


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (10): 2379-2388.DOI: 10.3969/j.issn.1004-132X.2025.10.027
张来喜1( ), 赵杨昊宇1, 朱盛杰1, 马凯威2, 徐丰羽2
), 赵杨昊宇1, 朱盛杰1, 马凯威2, 徐丰羽2
收稿日期:2024-10-16
出版日期:2025-10-25
发布日期:2025-11-05
通讯作者:
张来喜
作者简介:张来喜*(通信作者),男,1973年生,教授。研究方向为机械系统动力学、机器人建模与控制。E-mail:laixi_zh@163.com。
基金资助:
Laixi ZHANG1(), Yanghaoyu ZHAO1, Shengjie ZHU1, Kaiwei MA2, Fengyu XU2
Received:2024-10-16
Online:2025-10-25
Published:2025-11-05
Contact:
Laixi ZHANG
摘要:
针对图像引导放射治疗带来的额外辐射剂量问题,以环节动物的肌肉静水结构为启发设计了一种双驱动器仿肺软体机器人,体外模拟人体肺部的呼吸变形。对仿肺软体机器人进行了三维建模和有限元仿真,由仿真结果可知,加装轴向驱动器能增加仿肺软体机器人变形自由度,使其更趋向真实肺部变形。通过共形几何方法分析了仿肺软体机器人的变形特性,并通过实验测试了其变形性能。研究结果表明:当径向驱动器气压为1 kPa和2 kPa、轴向驱动器气压为7 kPa时,径向驱动器的z轴尺寸伸长率分别为10.95%和8.87%,所设计的仿肺软体机器人能够满足模仿肺部变形的要求。最后,通过线性拟合得到了变形程度与充气气压之间的关系式,可应用于仿肺软体机器人的变形控制。
中图分类号:
张来喜, 赵杨昊宇, 朱盛杰, 马凯威, 徐丰羽. 双驱动器仿肺软体机器人建模与变形分析[J]. 中国机械工程, 2025, 36(10): 2379-2388.
Laixi ZHANG, Yanghaoyu ZHAO, Shengjie ZHU, Kaiwei MA, Fengyu XU. Modeling and Deformation Analysis of Dual Actuator Lung-like Soft Robots[J]. China Mechanical Engineering, 2025, 36(10): 2379-2388.
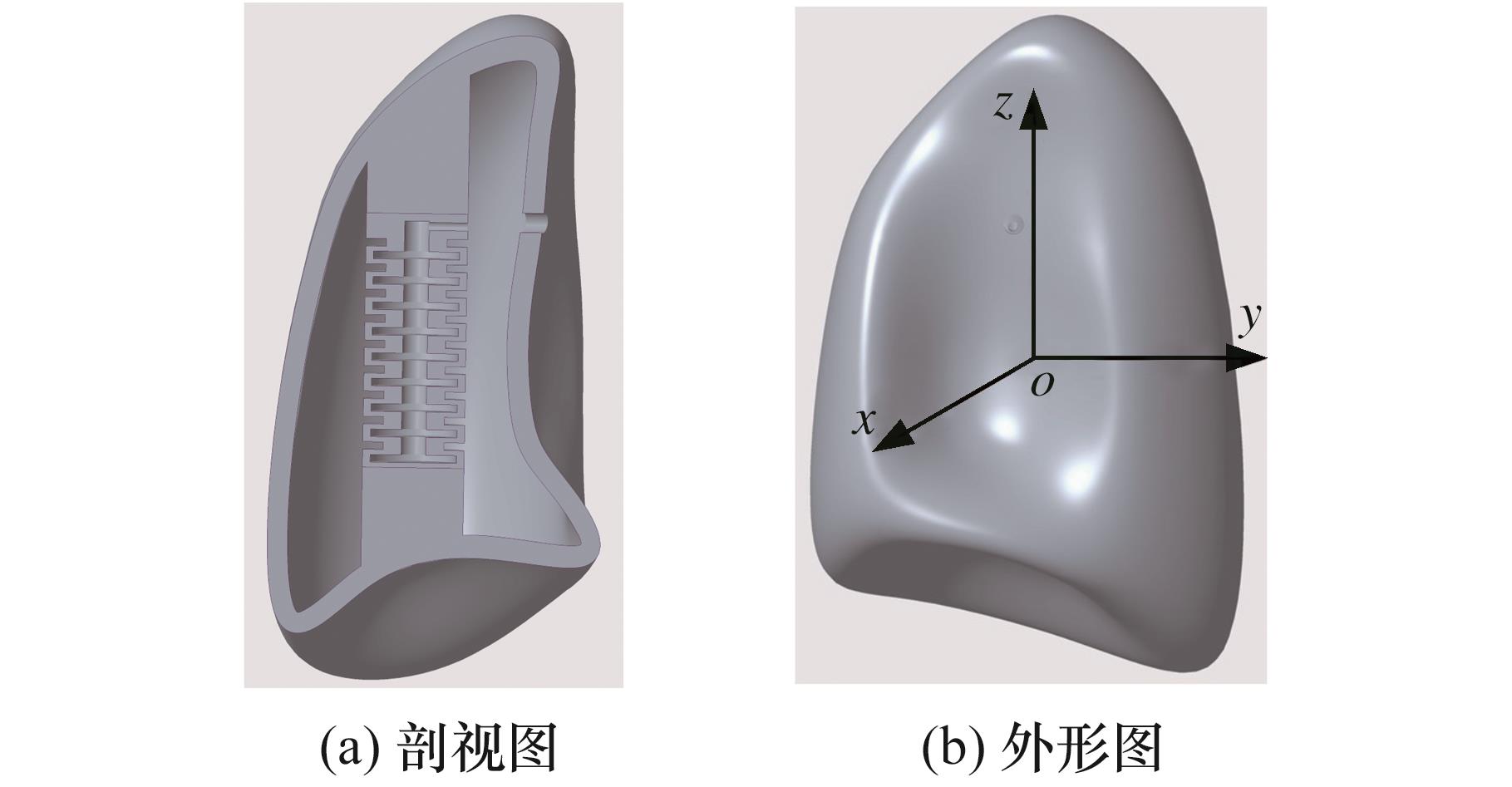
图1 双驱动器仿肺软体机器人的结构
Fig.1 Structure of lung-like soft robot withdual ctuators
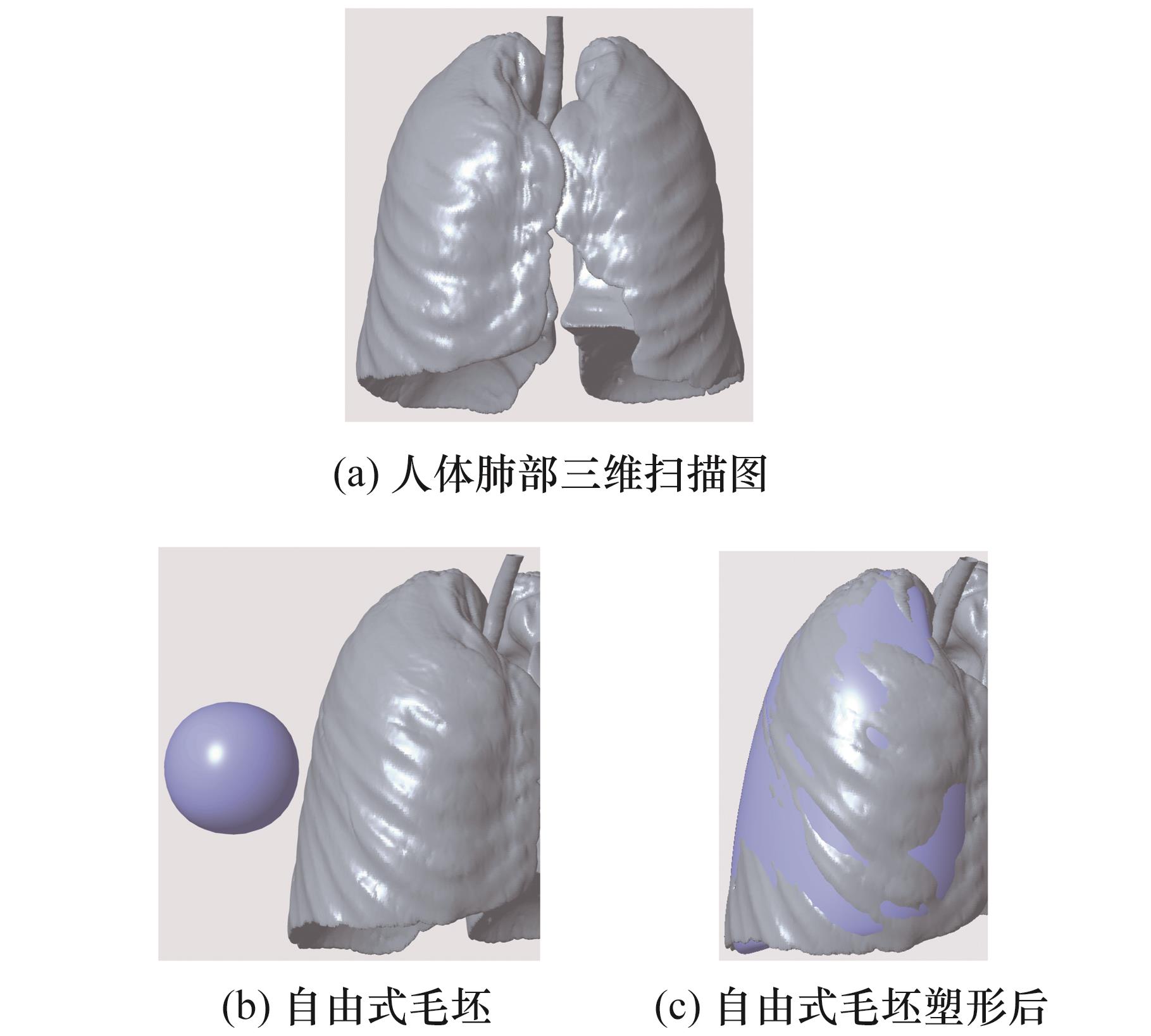
图2 右肺的三维建模
Fig.2 3D modeling of the right lung
| 方向 | 男性平均尺寸 | 女性平均尺寸 | 仿肺软体 机器人尺寸 |
|---|---|---|---|
| x轴(左右) | 11.94±0.58 | 11.03±0.80 | 12.5 |
| y轴(前后) | 15.57±2.27 | 13.35±0.22 | 16.5 |
| z轴(上下) | 25.94±3.04 | 23.97±2.16 | 26.0 |
表1 人体肺部平均尺寸与仿肺软体机器人尺寸对比 (cm)
Tab.1 Comparison of the average human lung size with the size of the lung-like soft robot
| 方向 | 男性平均尺寸 | 女性平均尺寸 | 仿肺软体 机器人尺寸 |
|---|---|---|---|
| x轴(左右) | 11.94±0.58 | 11.03±0.80 | 12.5 |
| y轴(前后) | 15.57±2.27 | 13.35±0.22 | 16.5 |
| z轴(上下) | 25.94±3.04 | 23.97±2.16 | 26.0 |
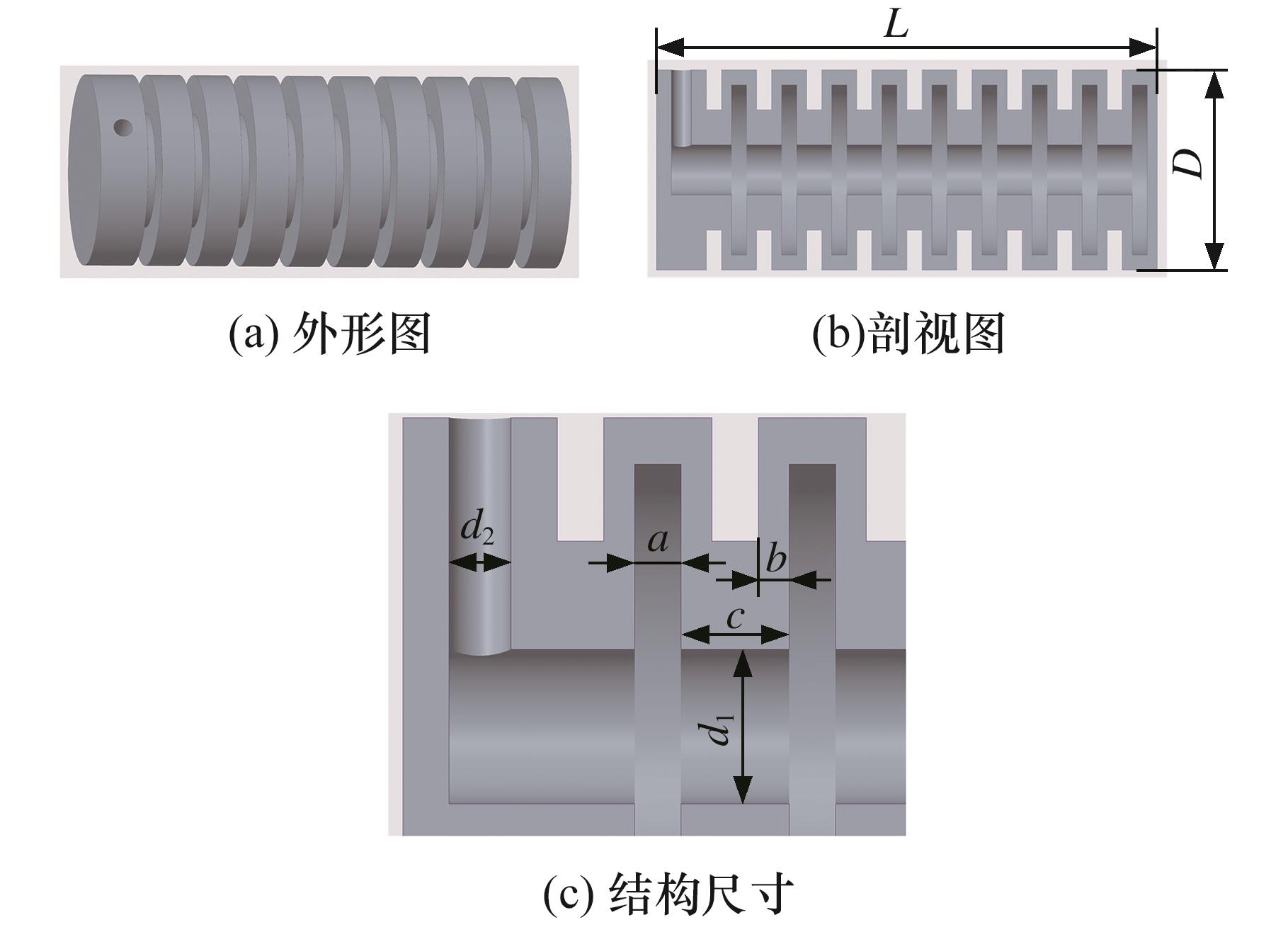
图3 轴向驱动器结构
Fig.3 Structure of axial actuators
| 本构模型 | 材料参数 | 试样1 | 试样2 | 试样3 | 平均值 |
|---|---|---|---|---|---|
| Mooney-Rivlin | C10 | 0.2761 | 0.2585 | 0.2791 | 0.2712 |
| C01 | |||||
| Yeoh | C10 | 0.0106 | 0.0124 | 0.0117 | 0.0116 |
| C20 | 0.0312 | 0.0341 | 0.0335 | 0.0329 |
表2 两种本构模型材料参数
Tab.2 Material parameters of the two superelastic models
| 本构模型 | 材料参数 | 试样1 | 试样2 | 试样3 | 平均值 |
|---|---|---|---|---|---|
| Mooney-Rivlin | C10 | 0.2761 | 0.2585 | 0.2791 | 0.2712 |
| C01 | |||||
| Yeoh | C10 | 0.0106 | 0.0124 | 0.0117 | 0.0116 |
| C20 | 0.0312 | 0.0341 | 0.0335 | 0.0329 |
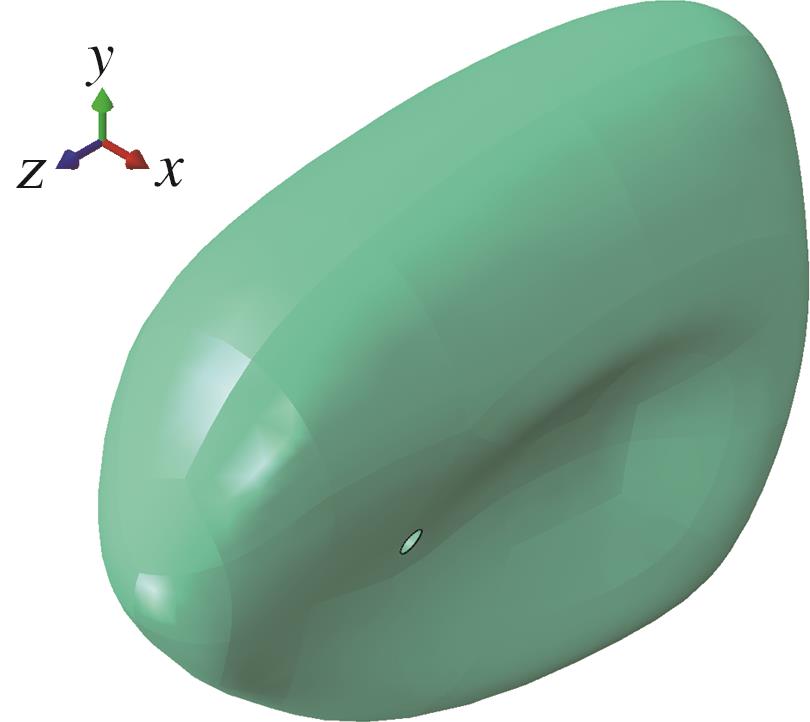
图4 径向驱动器坐标系定义
Fig.4 Coordinate definition of the radial actuator
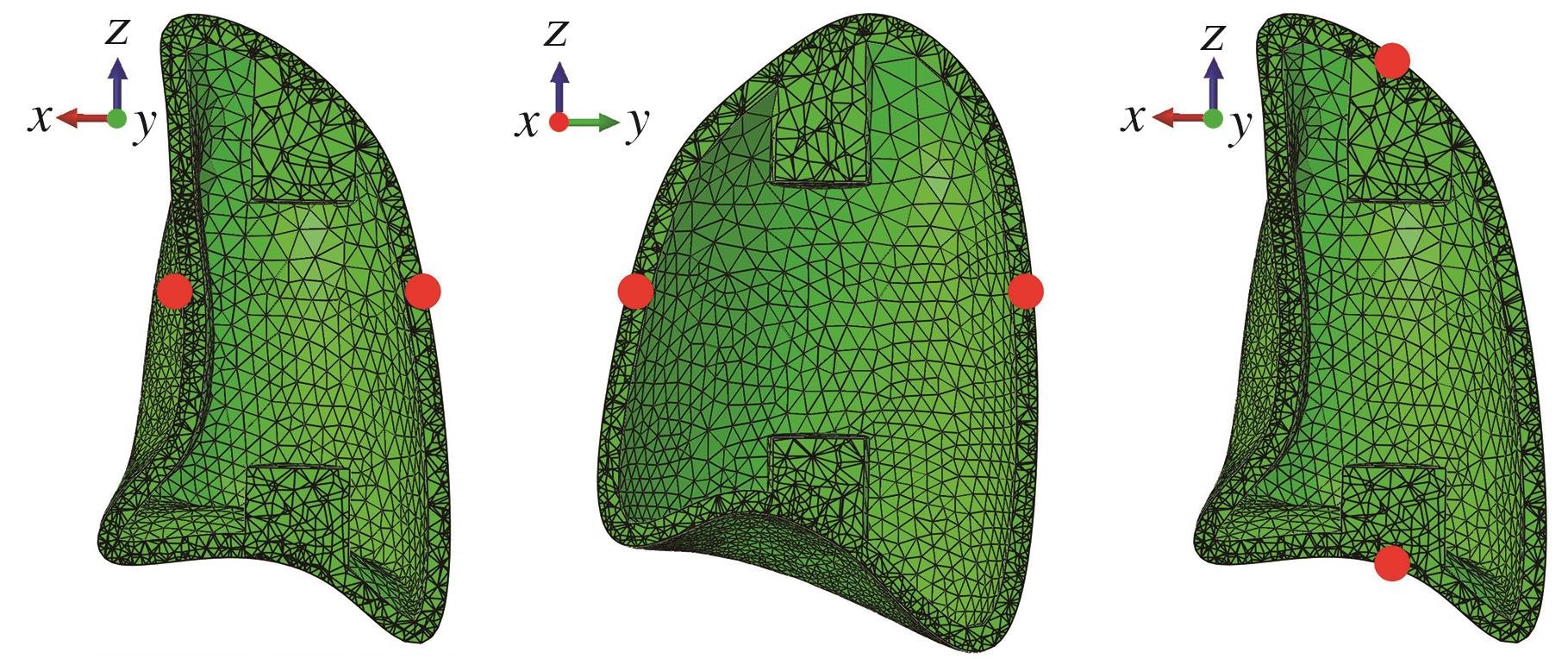
图5 径向驱动器特征点的选取
Fig.5 Feature points selection of the radial actuator

图6 径向驱动器变形对比
Fig.6 Deformation comparison of the radial actuator
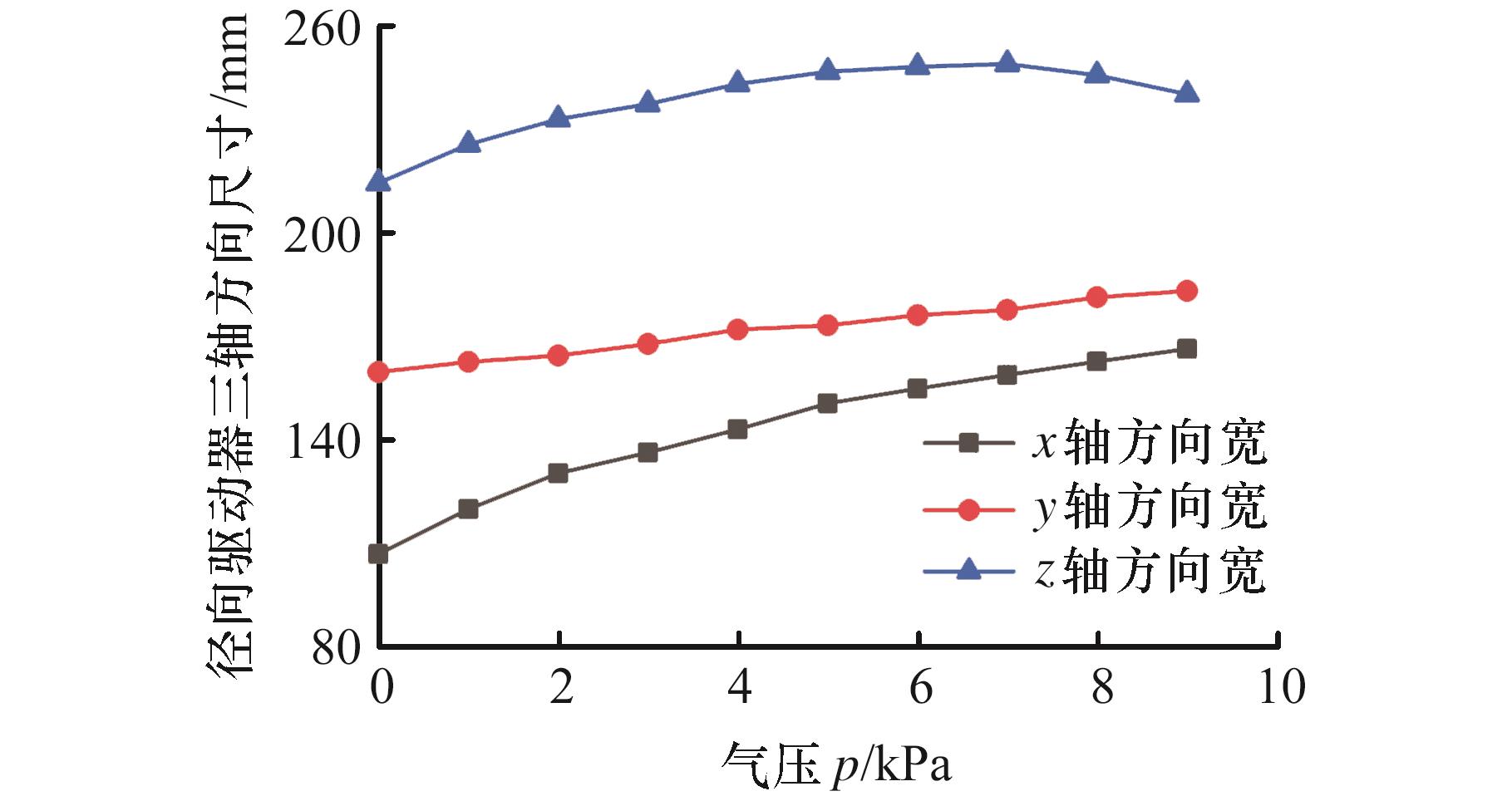
图7 径向驱动器变形趋势
Fig.7 Deformation trend of radial driver
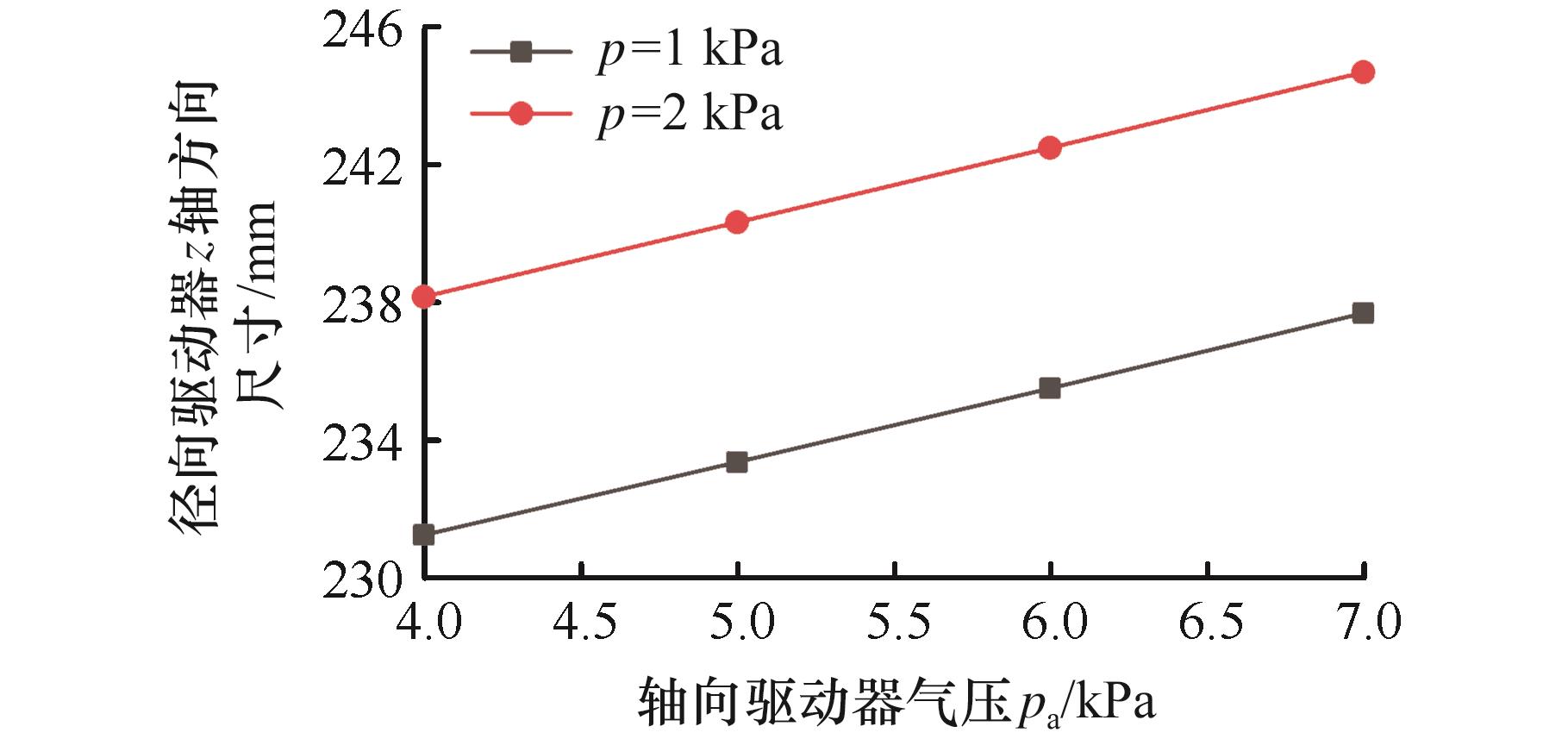
图8 固定径向驱动器气压时轴向驱动器变形
Fig.8 Axial actuator deformation when radial actuator pressure is fixed
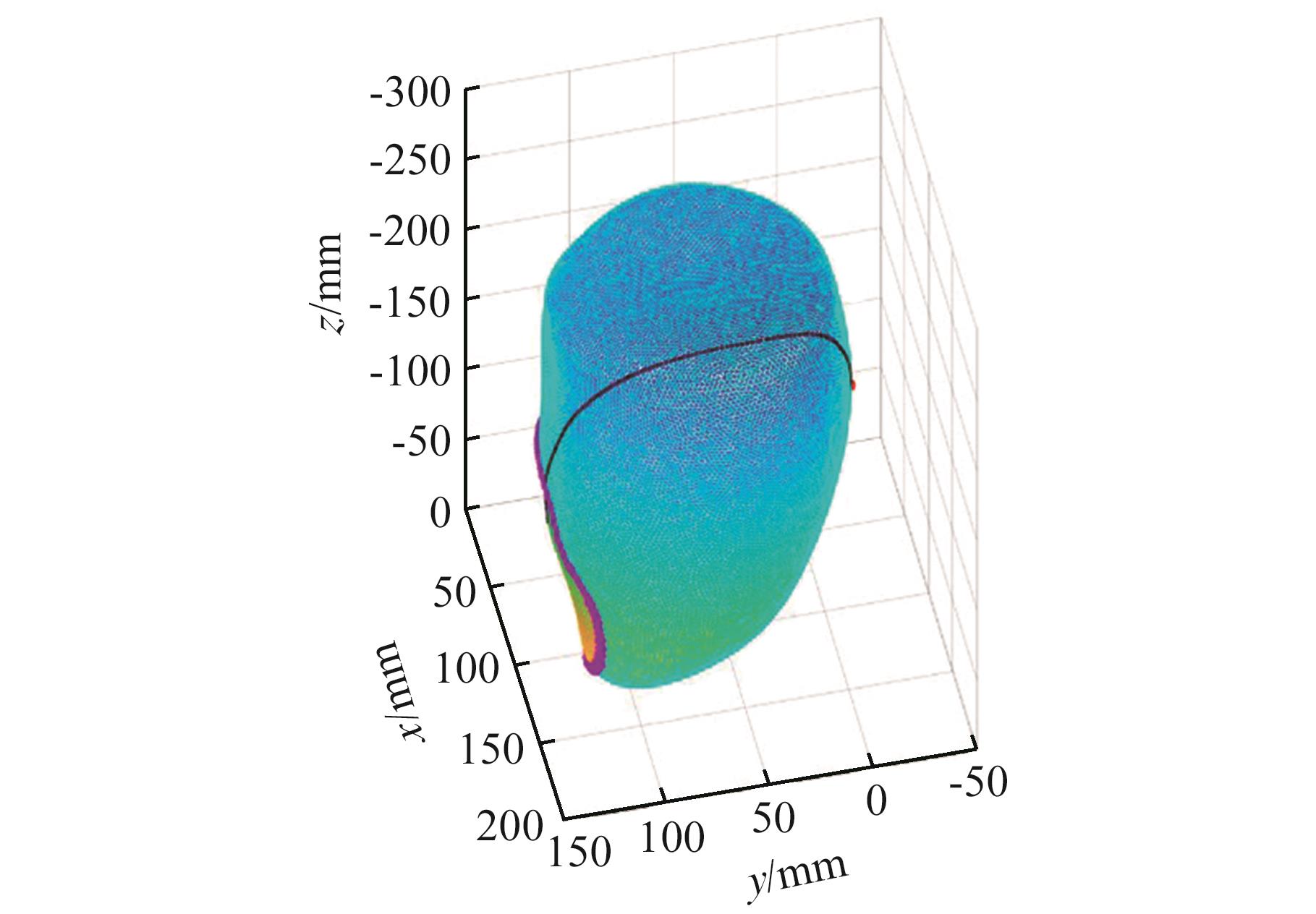
图9 沿最短路径画出的曲面新边界
Fig.9 New boundary of a surface drawn along the shortest path
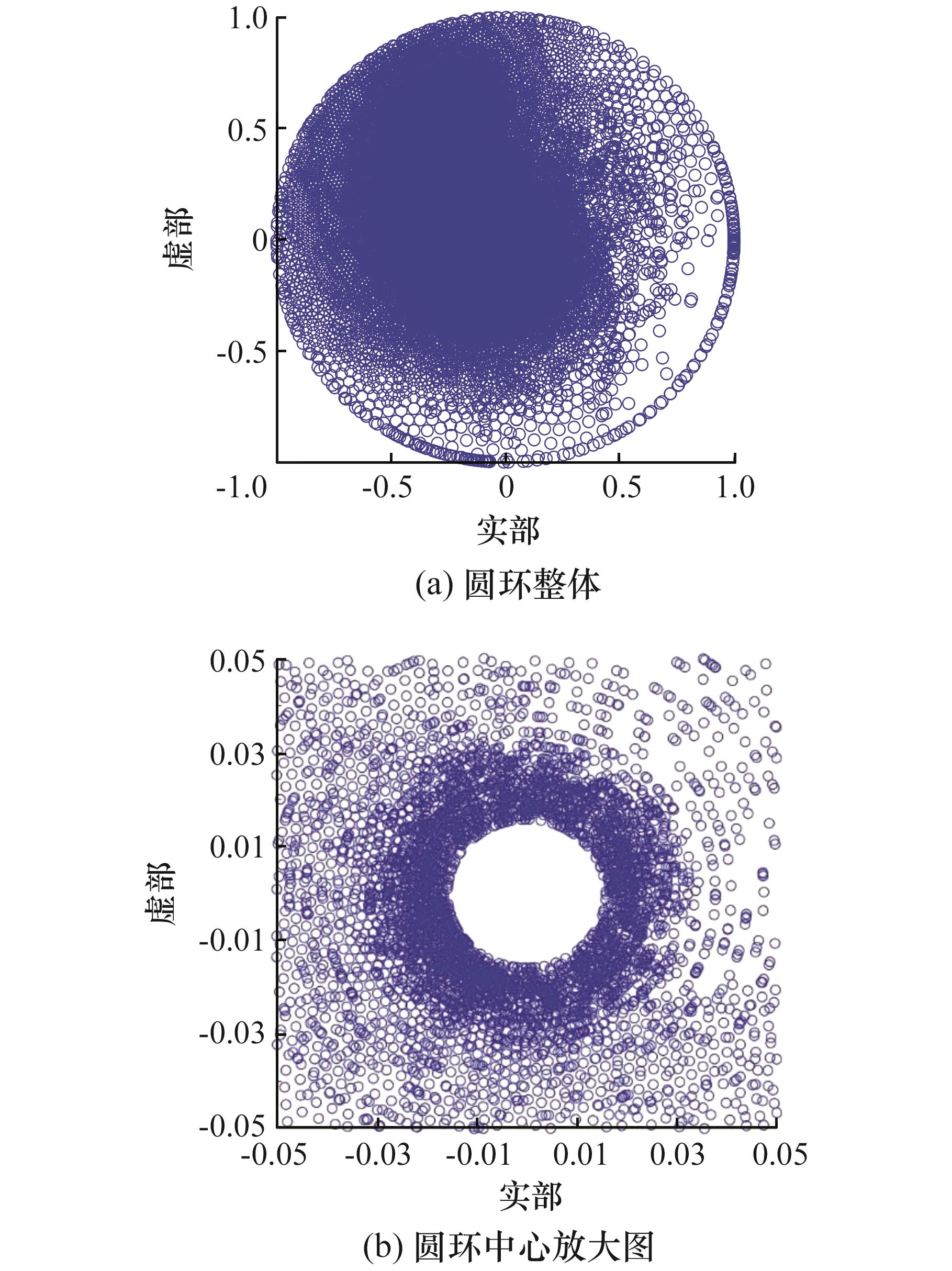
图10 共形参数化所得圆环
Fig.10 The ring from conformal parameterization
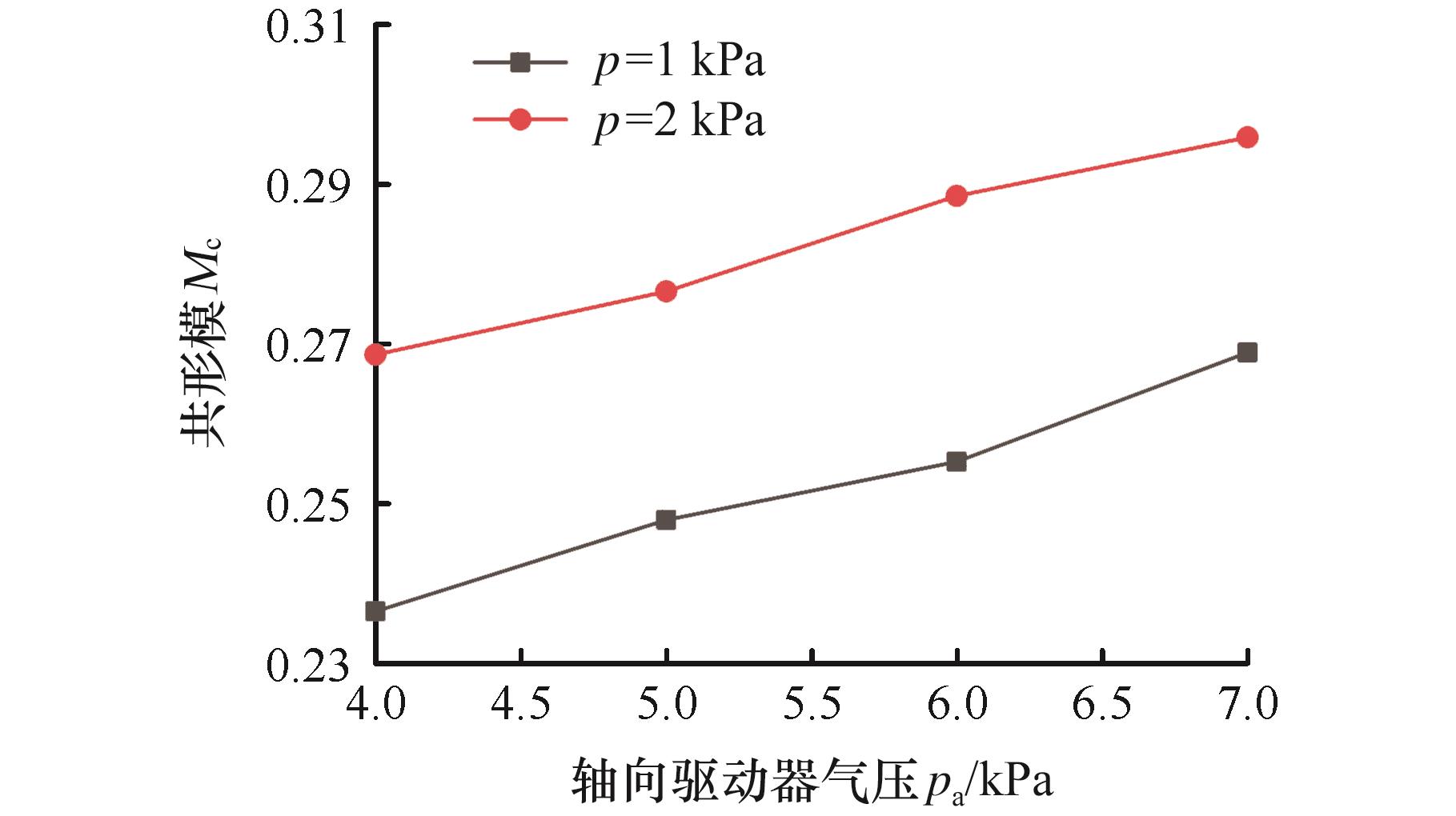
图11 气压与共形模关系
Fig.11 The relationship between pressure and conformal modulars

图12 径向驱动器左侧上半部分模具
Fig.12 The upper mould of the left actuator
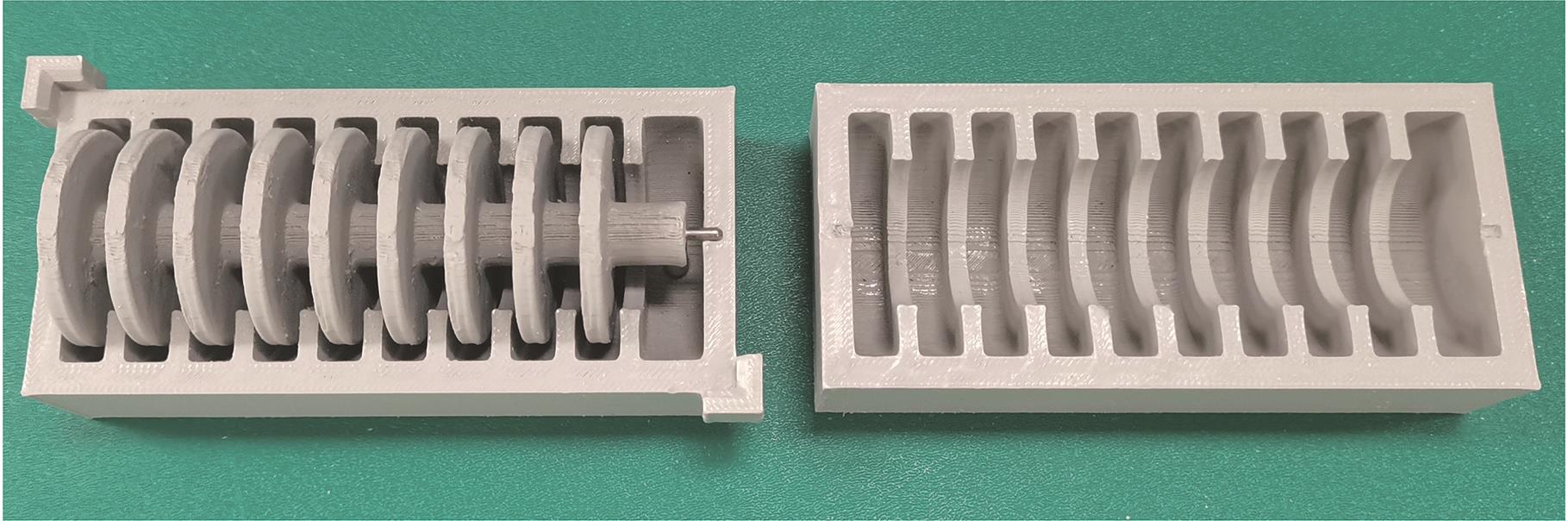
图13 轴向驱动器模具
Fig.13 axial actuator moulds
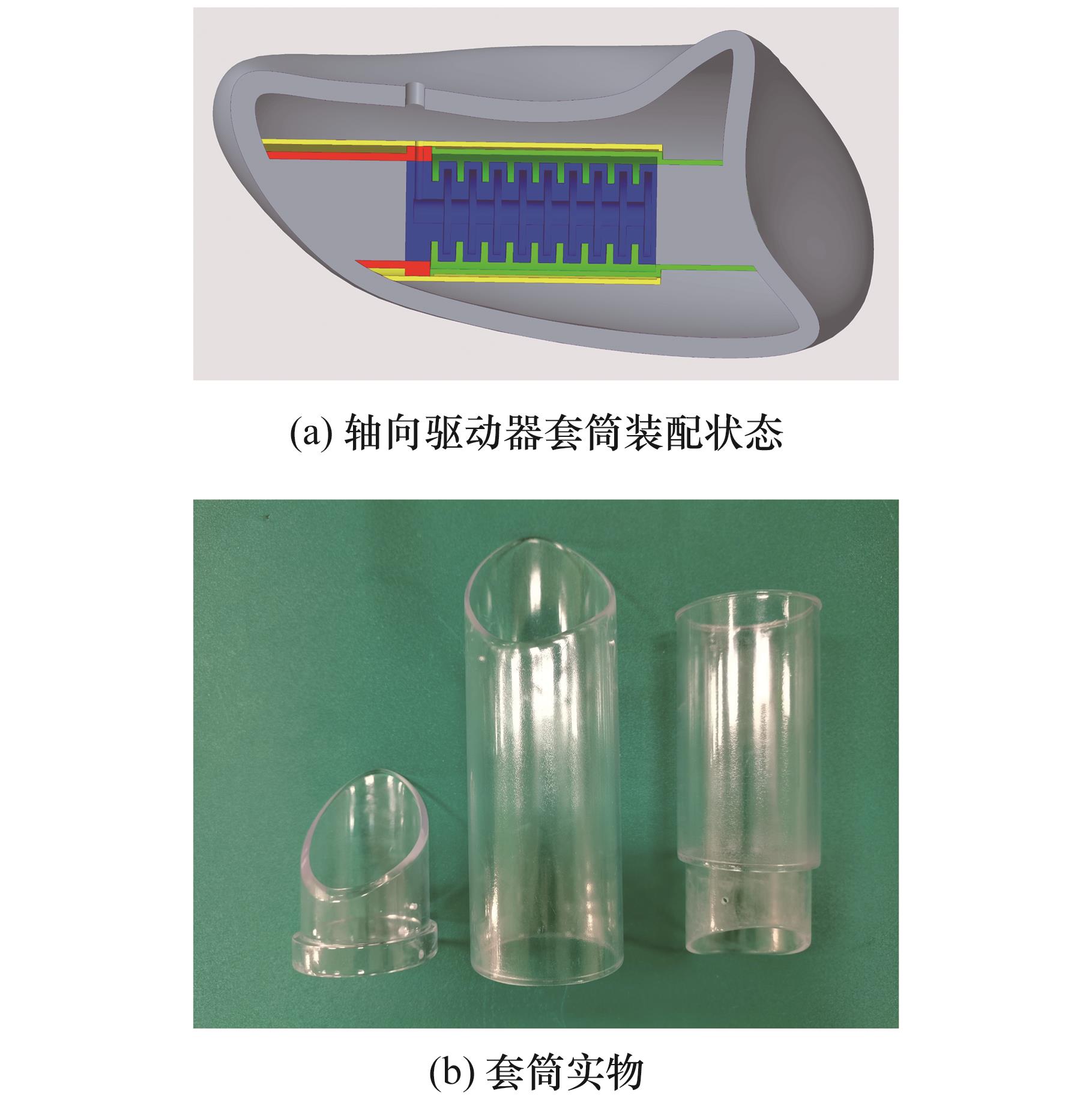
图14 轴向驱动器导向筒
Fig.14 Axial actuator guide cylinder
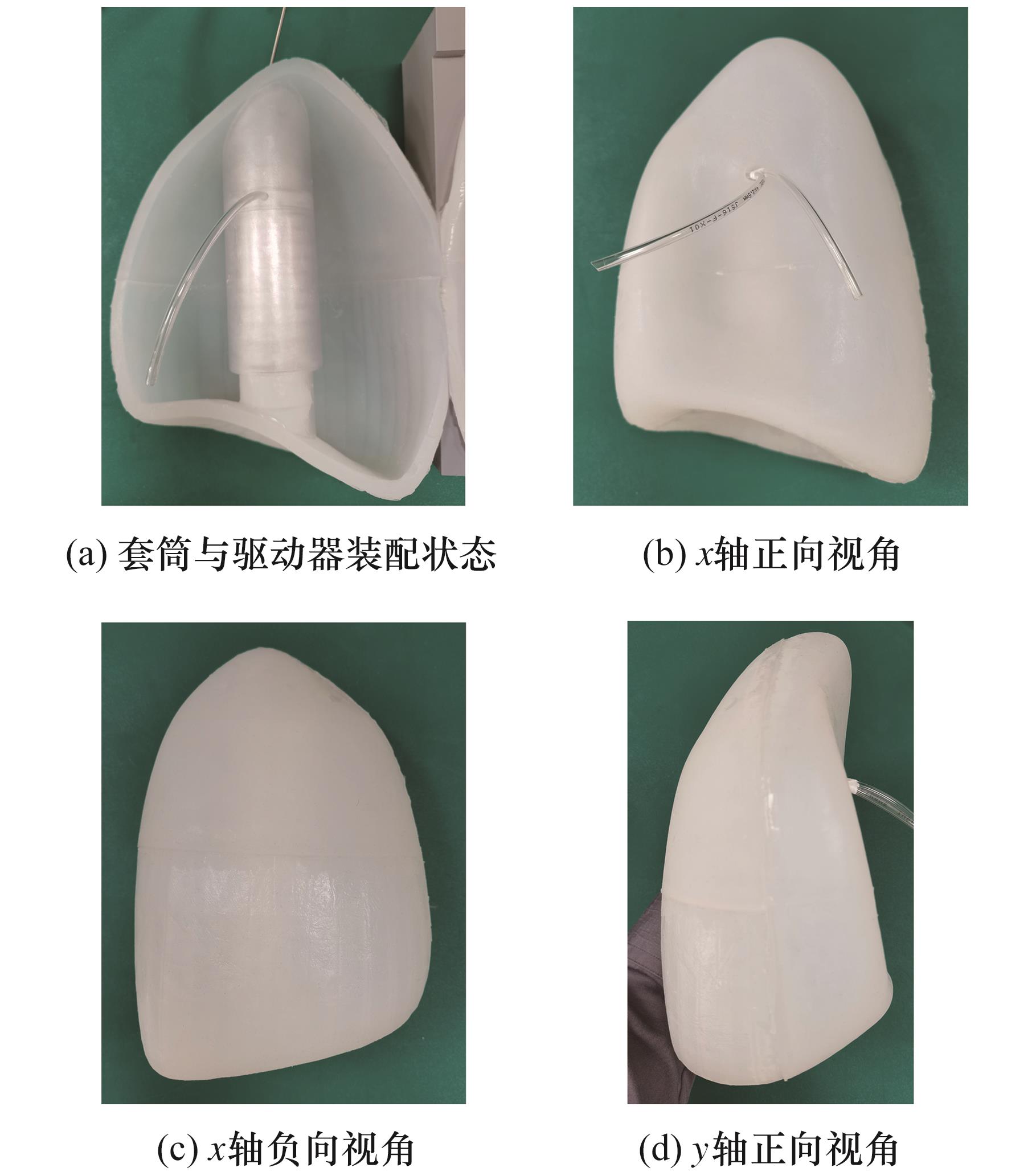
图15 双驱动器仿肺软体机器人样机
Fig.15 Prototype of dual actuators lung-like soft robot
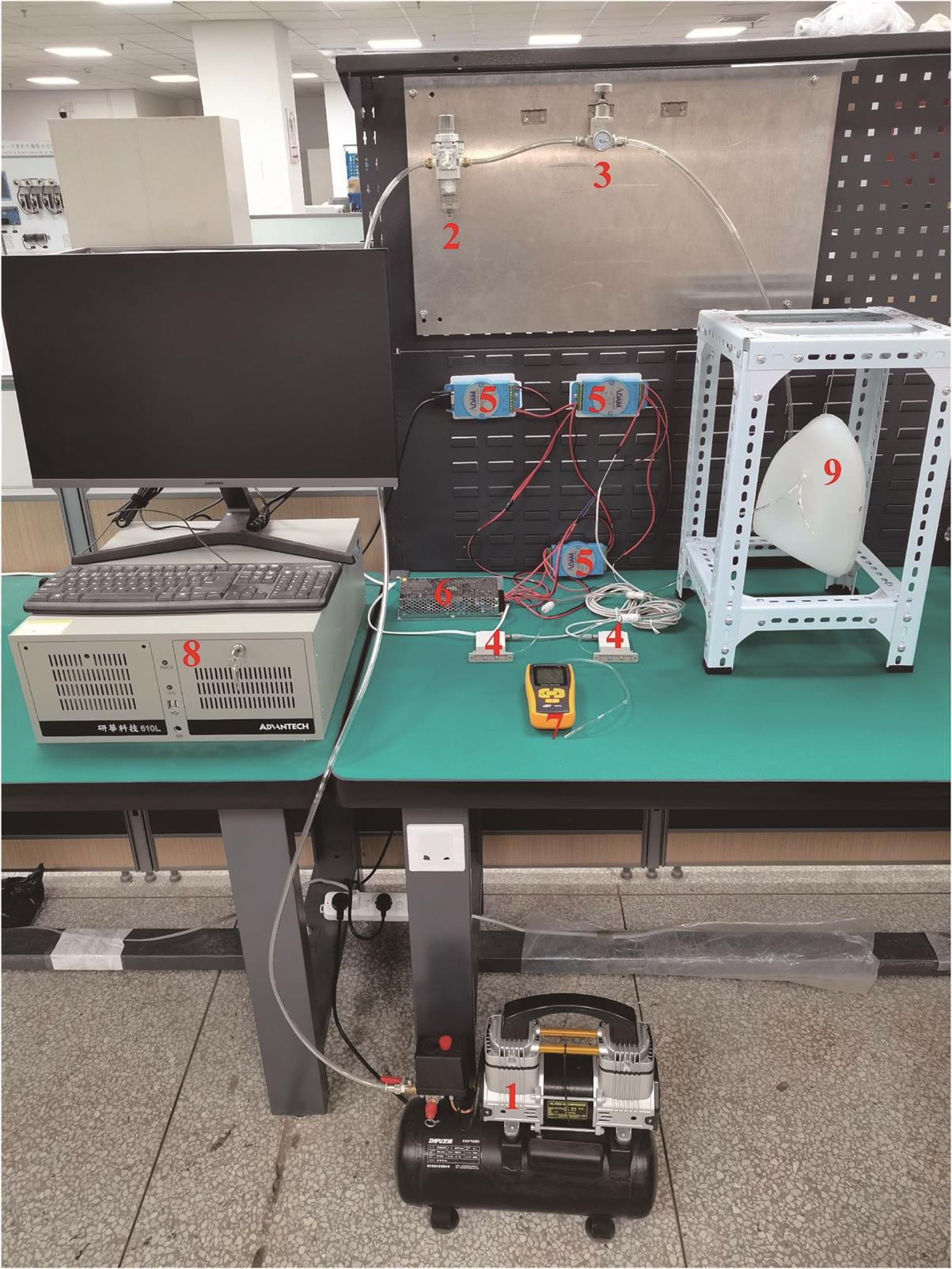
图16 气动试验平台1.气泵 2.过滤减压阀 3.调压阀 4.电气压力比例阀5.控制模块 6.电源模块 7.数显气压表8.上位机 9.仿肺软体机器人
Fig.16 Pneumatic test platform
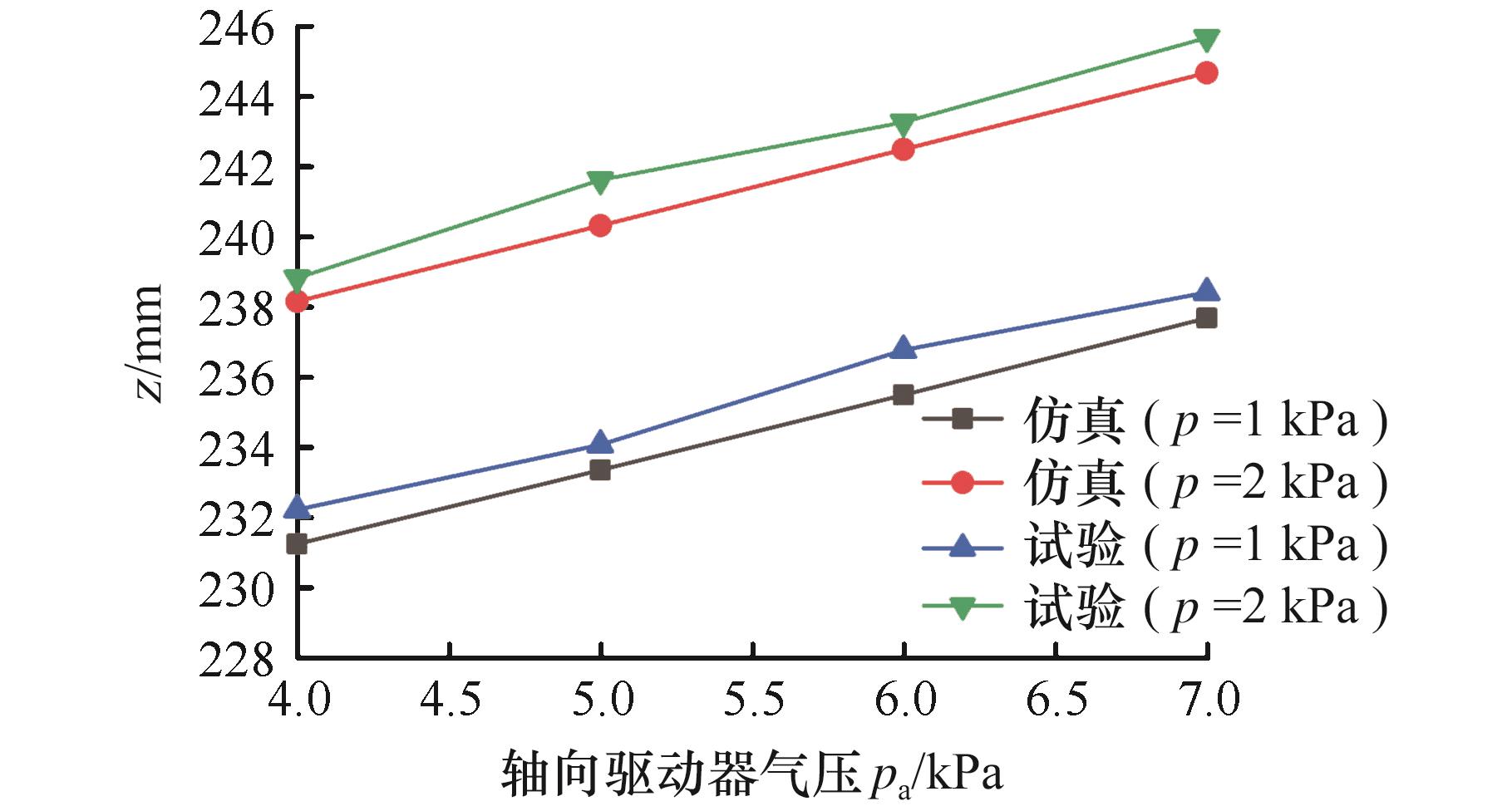
图17 双驱动器仿肺软体机器人z轴方向尺寸变化
Fig.17 Size change in the z-axis direction of the dual-actuator lung-like soft robot
| 数据来源 | 气压p/kPa | x/mm | y/mm |
|---|---|---|---|
| 有限元仿真 | 1 | 119.9 | 162.6 |
| 2 | 130.3 | 164.7 | |
| 充气试验 | 1 | 121.7 | 163.8 |
| 2 | 131.6 | 166.3 |
表3 双驱动器仿肺机器人x、y轴方向尺寸变化
Tab.3 Size changes in x and y axes of the dual-actuator lung-like robot
| 数据来源 | 气压p/kPa | x/mm | y/mm |
|---|---|---|---|
| 有限元仿真 | 1 | 119.9 | 162.6 |
| 2 | 130.3 | 164.7 | |
| 充气试验 | 1 | 121.7 | 163.8 |
| 2 | 131.6 | 166.3 |
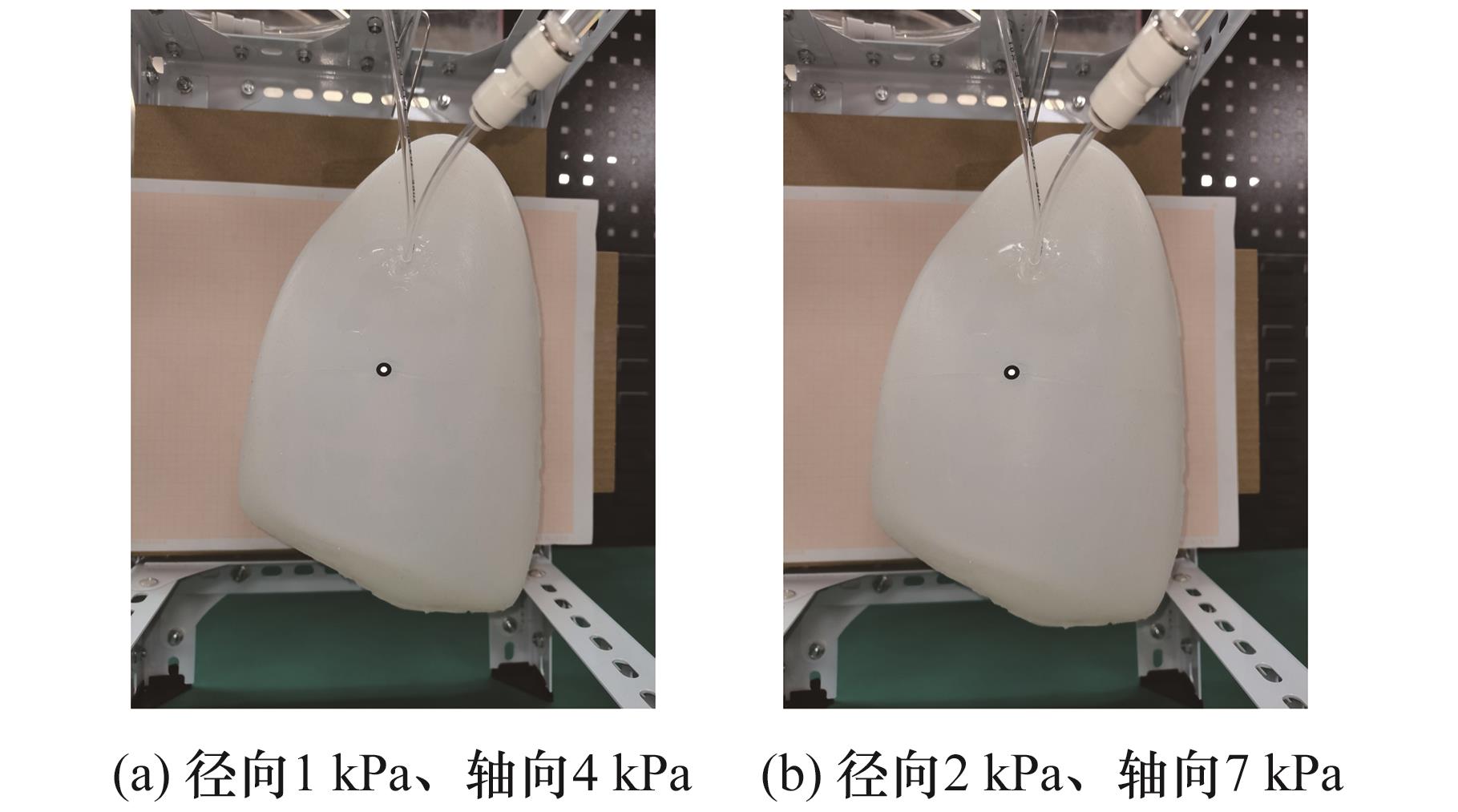
图18 仿肺软体机器人两种变形状态
Fig.18 Two inflatable satus of the lung-like soft robot
| [1] | SAVANOVIĆ M, BOJAN Š, DRAŽAN J, et al. Quantification of Lung Tumor Motion and Optimization of Treatment[J]. Journal of Biomedical Physics & Engineering, 2023, 13(1):65-76. |
| [2] | ZHANG Yawei, JIANG Zhuoran, ZHANG You. A Review on 4D Cone‐beam CT (4D‐CBCT) in Radiation Therapy:Technical Advances and Clinical Applications[J]. Medical Physics, 2024, 51(8):5164-5180. |
| [3] | DZIERMA Y, MIKULLA K, RICHTER P, et al. Imaging Dose and Secondary Cancer Risk in Image-guided Radiotherapy of Pediatric Patients[J]. Radiation Oncology, 2018, 13:1-14. |
| [4] | SANTOS A A, de FREITAS SILVA B S, CORREIA F F N, et al. Optimizing Cone-beam Computed Tomography Exposure for an Effective Radiation Dose and Image Quality Balance[J]. Imaging Science in Dentistry, 2024, 54(2):159-169. |
| [5] | SPARKS S S, OBANDO A G, LI Y, et al. 3D‐printed Biomimetic and Bioinspired Soft Actuators[J]. IET Cyber‐systems and Robotics, 2024, 6(4):e70001. |
| [6] | HORVATH M A, HU L, MUELLER T, et al. An Organosynthetic Soft Robotic Respiratory Simulator[J]. APL Bioengineering, 2020, 4(2):026108. |
| [7] | NIOUTSIKOU E, SEPPENWOOLDE Y, SYMONDS‐TAYLER J R N, et al. Dosimetric Investigation of Lung Tumor Motion Compensation with a Robotic Respiratory Tracking System:an Experimental Study[J]. Medical Physics, 2008, 35(4):1232-1240. |
| [8] | 丛明,毕聪,王明昊,等.面向手功能康复训练的软体机器人设计[J].中国机械工程,2022,33(8):883-889. |
| CONG Ming, BI Cong, WANG Minghao, et al. Design of Soft Robots for Hand Function Rehabilitation Training[J]. China Mechanical Engineering, 2022,33(8):883-889. | |
| [9] | MCCANDLESS M, PERRY A, DIFILIPPO N, et al. A Soft Robot for Peripheral Lung Cancer Diagnosis and Therapy[J]. Soft Robotics, 2022, 9(4):754-766. |
| [10] | XAVIER M S, TAWK C D, ZOLFAGHARIAN A, et al. Soft Pneumatic Actuators:a Review of Design, Fabrication, Modeling, Sensing, Control and Applications[J]. IEEE Access, 2022, 10:59442-59485. |
| [11] | DELLA SANTINA C, DURIEZ C, RUS D. Model-based Control of Soft Robots:a Survey of the State of the Art and Open Challenges[J]. IEEE Control Systems Magazine, 2023, 43(3):30-65. |
| [12] | 范需,戴宁,王宏涛,等.气动网格软体驱动器弯曲变形预测方法[J].中国机械工程,2020,31(9):1108-1114. |
| FAN Xu, DAI Ning, WANG Hongtao, et al. Bending Deformation Prediction Method of Soft Actuators with Pneumatic Networks[J]. China Mechanical Engineering, 2020, 31(9):1108-1114. | |
| [13] | TANG Y, LIU S, DENG Y, et al. An Improved Method for Soft Tissue Modeling[J]. Biomedical Signal Processing and Control, 2021, 65:102367. |
| [14] | 刘佳鹏,王江北,赵威,等.多功能软体机械手的设计与建模[J].机械工程学报, 2022, 58(9):1-9. |
| LIU Jiapeng, WANG Jiangbei, ZHAO Wei, et al. Design and Modeling of Multifunctional Soft Manipulator[J]. Journal of Mechanical Engineering, 2022, 58(9):1-9. | |
| [15] | 秦任甲. 肺呼吸的力学原理探析[J].华夏医学, 2022, 35(6):135-139. |
| QIN Renjia. Research on the Mechanical Principles of Pulmonary Respiration[J]. Acta Medicinae Sinica, 2022, 35(6):135-9. | |
| [16] | 张来喜, 朱盛杰, 朱艳梅, 等. 基于无质量弹簧结构的肺组织动态建模及变形预测方法[J]. 仪器仪表学报, 2024, 45(10):209-221. |
| ZHANG Laixi, ZHU Shengjie, ZHU Yanmei, et al. Dynamic Modeling and Deformation Prediction Method of Lung Tissuebased on Massless Spring Mechanism[J]. Chinese Journal of Scientific Instrument, 2024, 45(10):209-221. | |
| [17] | NAKAMURA T, IWANAGA T. Locomotion Strategy for a Peristaltic Crawling Robot in a 2 Dimensional Space[C]∥International Conference on Robotics and Automation. Pasadena, 2008:238-243. |
| [18] | YANG S, KIM J, CHOI S J, et al. Determining Average Linear Dimension and Volume of Korean Lungs for Lung Phantom Construction[J]. Health Physics Society, 2021, 120(5):487-494. |
| [19] | 陈家照, 黄闽翔, 王学仁, 等. 几种典型的橡胶材料本构模型及其适用性[J]. 材料导报, 2015, 29(1):118-120. |
| CHEN Jiazhao, HUANG Minxiang, WANG Xueren, et al. Typical Constitutive Models of Rubber Materials and Their Ranges of Application[J]. Materials Reports, 2015, 29(1):118-120. | |
| [20] | WANG Q, WANG J, LI X, et al. Exploring Respiratory Motion Tracking Through Electrical Impedance Tomography[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70:4504712. |
| [21] | 董虎, 王保兴, 李巍, 等. 基于单向气动驱动器的软体手变形机理[J]. 东华大学学报(自然科学版), 2020, 46(2):288-296. |
| DONG Hu, WANG Baoxing, LI Wei, et al. The Deformation Mechanism of Soft Hand Based on One-way Pneumatic Actuator[J]. Journal of Donghua University (Natural Science), 2020, 46(2):288-296. | |
| [22] | 王义海, 潘广鹏, 陆艳荣, 等. 基于四维CT的呼吸门控技术分析呼吸运动对肺部肿瘤的影响[J]. 新疆医科大学学报, 2014, 37(5):581-583. |
| WANG Yihai, PAN Guangpeng, LU Yanrong, et al. Influence of Respiratory Motion Based on 4 Dimensional-CT for Lung Cancer[J]. Journal of Xinjiang Medical University, 2014, 37(5):581-583. | |
| [23] | CHOW B, LUO F. Combinatorial Ricci Flows on Surfaces[J]. Journal of Differential Geometry, 2003, 63(1):97-129. |
| [24] | ZENG W, SAMARAS D, GU D, et al. Ricci Flow for 3D Shape Analysis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(4):662-677. |
| [1] | 王连东;杨东峰;崔亚平;陈国强. 预成形管坯压制成形汽车桥壳的变形分析[J]. 中国机械工程, 2013, 24(19): 2670-2674. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||