


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (5): 1160-1169.DOI: 10.3969/j.issn.1004-132X.2026.05.016
• 机械基础工程 • 上一篇
柯臻铮1,2( ), 吴剑波2, 张天宇1, 王恺2, 程亮1()
), 吴剑波2, 张天宇1, 王恺2, 程亮1()
收稿日期:2025-03-18
出版日期:2026-05-25
发布日期:2026-06-09
通讯作者:
程亮
作者简介:柯臻铮,男,1983 年生,工程师、博士研究生。研究方向为航空制造装备设计。 E-mail: kzzcaen@zju.edu.cn基金资助:
KE Zhenzheng1,2(), WU Jianbo2, ZHANG Tianyu1, WANG Kai2, CHENG Liang1()
Received:2025-03-18
Online:2026-05-25
Published:2026-06-09
Contact:
CHENG Liang
摘要:
自动化设备通常是一个强耦合、非线性且具备一定柔性的复杂机械系统,这使得建立该系统精确的运动学模型具有较大的难度。为此,针对一台大型龙门自动铺丝机提出一种综合几何偏差和重力变形的运动学建模方法。基于多体系统理论建立理论运动学模型,分析模型坐标转换中存在的几何偏差,研究龙门铺丝机重力变形敏感部位,通过力学抽象和参数提取得到重力变形矩阵,将几何偏差与重力变形有机引入理论运动学模型,建立龙门铺丝机综合运动学模型。利用目标函数建立、测量点选择、参数辨识等手段实现模型中的参数标定。实验结果表明,所提方法可有效提高龙门铺丝机运动学模型的精度,采用该方法后龙门铺丝机位置误差降低了74%以上。
中图分类号:
柯臻铮, 吴剑波, 张天宇, 王恺, 程亮. 大型龙门铺丝机综合运动学建模及参数标定[J]. 中国机械工程, 2026, 37(5): 1160-1169.
KE Zhenzheng, WU Jianbo, ZHANG Tianyu, WANG Kai, CHENG Liang. Integrated Kinematics Modeling and Parametric Calibration of Large Gantry Fiber Placement Machines[J]. China Mechanical Engineering, 2026, 37(5): 1160-1169.
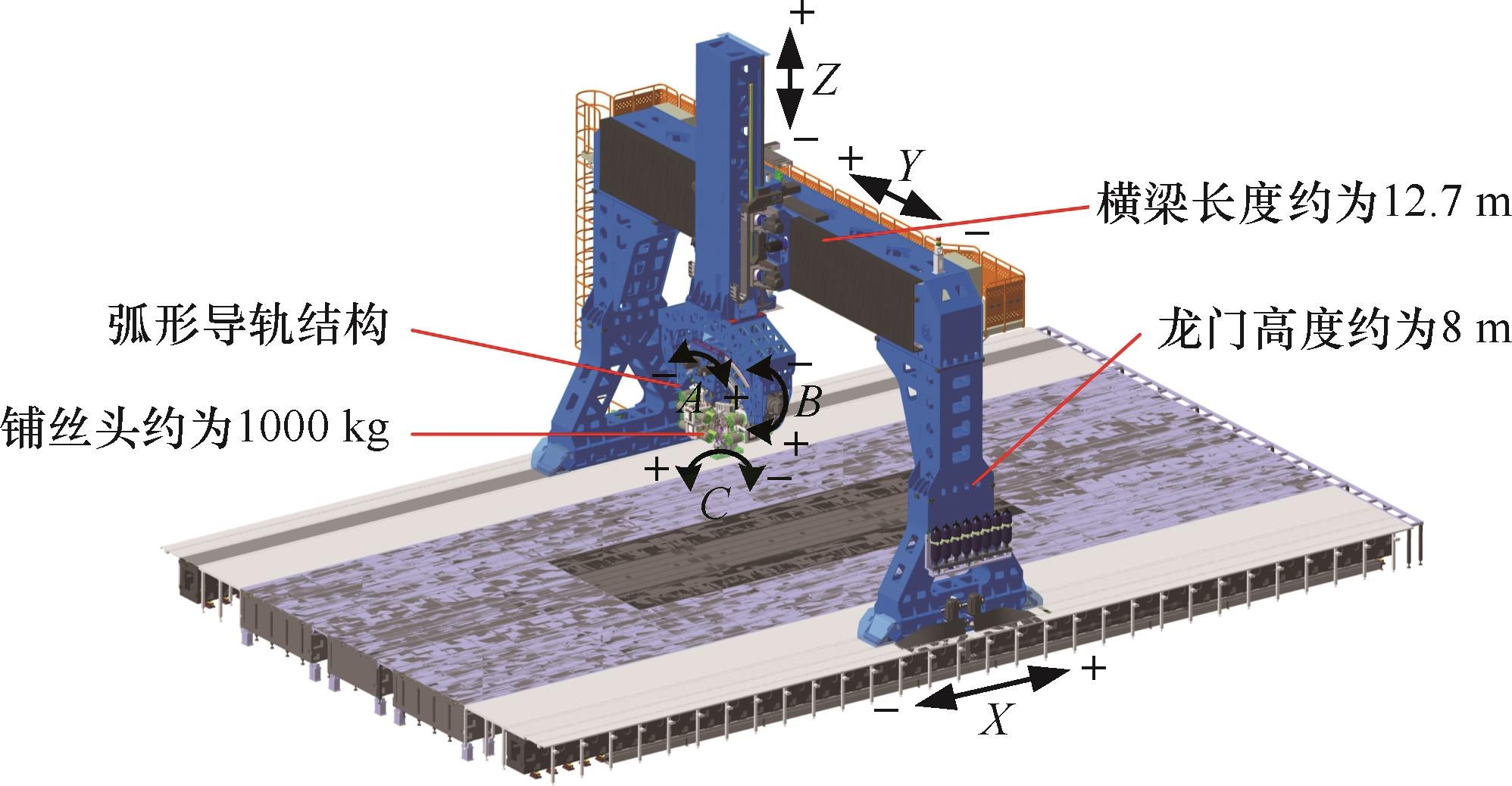
图1 龙门铺丝机结构
Fig.1 Gantry wire laying machine structure
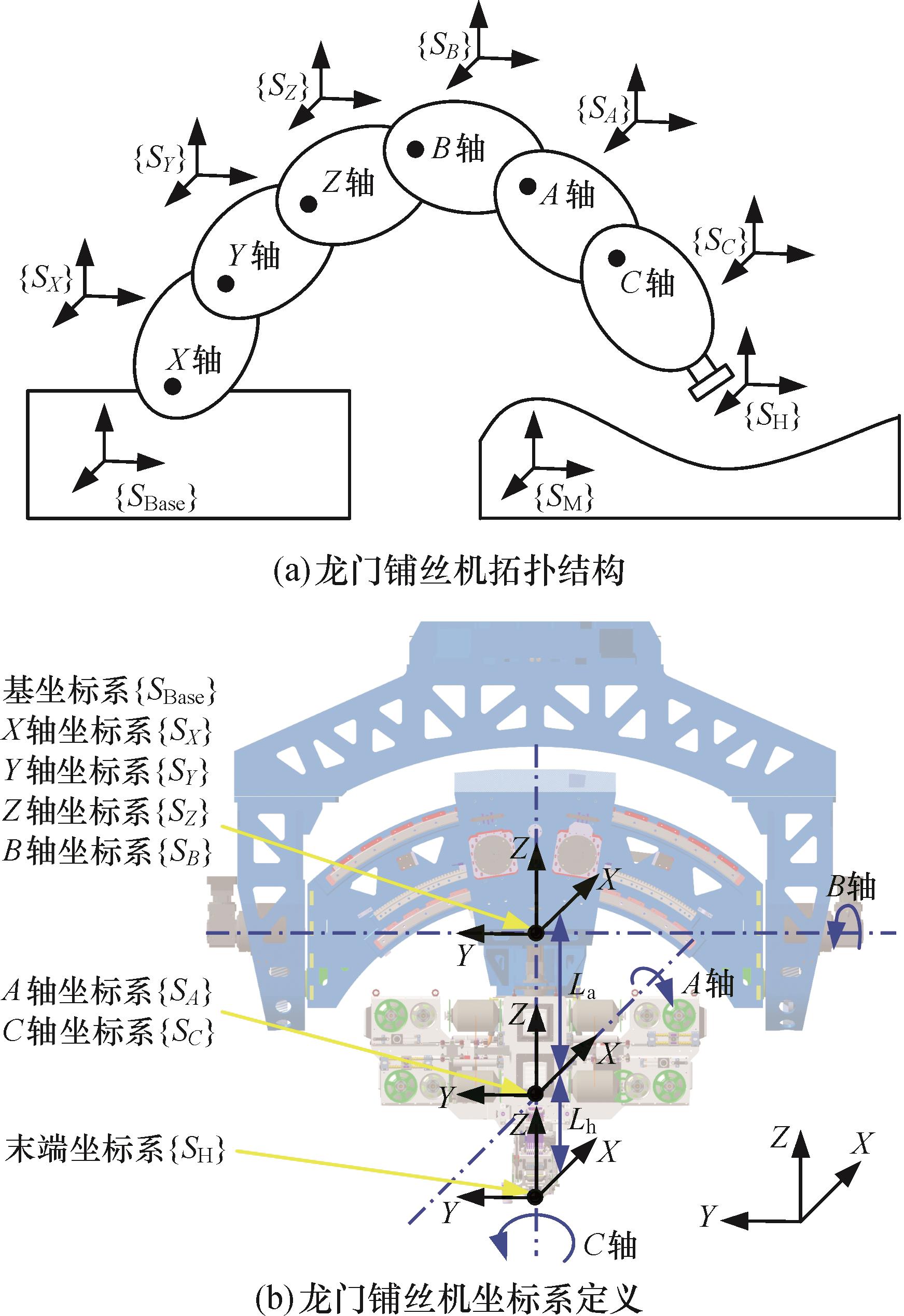
图2 龙门铺丝机拓扑结构及坐标系定义
Fig.2 Gantry wire laying machine topology and coordinate system definition
| 误差源 | 引入数目 | 对应齐次变换矩阵 | 参数初值 | |
|---|---|---|---|---|
| 基坐标系偏差 | 6 | |||
| 轴偏差 | {SAct}-{SX } | 0 | ||
| {SX }-{SY } | 2 | |||
| {SY }-{SZ } | 2 | |||
| {SZ }-{SB } | 2 | |||
| {SB }-{SA } | 3 | |||
| {SA }-{SC } | 4 | |||
| 末端偏差 | {SC }-{SH} | 3 | ||
表1 几何偏差引入的运动学参数
Tab.1 Kinematic parameters introduced by geometric deviations
| 误差源 | 引入数目 | 对应齐次变换矩阵 | 参数初值 | |
|---|---|---|---|---|
| 基坐标系偏差 | 6 | |||
| 轴偏差 | {SAct}-{SX } | 0 | ||
| {SX }-{SY } | 2 | |||
| {SY }-{SZ } | 2 | |||
| {SZ }-{SB } | 2 | |||
| {SB }-{SA } | 3 | |||
| {SA }-{SC } | 4 | |||
| 末端偏差 | {SC }-{SH} | 3 | ||
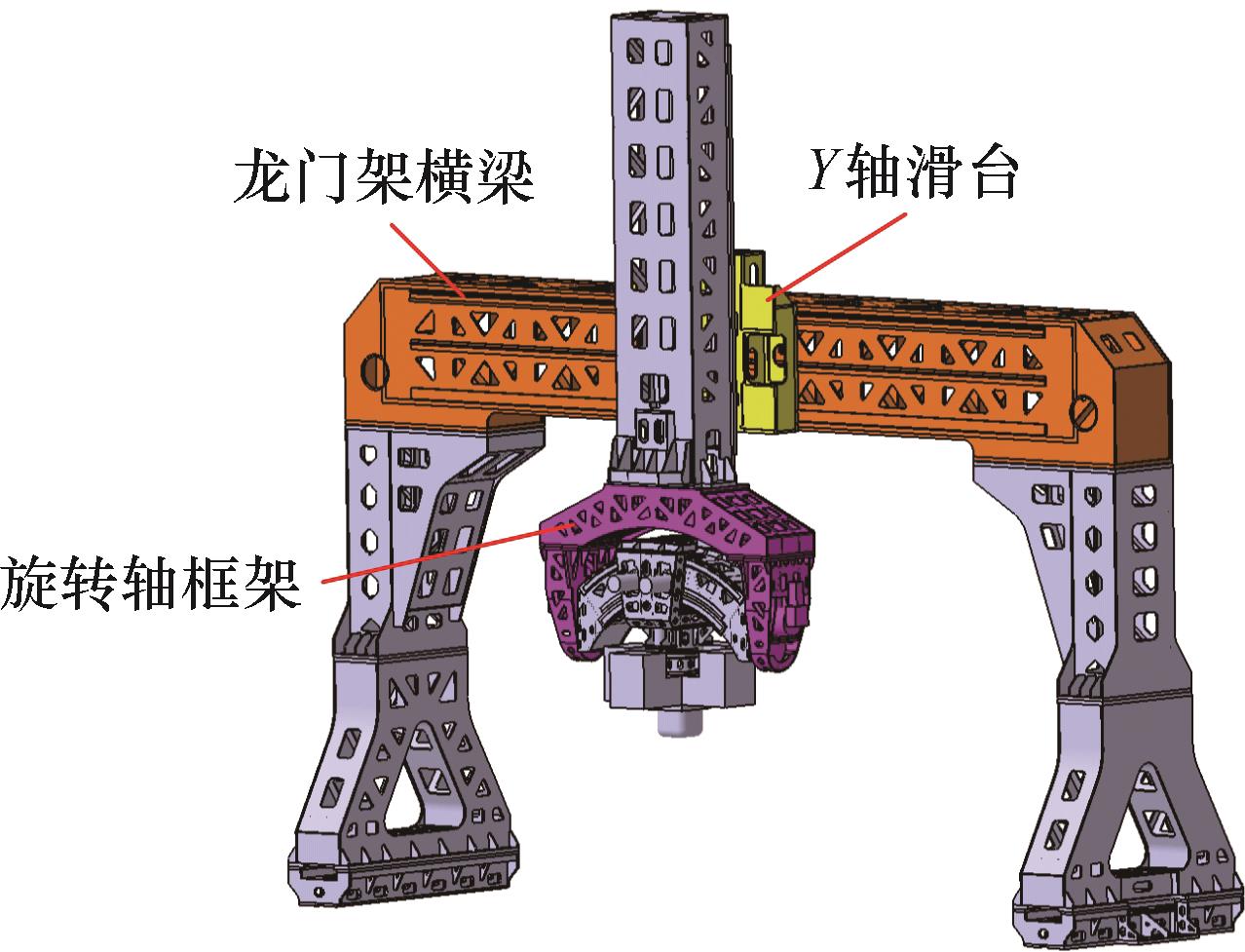
图3 龙门铺丝机易发生重力变形的结构分布
Fig.3 Structural distribution of gantry wire spreaders prone to gravitational deformation
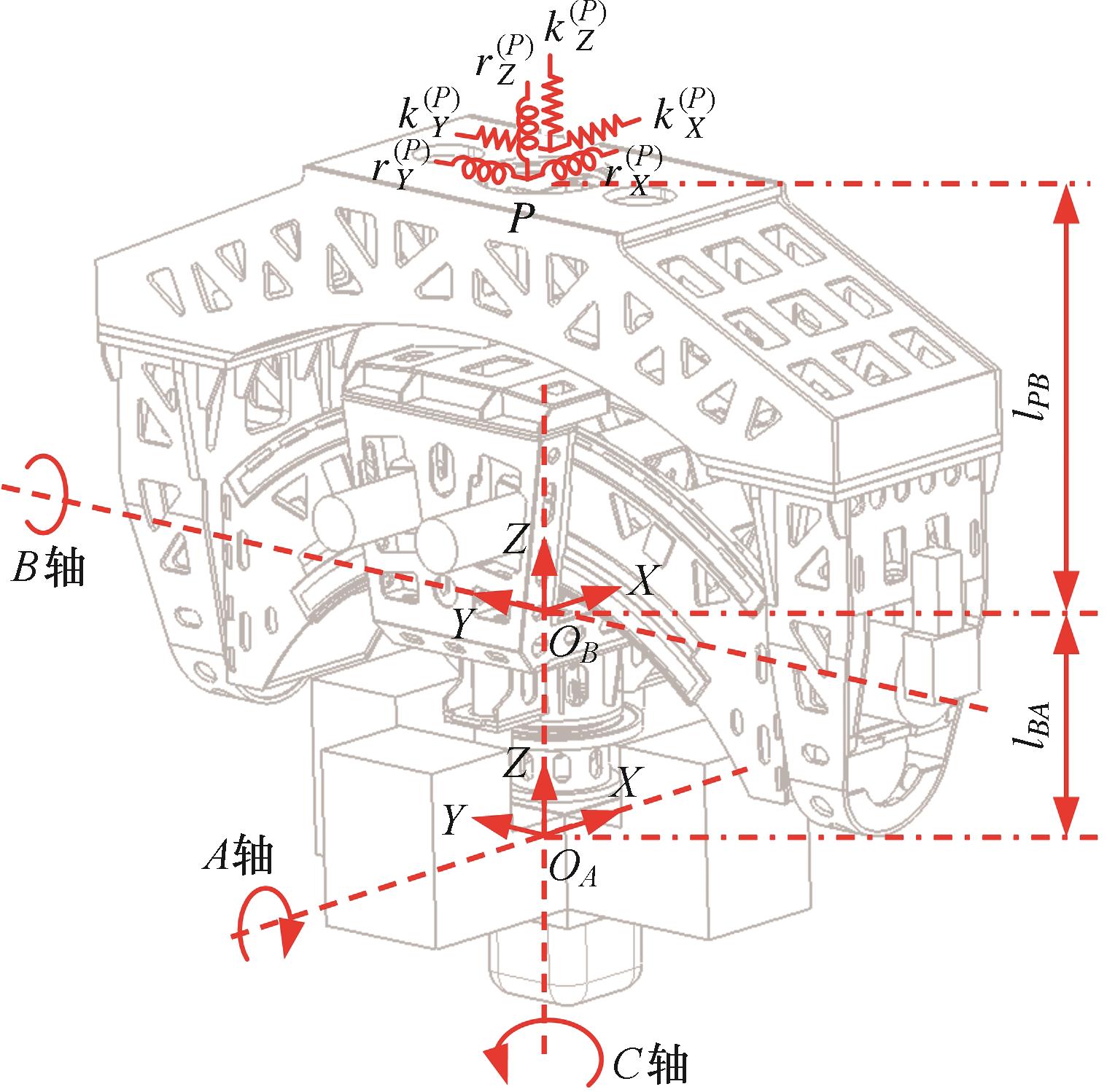
图4 旋转轴框架受力分析
Fig.4 Rotary axis frame force analysis
图5 Y轴滑台受力分析
Fig.5 Y-axis slide table force analysis
图6 横梁受力分析
Fig.6 Crossbeam force analysis
| 重力变形分量 | 参数数目 | 运动学参数 | 参数初值 |
|---|---|---|---|
| 4 | |||
| 4 | |||
| 0 | |||
| 6 | |||
| 2 | |||
| 2 |
表2 重力变形引入的运动学参数
Tab.2 Kinematic parameters introduced by gravitational deformation
| 重力变形分量 | 参数数目 | 运动学参数 | 参数初值 |
|---|---|---|---|
| 4 | |||
| 4 | |||
| 0 | |||
| 6 | |||
| 2 | |||
| 2 |
图7 测量工装示意图
Fig.7 Schematic diagram of measuring tooling
图8 实验平台及测量数据获取
Fig.8 Experimental platform and measurement data acquisition
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.55 | 0.71 | 0 | 0.03 | ||||
| 0.47 | 0.24 | 0 | 0 | ||||
| 0 | 0 | ||||||
| 0 | 0.01 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0 | 0 | 0 | ||||
| 0 | |||||||
| 0 | 0.18 | 0.37 | |||||
| 0 | 0 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0.01 |
表3 由几何误差引入的运动学参数辨识结果
Tab.3 Identification results of kinematic parameters introduced by geometric errors
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.55 | 0.71 | 0 | 0.03 | ||||
| 0.47 | 0.24 | 0 | 0 | ||||
| 0 | 0 | ||||||
| 0 | 0.01 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0 | 0 | 0 | ||||
| 0 | |||||||
| 0 | 0.18 | 0.37 | |||||
| 0 | 0 | ||||||
| 0 | 0 | 0 | 0 | ||||
| 0 | 0.01 |
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.01 | 1994.39 | ||||||
| 0 | 2.6×10 | ||||||
| 0 | 1.6×10 | ||||||
| 0 | |||||||
| 0 | |||||||
| 0 | |||||||
| 0.17 | 0 | ||||||
| 0 | 1.82 | ||||||
| 3400.97 |
表4 由重力变形引入的运动学参数辨识结果
Tab.4 Identification results of kinematic parameters introduced by gravitational deformation
| 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ | 参数 | 模型Ⅰ | 模型Ⅱ | 模型Ⅲ |
|---|---|---|---|---|---|---|---|
| 0.01 | 1994.39 | ||||||
| 0 | 2.6×10 | ||||||
| 0 | 1.6×10 | ||||||
| 0 | |||||||
| 0 | |||||||
| 0 | |||||||
| 0.17 | 0 | ||||||
| 0 | 1.82 | ||||||
| 3400.97 |
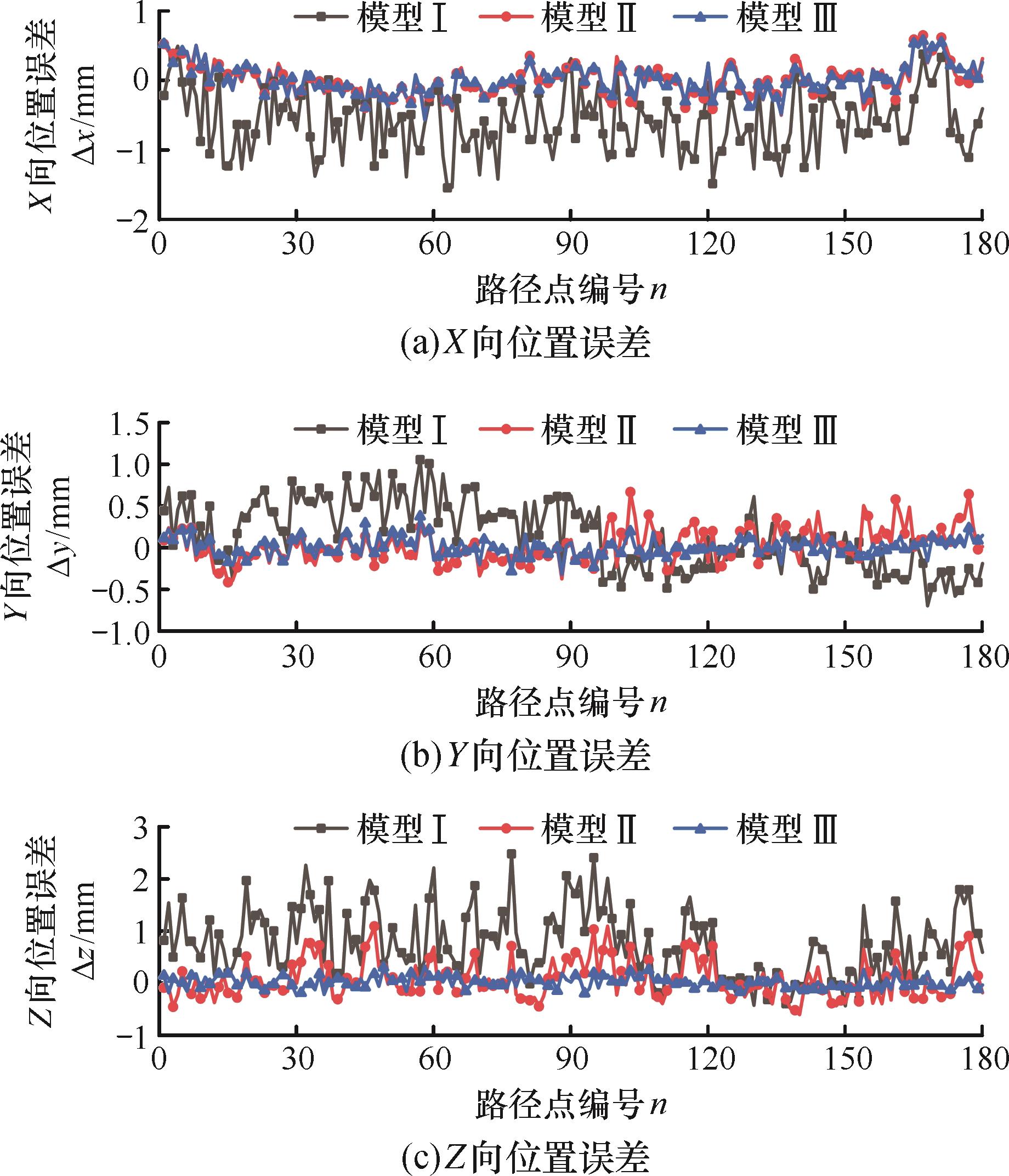
图9 残余误差比较
Fig.9 Comparison of residual errors
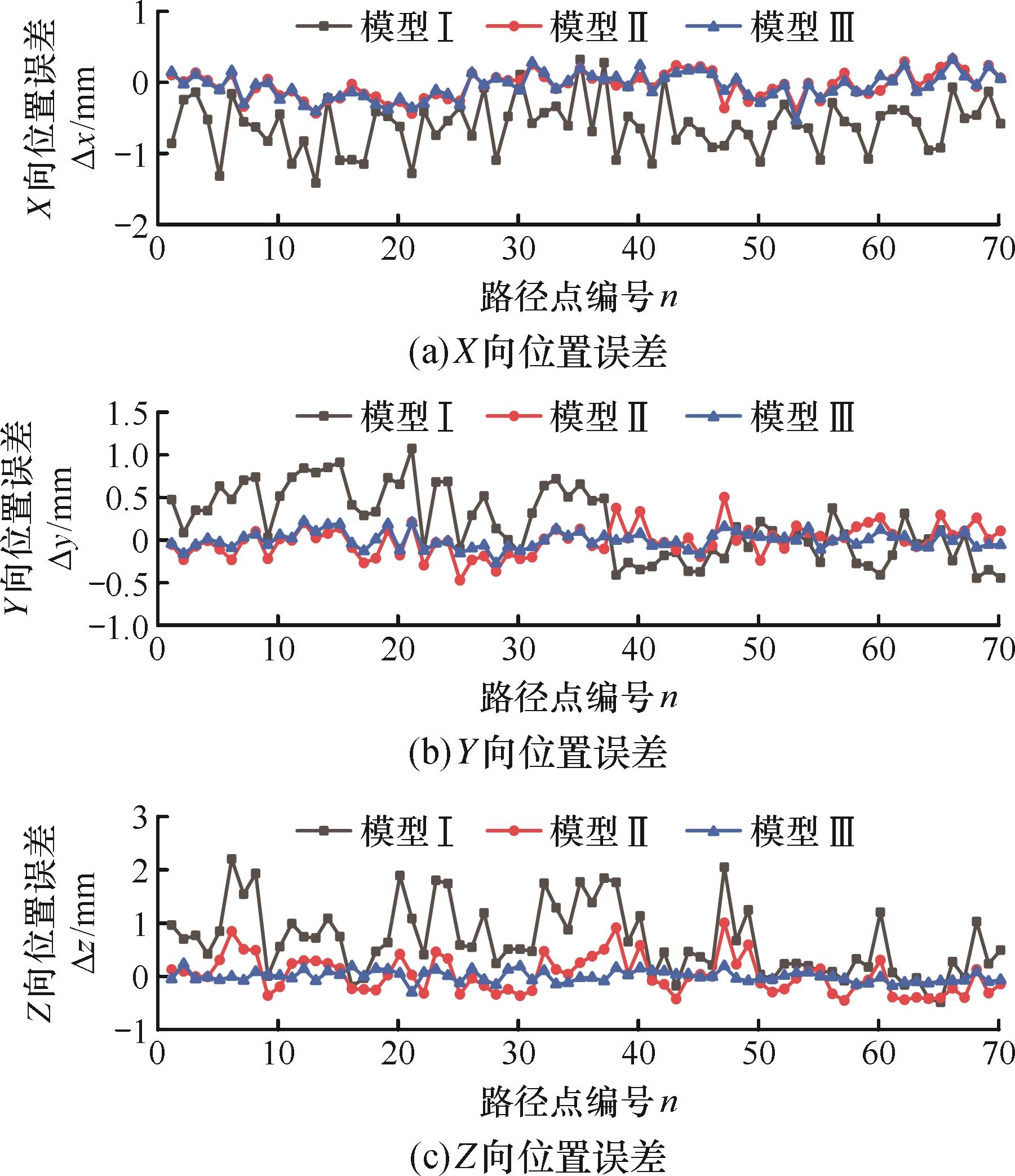
图10 预测误差比较
Fig.10 Comparison of prediction errors
| 参数 | 残余误差 | 预测误差 | |||||
|---|---|---|---|---|---|---|---|
| 平均值 | 模型Ⅰ/mm | 0.641 | 0.362 | 0.802 | 0.633 | 0.368 | 0.724 |
| 模型Ⅱ/mm | 0.179 | 0.156 | 0.283 | 0.153 | 0.135 | 0.280 | |
| 减小比例/% | 72.1 | 56.9 | 64.7 | 75.8 | 63.3 | 61.3 | |
| 模型Ⅲ/mm | 0.167 | 0.081 | 0.092 | 0.153 | 0.079 | 0.086 | |
| 减小比例/% | 74.0 | 77.5 | 88.6 | 75.8 | 78.6 | 88.1 | |
| 最大值 | 模型Ⅰ/mm | 1.54 | 1.05 | 2.48 | 1.42 | 1.07 | 2.20 |
| 模型Ⅱ/mm | 0.649 | 0.667 | 1.09 | 0.44 | 0.503 | 1.00 | |
| 减小比例/% | 57.9 | 36.5 | 56.0 | 69.0 | 53.0 | 54.5 | |
| 模型Ⅲ/mm | 0.569 | 0.375 | 0.332 | 0.538 | 0.275 | 0.300 | |
| 减小比例/% | 63.1 | 64.2 | 86.6 | 62.1 | 74.3 | 86.4 | |
表5 误差数据统计分析表
Tab.5 Statistical analysis table of error data
| 参数 | 残余误差 | 预测误差 | |||||
|---|---|---|---|---|---|---|---|
| 平均值 | 模型Ⅰ/mm | 0.641 | 0.362 | 0.802 | 0.633 | 0.368 | 0.724 |
| 模型Ⅱ/mm | 0.179 | 0.156 | 0.283 | 0.153 | 0.135 | 0.280 | |
| 减小比例/% | 72.1 | 56.9 | 64.7 | 75.8 | 63.3 | 61.3 | |
| 模型Ⅲ/mm | 0.167 | 0.081 | 0.092 | 0.153 | 0.079 | 0.086 | |
| 减小比例/% | 74.0 | 77.5 | 88.6 | 75.8 | 78.6 | 88.1 | |
| 最大值 | 模型Ⅰ/mm | 1.54 | 1.05 | 2.48 | 1.42 | 1.07 | 2.20 |
| 模型Ⅱ/mm | 0.649 | 0.667 | 1.09 | 0.44 | 0.503 | 1.00 | |
| 减小比例/% | 57.9 | 36.5 | 56.0 | 69.0 | 53.0 | 54.5 | |
| 模型Ⅲ/mm | 0.569 | 0.375 | 0.332 | 0.538 | 0.275 | 0.300 | |
| 减小比例/% | 63.1 | 64.2 | 86.6 | 62.1 | 74.3 | 86.4 | |
| [1] | 黄亿洲, 王志瑾, 刘格菲. 碳纤维增强复合材料在航空航天领域的应用[J]. 西安航空学院学报, 2021, 39(5): 44-51. |
| HUANG Yizhou, WANG Zhijin, LIU Gefei. Application of Carbon Fiber Reinforced Composite in Aerospace[J]. Journal of Xi'an Aeronautical University, 2021, 39(5): 44-51. | |
| [2] | 郝元恺, 肖加余. 高性能复合材料学[M]. 北京: 化学工业出版社, 2004. |
| HAO Yuankai, XIAO Jiayu. High Performance Composite Materials Science[M]. Beijing: Chemical Industry Press, 2004. | |
| [3] | 张晓虎, 孟宇, 张炜. 碳纤维增强复合材料技术发展现状及趋势[J]. 纤维复合材料, 2004, 21(1): 50-53. |
| ZHANG Xiaohu, MENG Yu, ZHANG Wei. The State of the Art and Trend of Carbon Fiber Reinforced Composites[J]. Fiber Composites, 2004, 21(1): 50-53. | |
| [4] | 王显峰, 严飙, 薛柯, 等. 机器人高效自动铺丝技术研究进展[J]. 航空制造技术, 2019, 59(16): 14-20. |
| WANG Xianfeng, YAN Biao, XUE Ke, et al. Research Progress of Robot Automatic Placement Technology with High Efficiency[J]. Aeronautical Manufacturing Technology, 2019, 59(16): 14-20. | |
| [5] | ZHAO Dan, BI Yunbo, KE Yinglin. An Efficient Error Compensation Method for Coordinated CNC Five-axis Machine Tools[J]. International Journal of Machine Tools and Manufacture, 2017, 123: 105-115. |
| [6] | ZHANG Zhao, JIANG Feng, LUO Ming, et al. Geometric Error Measuring, Modeling, and Compensation for CNC Machine Tools: a Review[J]. Chinese Journal of Aeronautics, 2024, 37(2): 163-198. |
| [7] | 谢核. 机器人加工几何误差建模及工程应用[D]. 武汉: 华中科技大学, 2019. |
| XIE He. Geometric Error Modeling and Its Engineering Application in Robotic Machining[D]. Wuhan: Huazhong University of Science and Technology, 2019. | |
| [8] | 董泽园, 李杰, 刘辛军, 等. 数控机床两种几何误差建模方法有效性试验研究[J]. 机械工程学报, 2019, 55(5): 137-147. |
| DONG Zeyuan, LI Jie, LIU Xinjun, et al. Experimental Study on the Effectiveness of Two Different Geometric Error Modeling Methods for Machine Tools[J]. Journal of Mechanical Engineering, 2019, 55(5): 137-147. | |
| [9] | 郭世杰, 梅雪松, 姜歌东. 基于平面光栅的机床几何误差测量与辨识[J]. 计算机集成制造系统, 2020, 26(8): 2037-2049. |
| GUO Shijie, MEI Xuesong, JIANG Gedong. Geometric Error Measurement and Identification of Machine Tool Based on Gross Grid Encoder[J]. Computer Integrated Manufacturing Systems, 2020, 26(8): 2037-2049. | |
| [10] | ZHU Shaowei, DING Guofu, QIN Shengfeng, et al. Integrated Geometric Error Modeling, Identification and Compensation of CNC Machine Tools[J]. International Journal of Machine Tools and Manufacture, 2012, 52(1): 24-29. |
| [11] | 杨建军, 司林林, 林守金, 等. 齿轮加工机床几何误差补偿研究综述[J]. 机床与液压, 2024, 52(19): 174-187. |
| YANG Jianjun, SI Linlin, LIN Shoujin, et al. Review on Geometric Error Compensation of Gear Processing Machine Tools[J].Machine Tool & Hydraulics,2024,52(19): 174-187. | |
| [12] | 范晋伟, 秦池, 潘日. 基于数控指令修正的数控内圆磨床几何误差补偿[J]. 机床与液压, 2022, 50(21): 157-162. |
| FAN Jinwei, QIN Chi, PAN Ri. Geometric Error Compensation of CNC Internal Grinder Machine Based on CNC Command Correction[J]. Machine Tool & Hydraulics, 2022, 50(21): 157-162. | |
| [13] | 李忠群, 刘鸿, 刘强, 等. 四轴联动机床几何误差建模分析与评估[J]. 机床与液压, 2024, 52(23): 175-180. |
| LI Zhongqun, LIU Hong, LIU Qiang, et al. Analysis and Evaluation of Geometric Error Modeling for Four-axis Linkage Machine Tools[J]. Machine Tool & Hydraulics, 2024, 52(23): 175-180. | |
| [14] | 王明海, 张威, 刘香辰. 基于位姿变化的钻铆机器人刚度优化[J]. 机床与液压, 2024, 52(3): 49-54. |
| WANG Minghai, ZHANG Wei, LIU Xiangchen. Drilling Riveting Robot Stiffness Optimization Based on Pose Change[J]. Machine Tool & Hydraulics, 2024, 52(3): 49-54. | |
| [15] | 陆历历, 郭旭红, 吉文正. TH6920滑枕挠曲变形的耦合补偿[J]. 机械设计与制造, 2019(1): 261-263. |
| LU Lili, GUO Xuhong, JI Wenzheng. Coupling Compensation of the Ram Flexure Deformation for TH6920[J]. Machinery Design & Manufacture, 2019(1): 261-263. | |
| [16] | ZHU Weidong, MEI Biao, KE Yinglin. Kinematic Modeling and Parameter Identification of a New Circumferential Drilling Machine for Aircraft Assembly[J]. The International Journal of Advanced Manufacturing Technology, 2014, 72(5): 1143-1158. |
| [17] | ZHAO Dan, BI Yunbo, KE Yinglin. Kinematic Modeling and Base Frame Calibration of a Dual-machine-based Drilling and Riveting System for Aircraft Panel Assembly[J]. The International Journal of Advanced Manufacturing Technology, 2018, 94(5): 1873-1884. |
| [1] | 杨明星, 沈佳乐, 高鹏, 张兴, 王俊翔. 连续体机器人设计与导向路径损失补偿策略[J]. 中国机械工程, 2025, 36(12): 2820-2828. |
| [2] | 高贯斌1, 2, 赵思郭1, 2, 李映杰1, 2. 基于关节扭矩平衡的机器人末端负载建模及辨识[J]. 中国机械工程, 2025, 36(06): 1188-1197. |
| [3] | 刘毅, 易旺民, 姚建涛, 王兴达, 余鹏, 赵永生. 狭长空间内重载调姿装配机器人的设计与研究[J]. 中国机械工程, 2024, 35(02): 324-336. |
| [4] | 夏军勇, 刘科进, 钟飞, 孙颖. 运用改进的教学模拟退火算法辨识关节臂式三坐标测量机的结构参数[J]. 中国机械工程, 2023, 34(03): 314-323. |
| [5] | 高文斌, 黄琪, 余晓流, . 模块化机器人几何误差分析及参数辨识研究[J]. 中国机械工程, 2022, 33(07): 811-817,851. |
| [6] | 李法民, 郑天江, 沈雯钧, 王会肖, 方灶军, 梁冬泰. 绳驱动连续体机器人标定方法[J]. 中国机械工程, 2022, 33(02): 202-208. |
| [7] | 谢胜龙1;李铁风2;王斌锐1;陈迪剑1. 基于KP模型的气动肌肉迟滞建模方法[J]. 中国机械工程, 2020, 31(10): 1183-1189. |
| [8] | 靳龙;陈岳坪;葛动元. 自由曲面几何偏差的空间统计分析[J]. 中国机械工程, 2020, 31(04): 445-450. |
| [9] | 李永泉1,2;吴鹏涛1,2;张阳1,2;张立杰2,3. 球面二自由度冗余驱动并联机器人系统动力学参数辨识及控制[J]. 中国机械工程, 2019, 30(16): 1967-1975. |
| [10] | 韦为1,2;耿葵花1,2;耿爱农3;王少伟1;李辛沫3. 基于LuGre模型的转子压缩机滑片-滑槽运动副摩擦力测试[J]. 中国机械工程, 2019, 30(08): 932-938. |
| [11] | 钱承;胡红生. 基于最小二乘支持向量机的压电作动器迟滞非线性建模及参数辨识[J]. 中国机械工程, 2018, 29(07): 835-841. |
| [12] | 李松1,2;杨诗怡1,2;张峰峰1,2;孙立宁1,2. 基于遗传算法与最小最大优化方法的六自由度放疗床参数辨识方法[J]. 中国机械工程, 2018, 29(01): 57-62. |
| [13] | 严浩1;白瑞林1;吉峰2. 一种改进的SCARA机器人动力学参数辨识方法[J]. 中国机械工程, 2017, 28(22): 2707-2713. |
| [14] | 陈东宁, 刘一丹, 姚成玉, 蒋栋林, 王可勋, . 基于修正黏性摩擦LuGre模型的比例多路阀摩擦补偿[J]. 中国机械工程, 2017, 28(01): 62-68. |
| [15] | 郭菲, 李永泉, 李玉昆, 张宇, 张立杰, . 电液驱动3-UPS/S并联稳定平台的动力学参数辨识[J]. 中国机械工程, 2016, 27(21): 2862-2868,2876. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||