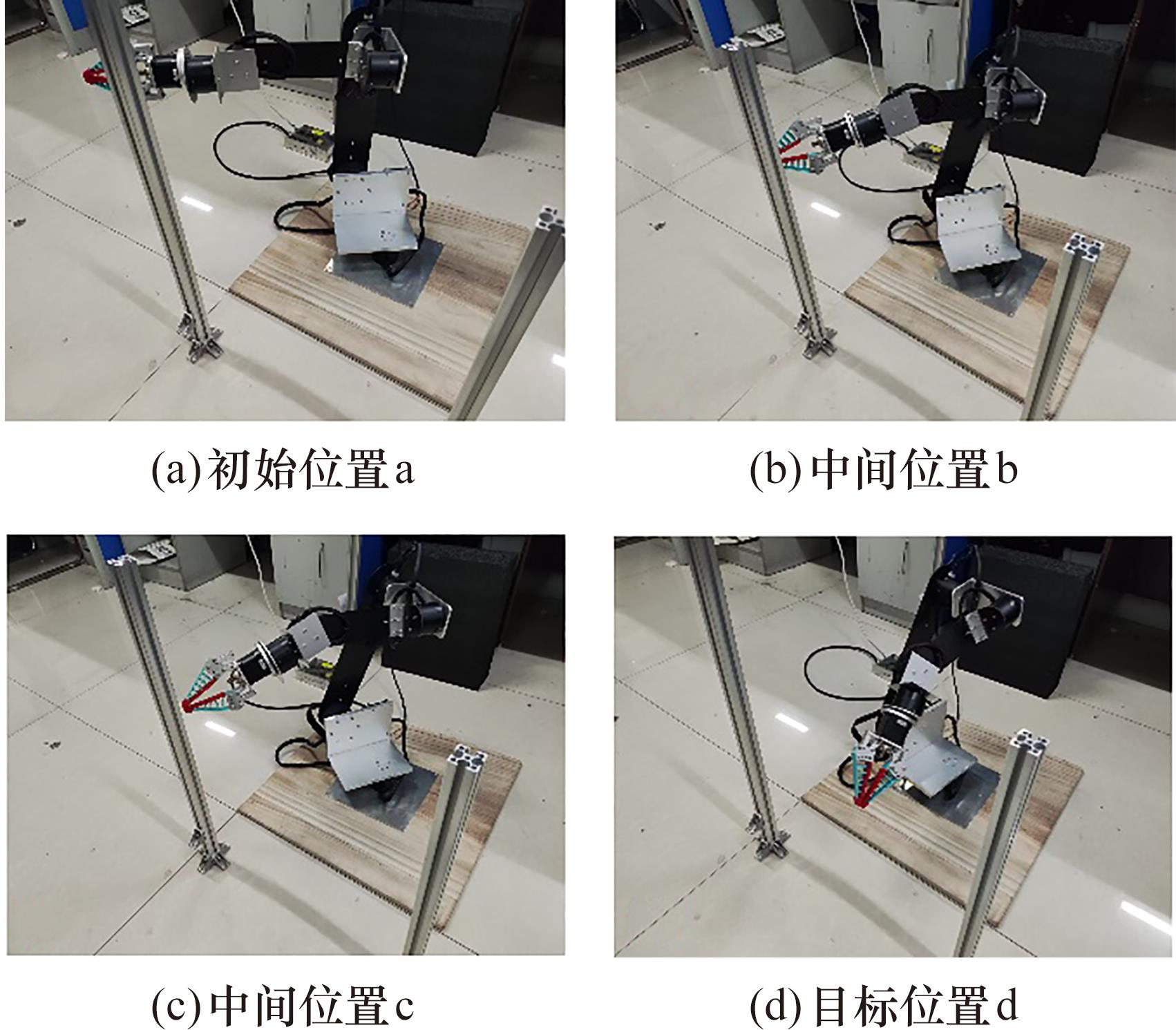
图10 六轴机械臂路径规划实验
Fig.10 Six-axis robotic arm path planning experiment
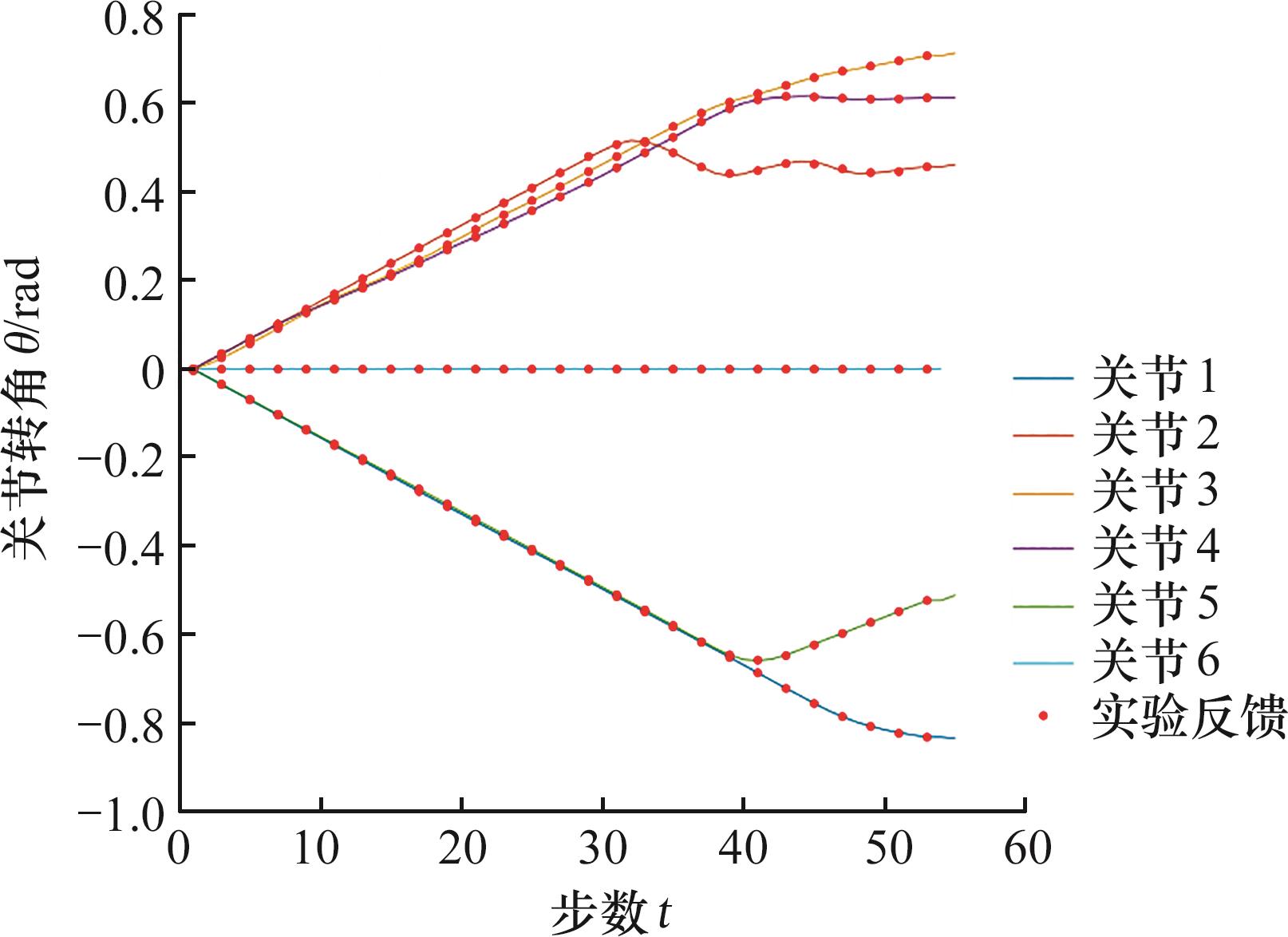
图11 六轴机械臂关节转角仿真曲线(实线)与关节角度测量曲线(点线)的对比
Fig.11 Comparison of joint angle simulation curve (solid line) and joint angle measurement curve (dashed line) for a six-axis robotic arm
| [1] | LIU Y C, HUANG C Y.DDPG-based Adaptive Robust Tracking Control for Aerial Manipulators with Decoupling Approach[J].IEEE Transactions on Cybernetics, 2021(99):1-14. |
| [2] | ALI A A, SHI J F, ZHU Z H.Path Planning of 6-DOF Free-floating Space Robotic Manipulators Using Reinforcement Learning[J].Acta Astronautica, 2024, 224:367-378. |
| [3] | 戴晟潭,王寅,尚晨晨.基于深度强化学习的多无人车协同路径规划方法[J/OL].北京航空航天大学学报, 2024.(2024-09-10)[2025-04-08]. . |
| DAI Shengtan, WANG Yin, SHANG Chenchen.Multi-UAV Collaborative Path Planning Method Based on Deep Reinforcement Learning[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 2024. (2024-09-10)[2025-04-08]. . | |
| [4] | 陈学松,杨宜民.强化学习研究综述[J].计算机应用研究, 2010, 27(8):2834-2838. |
| CHEN Xuesong, YANG Yimin. A Review of Reinforcement Learning Research[J]. Computer Applications and Research, 2010, 27(8):2834-2838. | |
| [5] | 李永迪,李彩虹,张耀玉,等.基于改进SAC算法的移动机器人路径规划[J].计算机应用, 2022, 43(2):654-660. |
| LI Yongdi, LI Caihong, ZHANG Yaoyu, et al. Path Planning of Mobile Robots Based on the Improved SAC algorithm[J]. Computer Applications, 2022, 43(2):654-660. | |
| [6] | 刘正发.面向局部路径规划的深度强化学习移动机器人导航[D].贵阳:贵州大学,2021. |
| LIU Zhengfa. Deep Reinforcement Learning-based Mobile Robot Navigation for Local Path Planning[D]. Guiyang: Guizhou University, 2021. | |
| [7] | 裴结安.基于深度强化学习的机械臂动态避障规划策略研究[D].南昌:华东交通大学,2022. |
| PEI Jiean. Research on Dynamic Obstacle Avoidance Planning Strategy of Robotic Arm Based on Deep Reinforcement Learning[D]. Nanchang:East China Jiaotong University, 2022. | |
| [8] | ZHANG Y, CHEN P.Path Planning of a Mobile Robot for a Dynamic Indoor Environment Based on an SAC-LSTM Algorithm[J].Sensors, 2023, 23(24): 9802. |
| [9] | KHALIL W, KLEINFINGER J.A New Geometric Notation for Open and Closed-loop Robots[C]∥IEEE International Conference on Robotics & Automation.San Francisco, 1986:1174-1179. |
| [10] | 靳雁霞,乔星宇,张翎,等.布料与刚体模型间的空间网格碰撞检测方法[J].中国图象图形学报, 2024, 29(10):3144-3156. |
| JIN Yanxia, QIAO Xingyu, ZHANG Ling, et al. A Spatial Mesh Collision Detection Method Between Cloth and Rigid Body Models[J]. Journal of Image and Graphics, 29(10), 3144-3156.. | |
| [11] | CAO X, ZOU X, JIA C,et al.RRT-based Path Planning for an Intelligent Litchi-picking Manipulator[J].Computers and Electronics in Agriculture, 2019, 156:105-118. |
| [12] | SUTTON R S, BARTO A G.Reinforcement Learning: an Introduction[J].IEEE Transactions on Neural Networks, 1998, 9(5):1054. |
| [13] | BELLMAN R. A Markovian Decision Process[J]. Journal of Mathematics and Mechanics, 1957(6): 679-684. |
| [14] | 张宇航, 陈雯柏, 张佳琪, 等. 一种面向六自由度机械臂柔顺装配的深度强化学习策略[J]. 重庆理工大学学报 (自然科学), 2025, 38(12): 148-154. |
| ZHANG Yuhang, CHEN Wenbai, ZHANG Jiaqi, et al.A Deep Reinforcement Learning Strategy for Compliant Assembly of Six-degree-of-freedom Robotic Arms[J]. Journal of Chongqing University of Technology (Natural Science), 2025, 38(12): 148-154. | |
| [15] | HAARNOJA T, ZHOU A, HARTIKAINEN K,et al.Soft Actor-Critic Algorithms and Applications[EB/OL].[2025-04-08].. |
| [16] | 何联格,李天华,聂远航,等.一种基于DDPG算法的6轴机械臂控制研究[J].重庆理工大学学报(自然科学), 2023, 37(9):134-140. |
| HE Lianluo, LI Tianhua, NIE Yuanhuang, et al. A Study on the Control of a 6-axis Robotic Arm Based on the DDPG Algorithm[J]. Journal of Chongqing University of Technology(Natural Science), 2023, 37(9), 134-140. | |
| [17] | 时高松, 赵清海, 董鑫, 等. 基于 PPO 算法的自动驾驶人机交互式强化学习方法[J]. 计算机应用研究, 2024, 41(9):2732-2736. |
| SHI Gaosong, ZHAO Qinghai, DONG Xin, et al. A Human-machine Interactive Reinforcement Learning Method for Autonomous Driving Based on the PPO Algorithm[J]. Application Research of Computers, 2024, 41(9):2732-2736. | |
| [18] | 方宝富, 余婷婷, 王浩, 等. 稀疏奖励场景下基于状态空间探索的多智能体强化学习算法[J]. 模式识别与人工智能, 2024, 37(5): 435-446. |
| FANG Baofu, YU Tingting, WANG Hao, et al.Multi-agent Reinforcement Learning Algorithm Based on State Space Exploration in Sparse Reward Scenarios[J]. Pattern Recognition and Artificial Intelligence, 2024, 37(5): 435-446. | |
| [19] | NAIK A, WAN Y, TOMAR M, et al. Reward Centering[EB/OL]. [2025-04-08].. |
| [1] | 张道德, 卢子健, 赵坤, 杨智勇. 非平坦环境下履带机器人多目标路径规划方法研究[J]. 中国机械工程, 2025, 36(02): 305-314. |
| [2] | 张志文1, 2, 刘伯威3, 张继园1, 唐杰1, 张天赐1, 2. 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划[J]. 中国机械工程, 2024, 35(06): 993-999,1009. |
| [3] | 唐炜, 孙宇, 顾金凤, 陈远. 连续切换轮系下变尺寸物料的传输模型与路径规划[J]. 中国机械工程, 2023, 34(11): 1372-1385. |
| [4] | 武星, 杨俊杰, 汤凯, 翟晶晶, 楼佩煌. 面向复合地图的移动机器人分层路径规划[J]. 中国机械工程, 2023, 34(05): 563-575. |
| [5] | 张家旭, 周时莹, 李长龙, 郭崇, 赵健. 线控四轮转向汽车自主代客泊车路径规划[J]. 中国机械工程, 2022, 33(08): 993-1000. |
| [6] | 邹裕吉, 宋豫川, 王馨坤, 王毅. 自动导向小车与加工设备多目标集成调度的聚类遗传算法[J]. 中国机械工程, 2022, 33(01): 97-108. |
| [7] | 张家骅, 李爱平, 刘雪梅. 行驶时间区间不确定的装配线物料配送路径规划[J]. 中国机械工程, 2021, 32(18): 2239-2246. |
| [8] | 路浩, 陈洋, 吴怀宇, 程磊, . 受路网和测量约束的变电站巡检机器人路径规划[J]. 中国机械工程, 2021, 32(16): 1972-1982. |
| [9] | 陈哲, 刘丰, 吴晓川, 杜悟迪. 复合材料预制体多针多向协同织造路径生成方法研究[J]. 中国机械工程, 2021, 32(10): 1151-1156. |
| [10] | 林歆悠, 周斌豪, 夏玉田. 融合动态能耗与路网信息的电动汽车充电路径规划策略[J]. 中国机械工程, 2021, 32(06): 705-713. |
| [11] | 李国民;高亮;李新宇. 不确定性环境下轨道自动导引车动态调度[J]. 中国机械工程, 2019, 30(08): 926-931. |
| [12] | 姜康;马世纪. 基于改进A*算法的线缆路径规划方法[J]. 中国机械工程, 2019, 30(06): 699-708. |
| [13] | 尹国涛1;朱政赫2;宫虎1;卢振丰2;雍华山2;刘磊3;何伟3. 基于工业机器人的汽车覆盖件柔性冲孔系统[J]. 中国机械工程, 2019, 30(04): 494-497,402. |
| [14] | 李茂月;陈月;徐光岐. 基于入位基准线的避死区自动泊车路径规划[J]. 中国机械工程, 2019, 30(01): 53-63. |
| [15] | 张笛1;钟明2;陈龙1;梁军1;葛慧敏1;谈建祥3. 基于改良C-W节约算法的甩挂运输车辆调度模型[J]. 中国机械工程, 2018, 29(19): 2352-2356. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||