


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (11): 2774-2782.DOI: 10.3969/j.issn.1004-132X.2025.11.036
• 工程前沿 • 上一篇
林歆悠( ), 金忠伟, 唐云亮
), 金忠伟, 唐云亮
收稿日期:2024-11-25
出版日期:2025-11-25
发布日期:2025-12-09
通讯作者:
林歆悠
作者简介:林歆悠*(通信作者),男,1981年生,教授、博士研究生导师。研究方向为新能源汽车电驱动控制策略、智能驾驶轨迹追踪与转向决策控制、融合燃料电池衰退和动态特性的能量管理策略。E-mail:linxinyoou@fzu.edu.cn。
基金资助:
Xinyou LIN(), Zhongwei JIN, Yunliang TANG
Received:2024-11-25
Online:2025-11-25
Published:2025-12-09
Contact:
Xinyou LIN
摘要:
针对自动驾驶汽车在道路大曲率弯道下跟踪精度不高的问题,聚焦于道路曲率对横向控制策略的影响,分别从车辆模型建模、横摆稳定性和时域优化三个角度对基于传统模型预测控制(MPC)算法的横向控制策略进行了改进优化。将道路曲率融入车辆模型,建立了曲率前馈的误差动力学模型,并以此为基础设计了基于曲率前馈MPC算法的横向控制策略。然后在策略中添加了一个由横向车速和稳态横摆角速度组成的横摆稳定性约束来提高车辆在大曲率工况时的横摆稳定性。基于遗传算法建立了车速、道路曲率和时域三者之间的MAP图,以优化策略的预测时域和控制时域。进行了仿真分析,结果表明改进后的横向控制策略能够有效提高车辆的路径跟踪精度和横摆稳定性。最后,实车道路试验验证了曲率前馈MPC策略的有效性。
中图分类号:
林歆悠, 金忠伟, 唐云亮. 融合道路曲率前馈的车辆横向控制策略[J]. 中国机械工程, 2025, 36(11): 2774-2782.
Xinyou LIN, Zhongwei JIN, Yunliang TANG. Vehicle Lateral Control Strategy Integrating Road Curvature Feedforward[J]. China Mechanical Engineering, 2025, 36(11): 2774-2782.
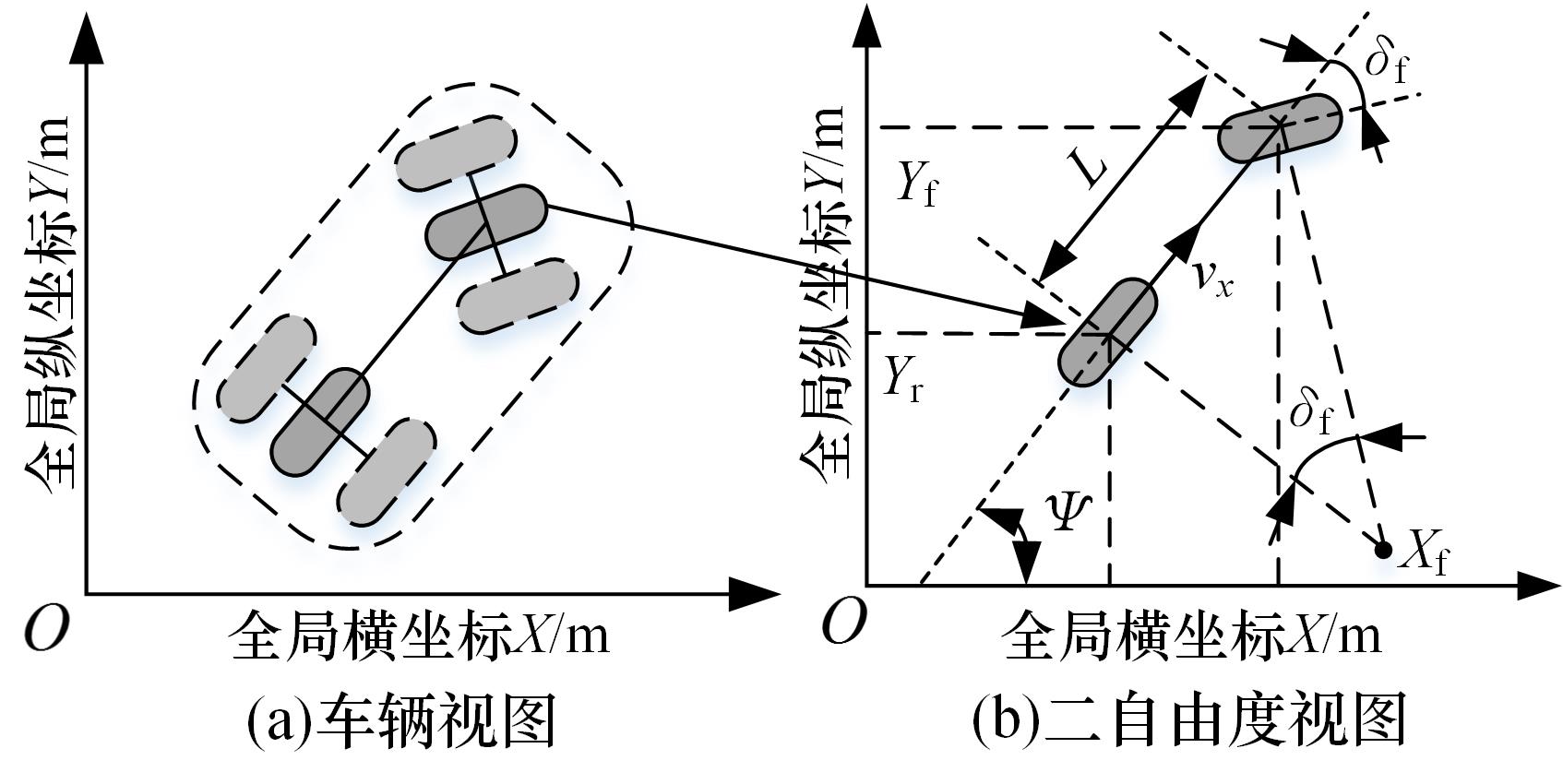
图1 单轨运动学模型
Fig.1 Monorail kinematic model
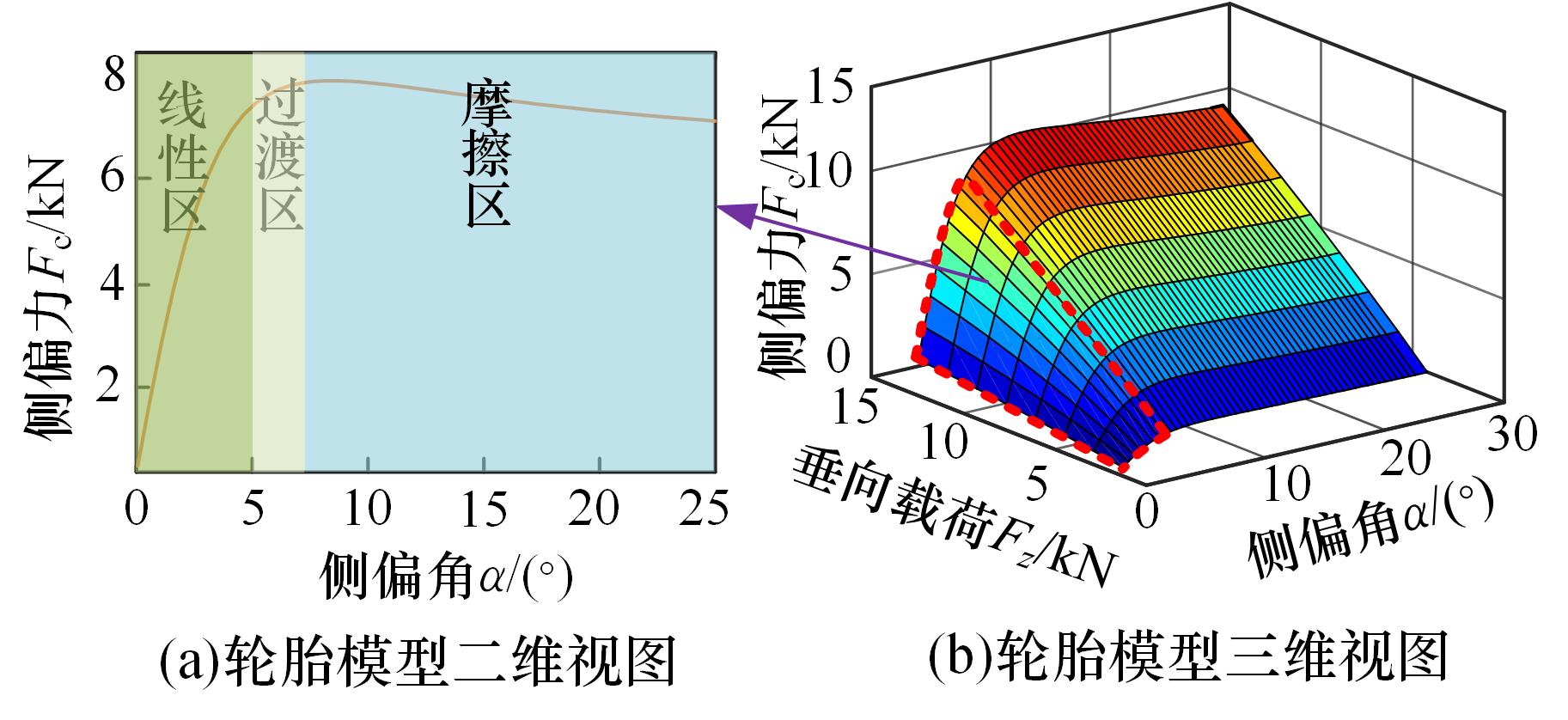
图2 Pacejka轮胎模型
Fig.2 Pacejka tire model
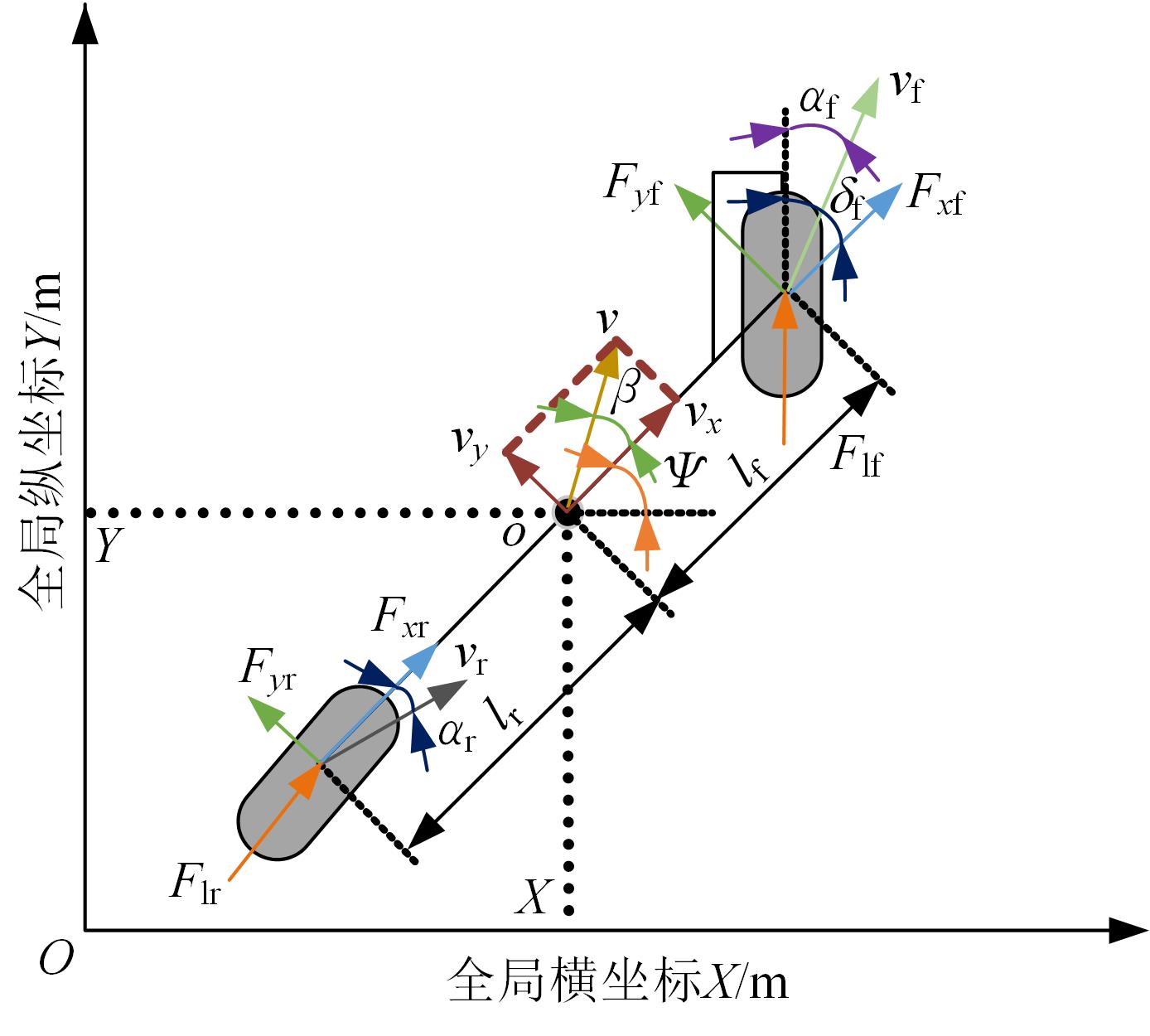
图3 单轨动力学模型
Fig.3 Monorail dynamic model
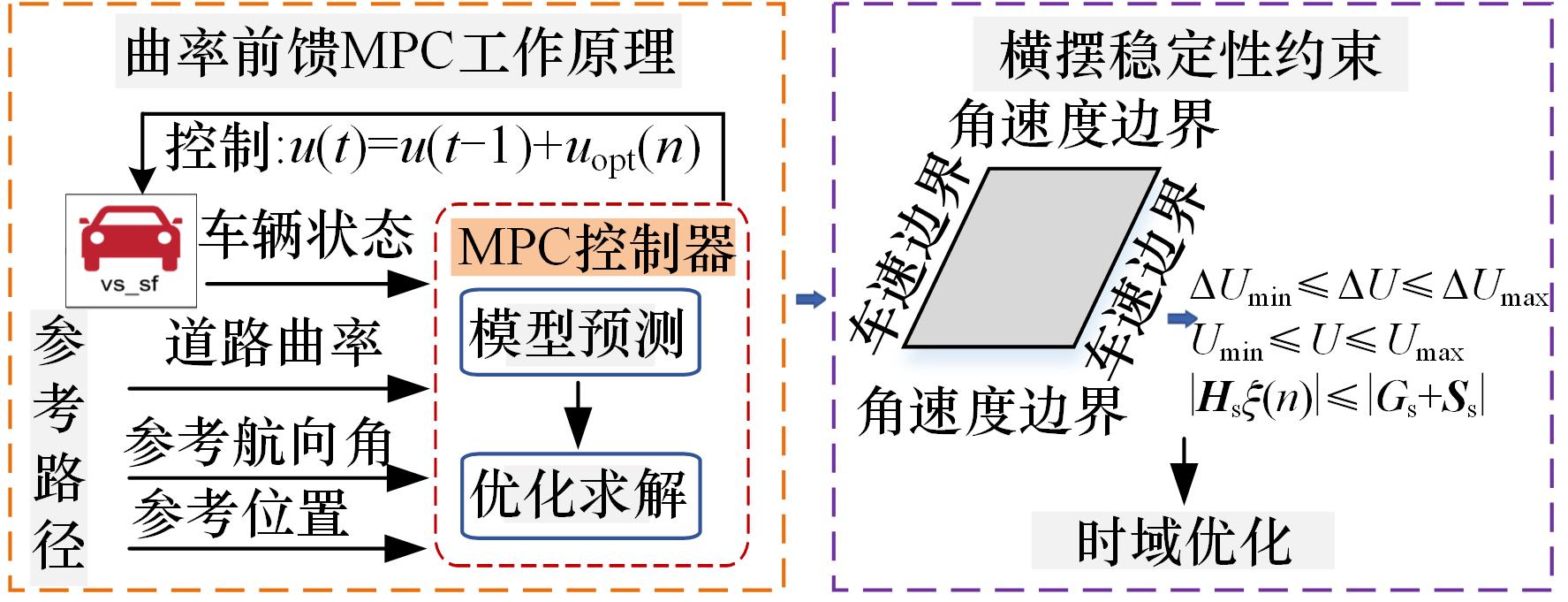
图4 融合曲率前馈MPC控制策略设计流程图
Fig.4 Design flowchart of fusion curvature feedforward MPC control strategy
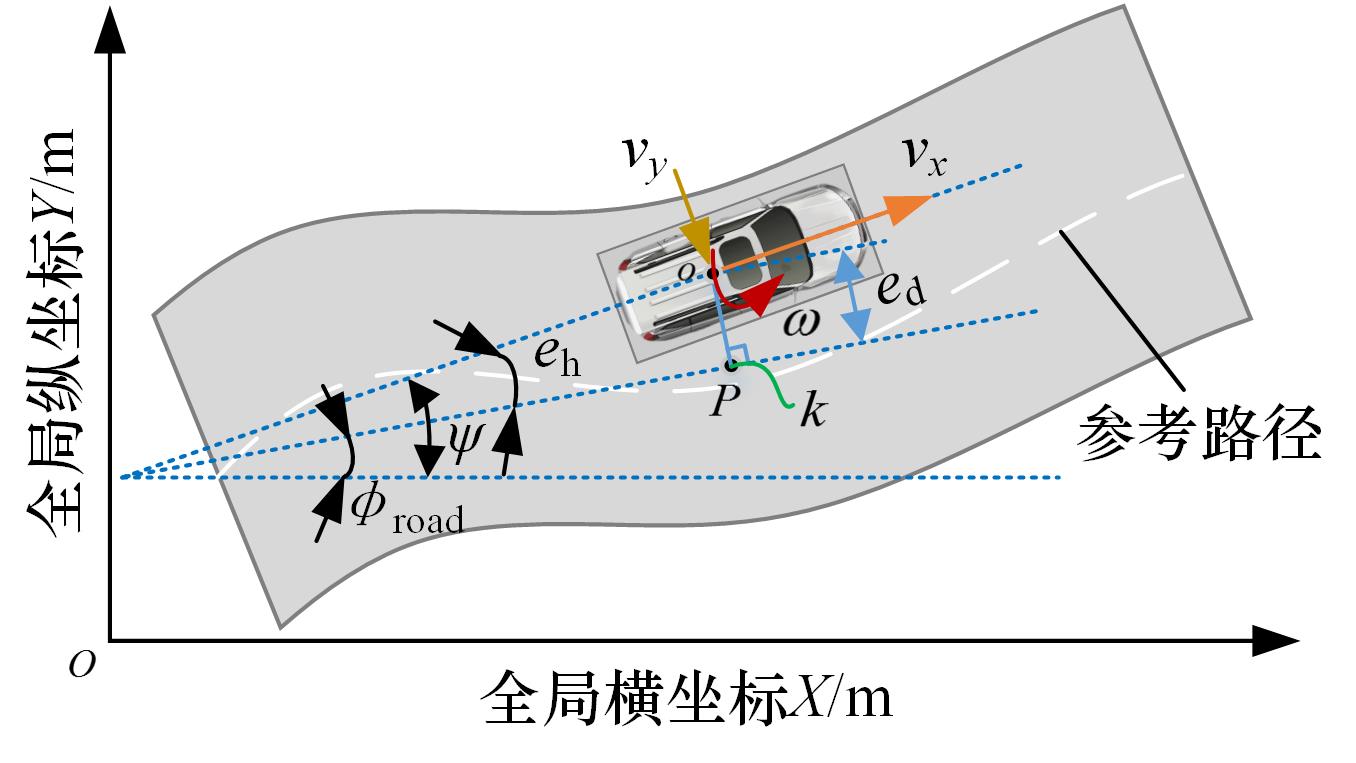
图5 考虑道路曲率的跟踪误差示意图
Fig.5 Schematic diagram of tracking error considering road curvature
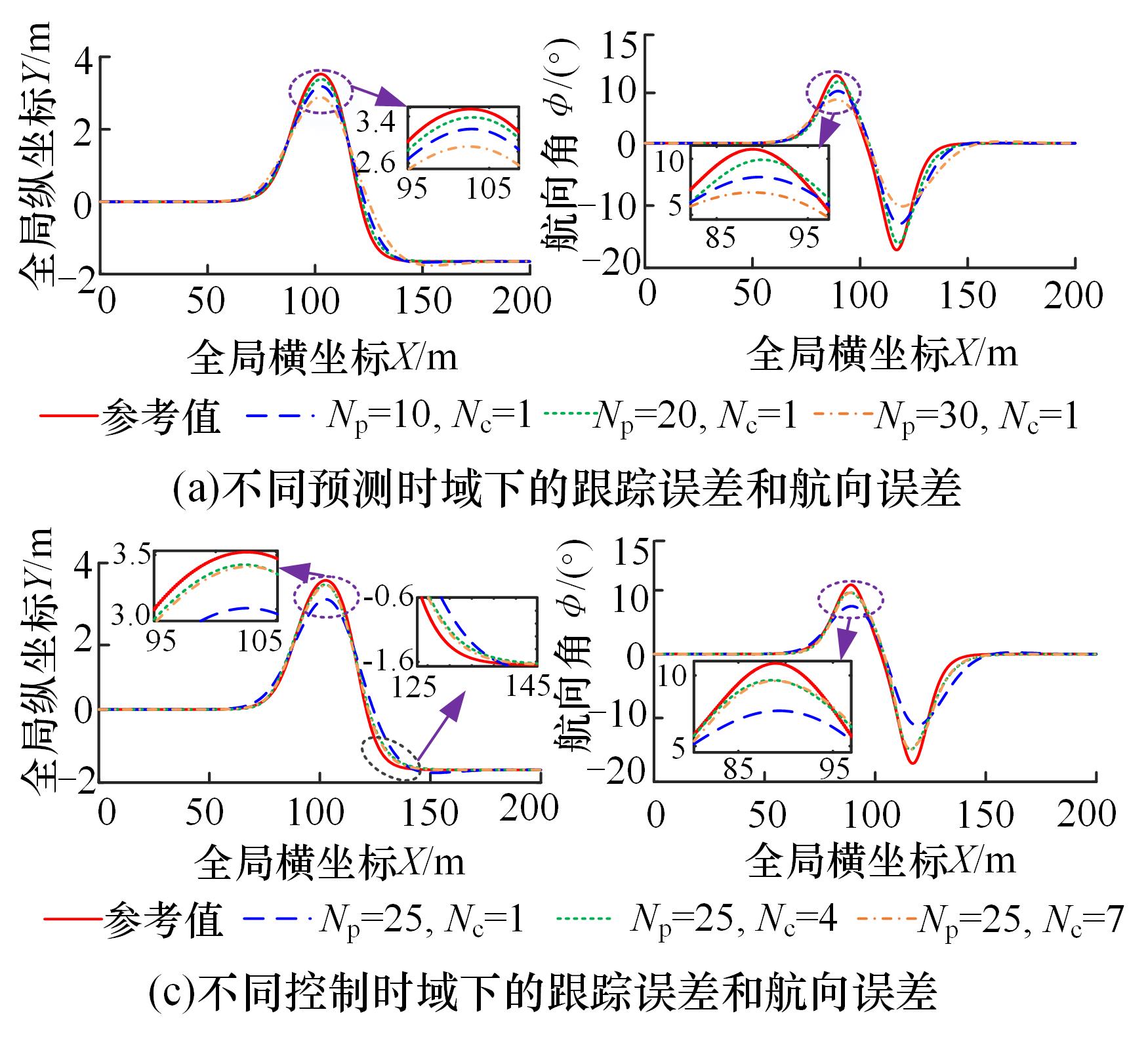
图6 60km/h时不同时域下的双移线跟踪结果
Fig.6 Double line tracking results in different time domains at 60km/h

图7 车速-曲率半径-预测时域拟合图
Fig.7 Fitting diagram of vehicle speed-curvature radius-prediction time domain
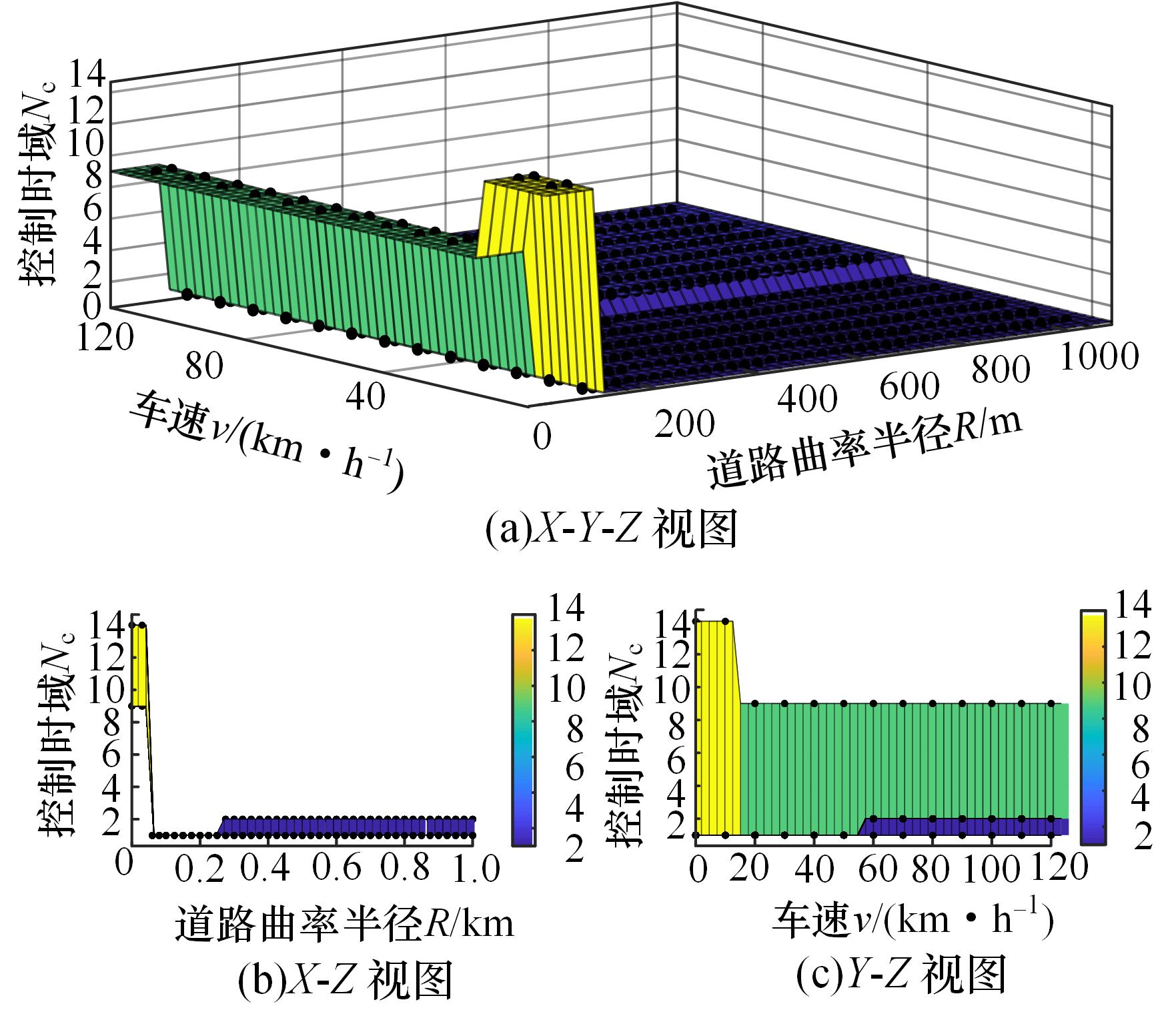
图8 车速-曲率半径-控制时域拟合图
Fig.8 Fitting diagram of vehicle speed-curvature radius-control time domain
| 参数名称 | 取值 |
|---|---|
| 车辆质量m/kg | 1530 |
| 车辆前后轴到质心的距离 | 1.05,1.55 |
| 转动惯量 | 2059.2 |
| 采样时间/s | 0.05 |
| 权重矩阵 Q | |
| 权重矩阵 R | [ |
| 转角增量限制/(°) | 0.86 |
| 转角限制/(°) | 25 |
表1 控制策略的通用参数
Tab.1 General parameters of control strategy
| 参数名称 | 取值 |
|---|---|
| 车辆质量m/kg | 1530 |
| 车辆前后轴到质心的距离 | 1.05,1.55 |
| 转动惯量 | 2059.2 |
| 采样时间/s | 0.05 |
| 权重矩阵 Q | |
| 权重矩阵 R | [ |
| 转角增量限制/(°) | 0.86 |
| 转角限制/(°) | 25 |
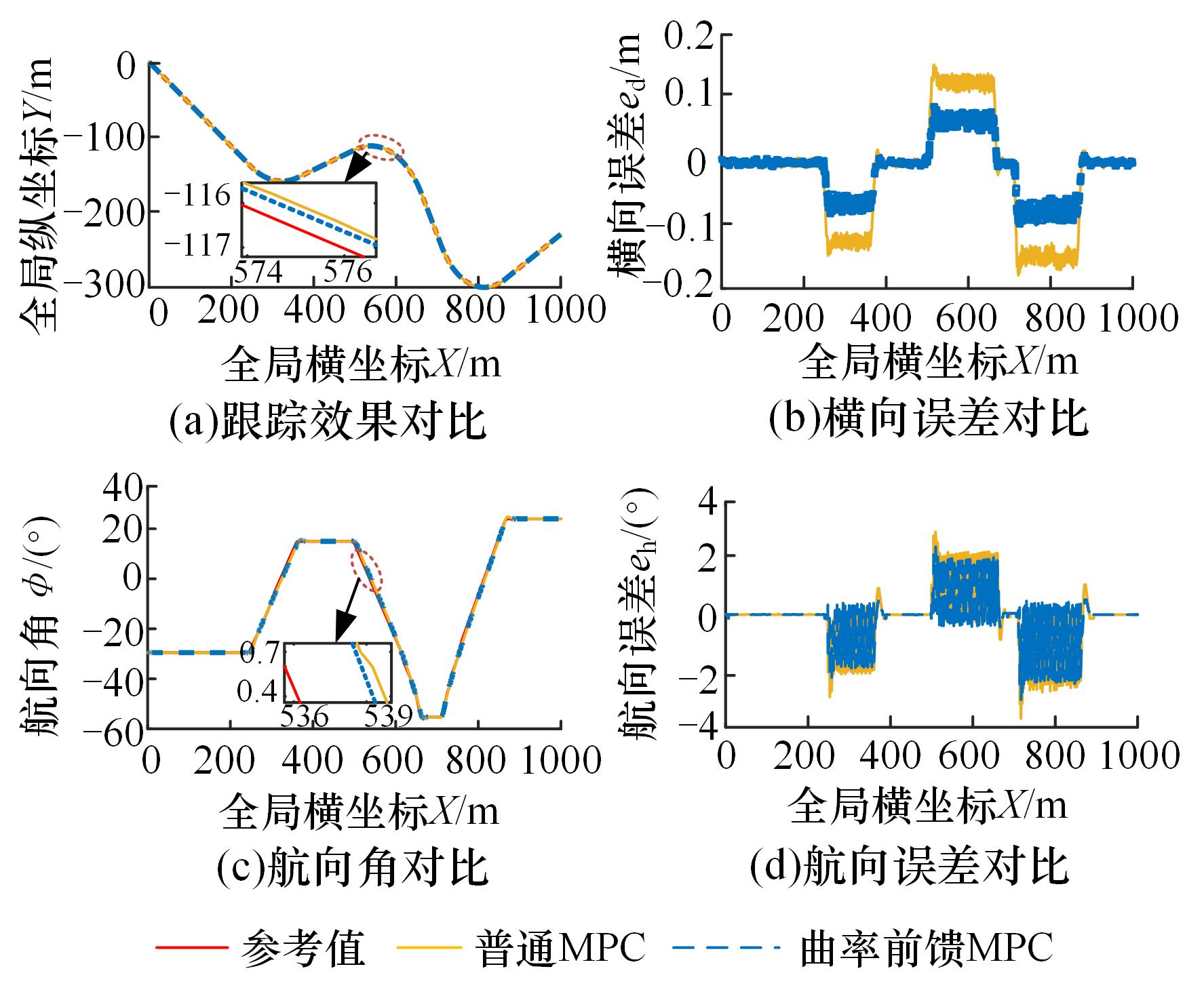
图9 36 km/h时的路径跟踪效果对比
Fig.9 Comparison of path tracking effects at 36 km/h
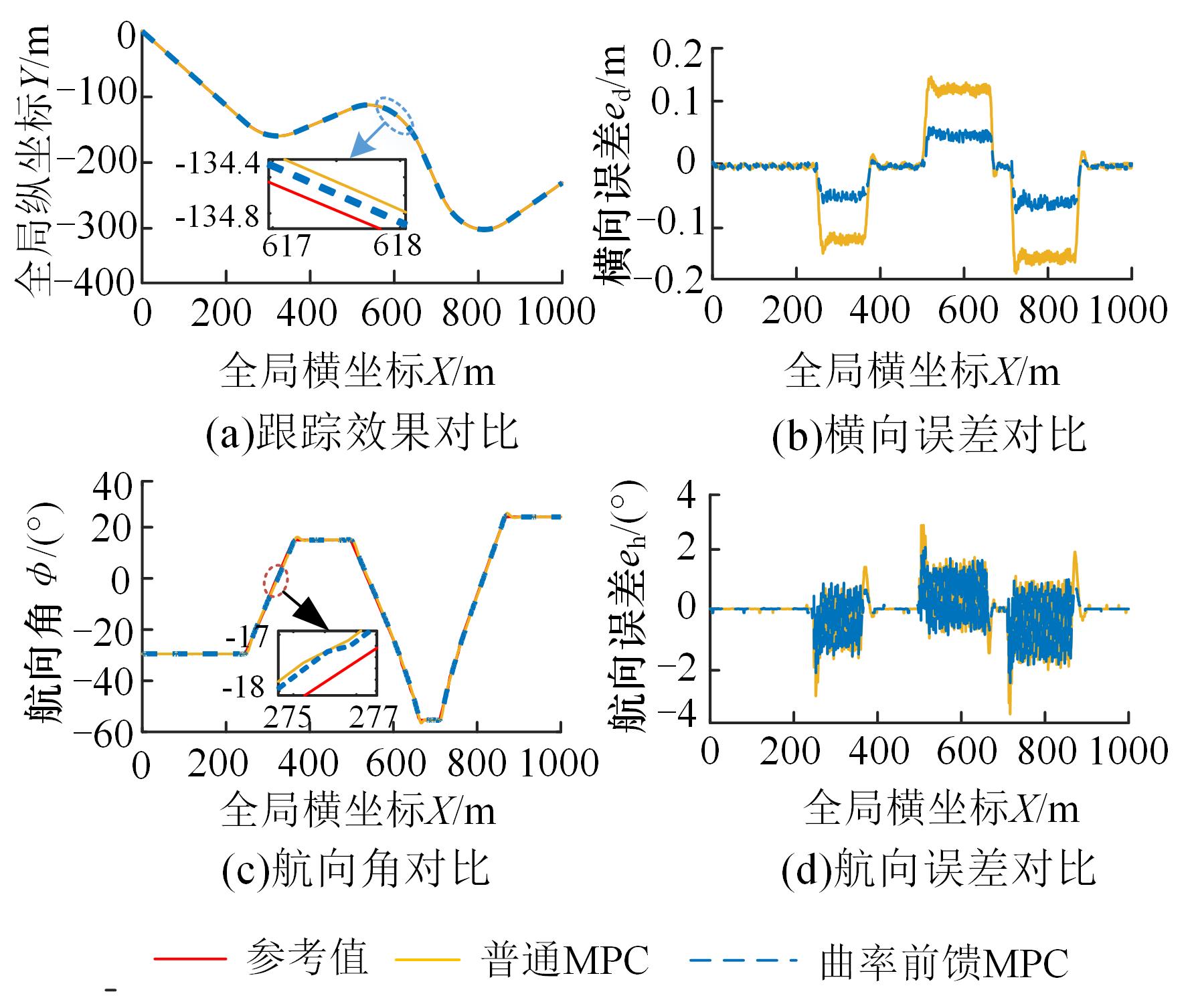
图10 54 km/h时的路径跟踪效果对比
Fig.10 Comparison of path tracking effects at 54 km/h
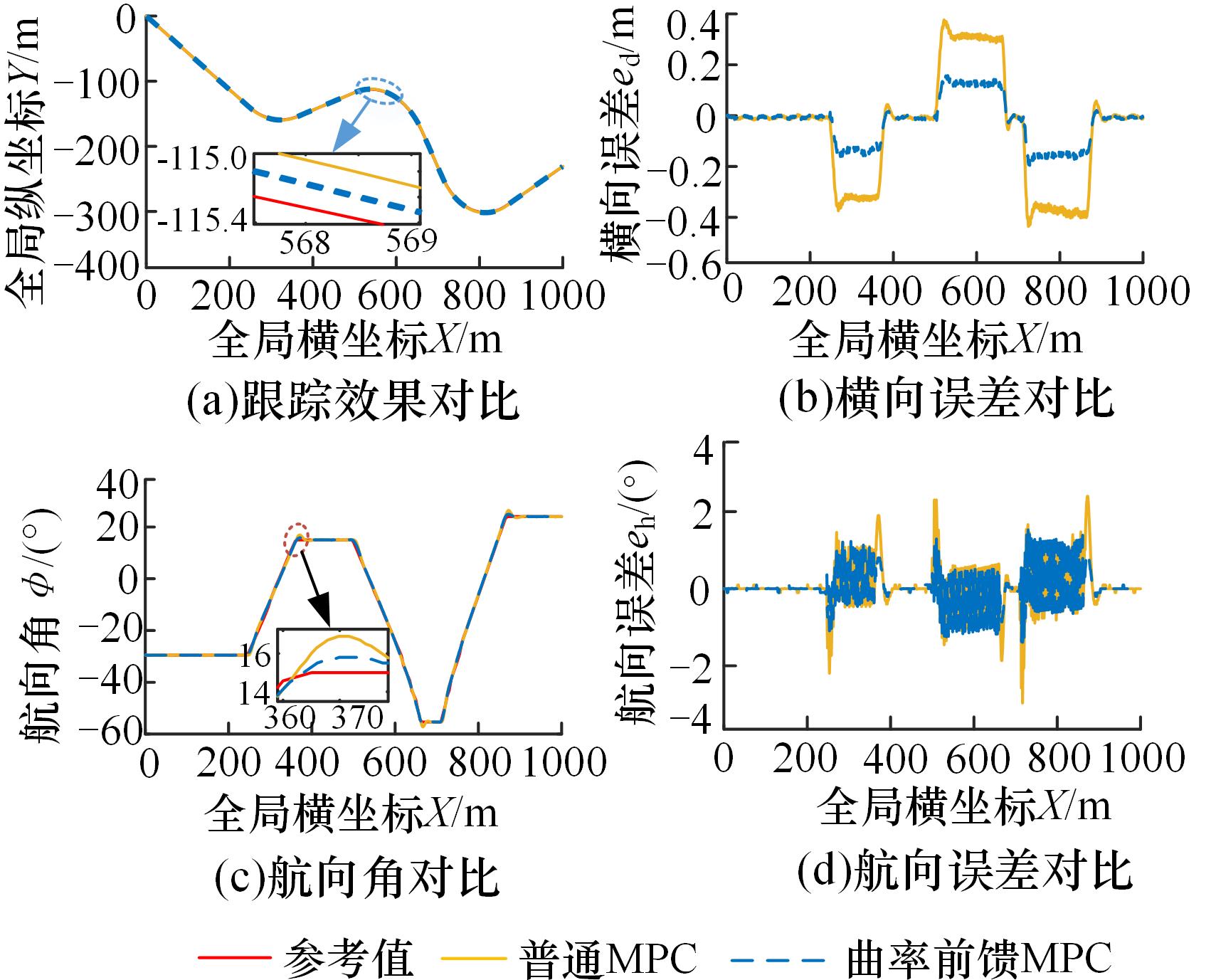
图11 72 km/h时的路径跟踪效果对比
Fig.11 Comparison of path tracking effects at 72 km/h
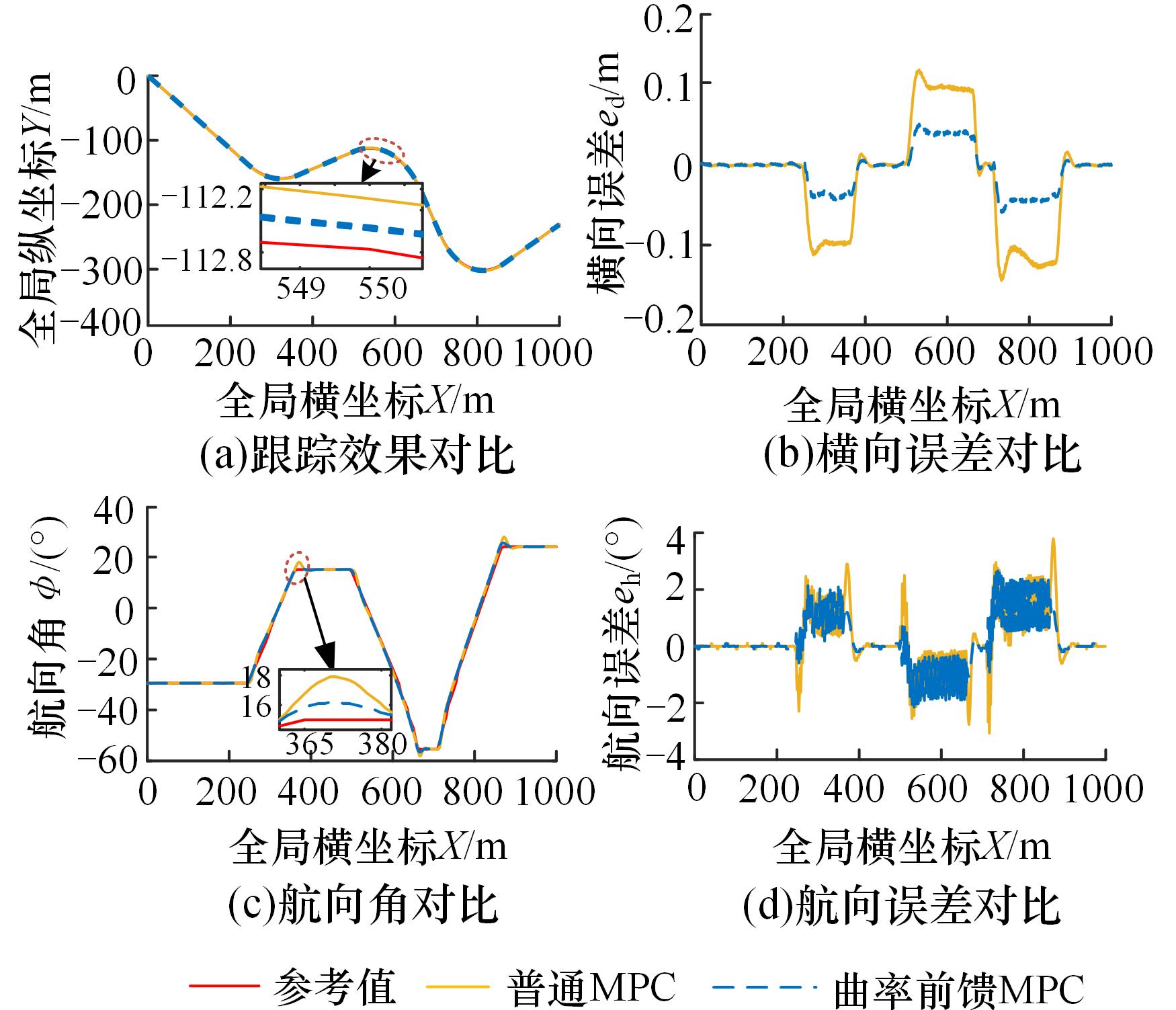
图12 90 km/h时的路径跟踪效果对比
Fig.12 Comparison of path tracking effects at 90 km/h
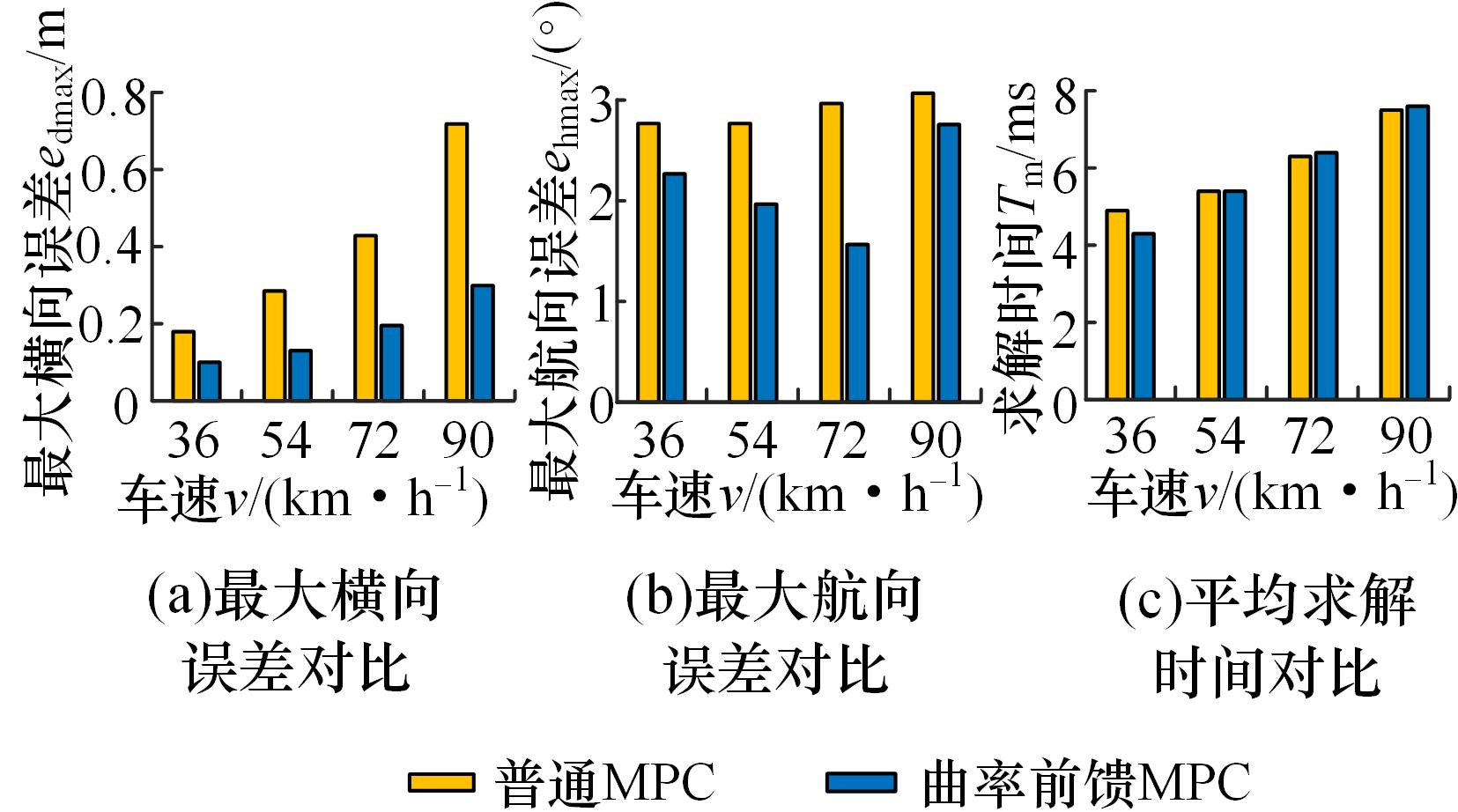
图13 道路曲率对横向控制策略的影响对比
Fig.13 Comparison of the influence of road curvature on lateral control strategies
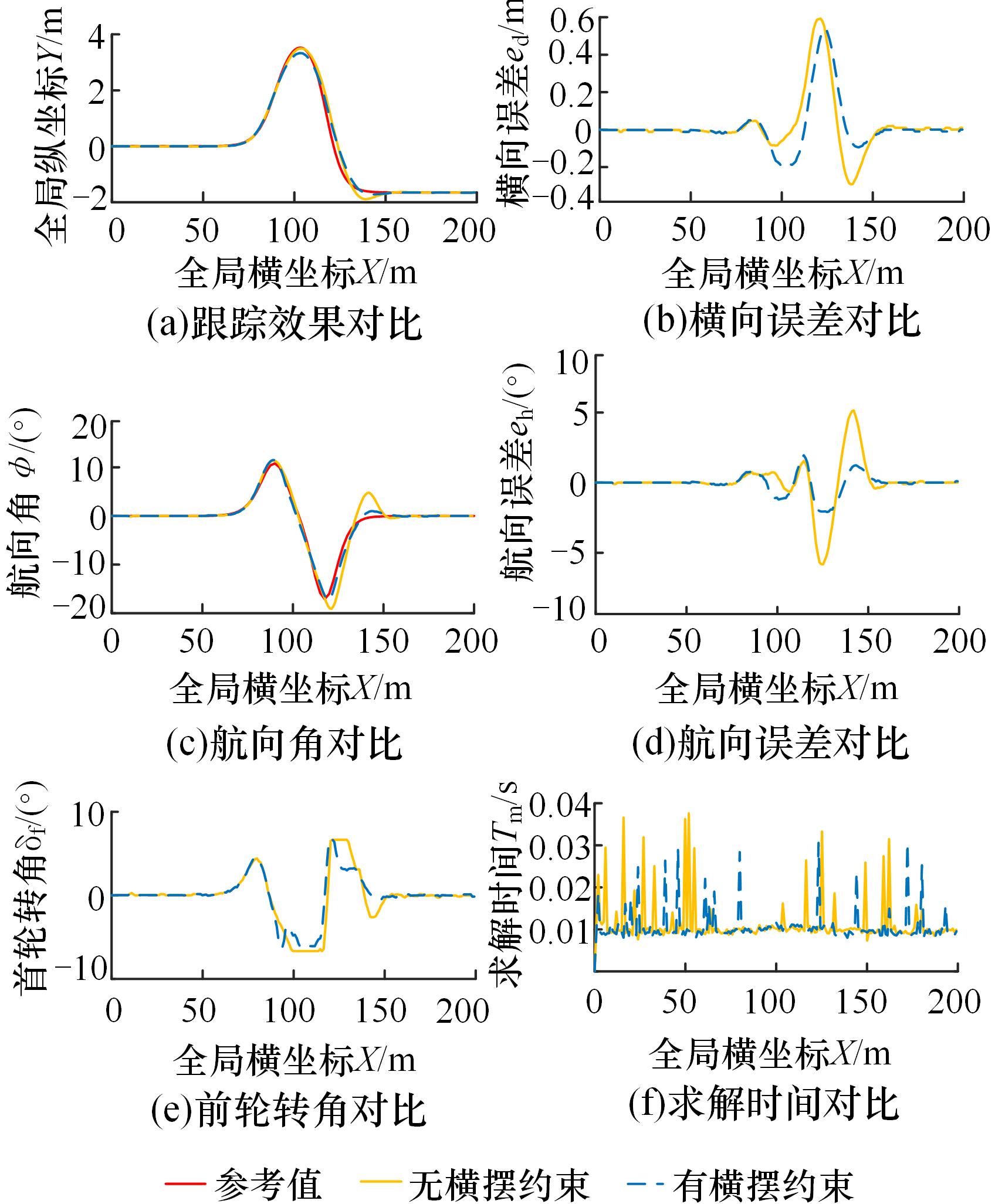
图14 72 km/h时不同控制策略的性能对比
Fig.14 Performance comparison of different control strategies at 72 km/h
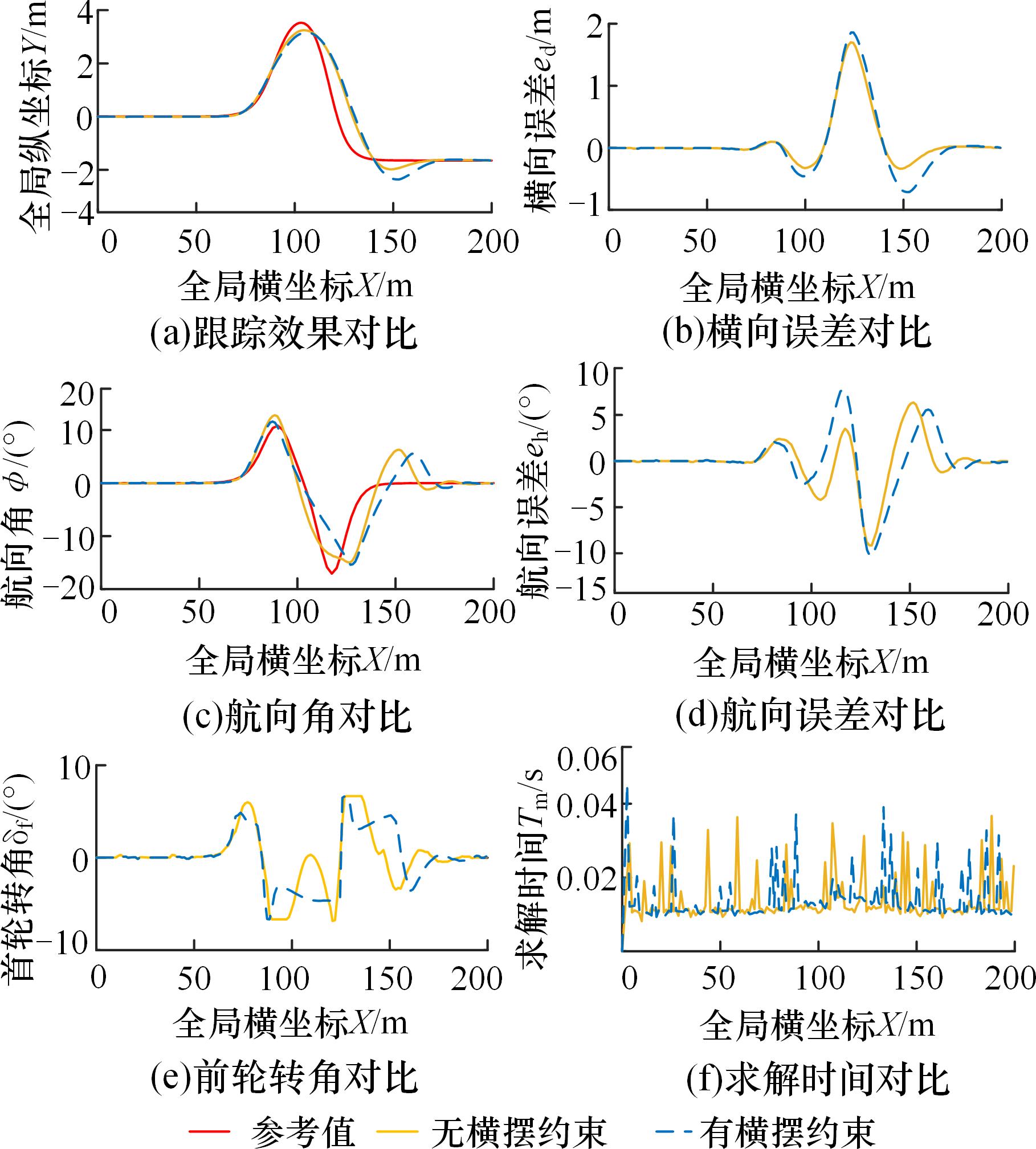
图15 90 km/h时不同控制策略的性能对比
Fig.15 Performance comparison of different control strategies at 90 km/h
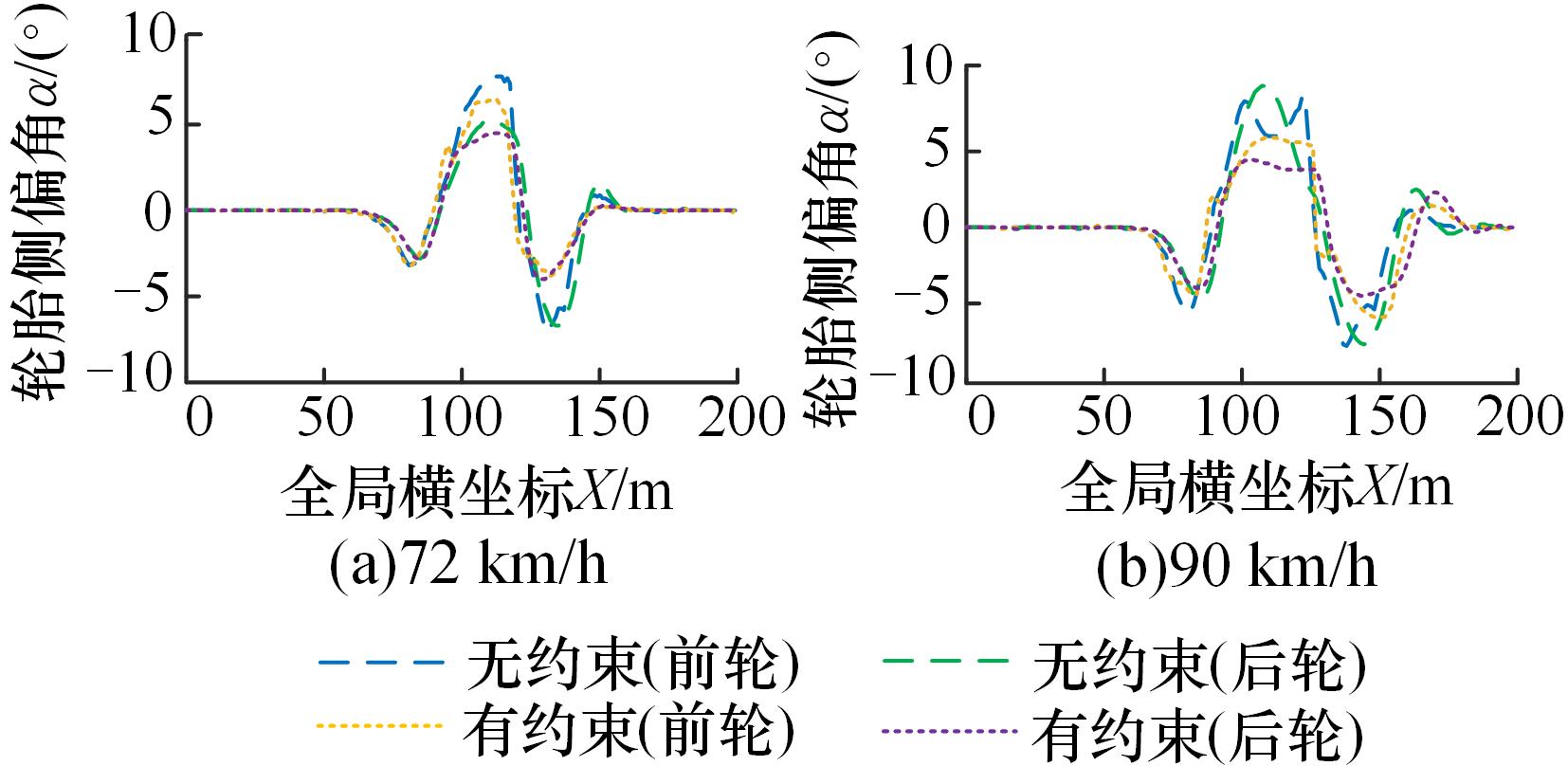
图16 横摆稳定性约束对轮胎侧偏角的影响
Fig.16 Influence of lateral stability constraints on tire sideslip angle
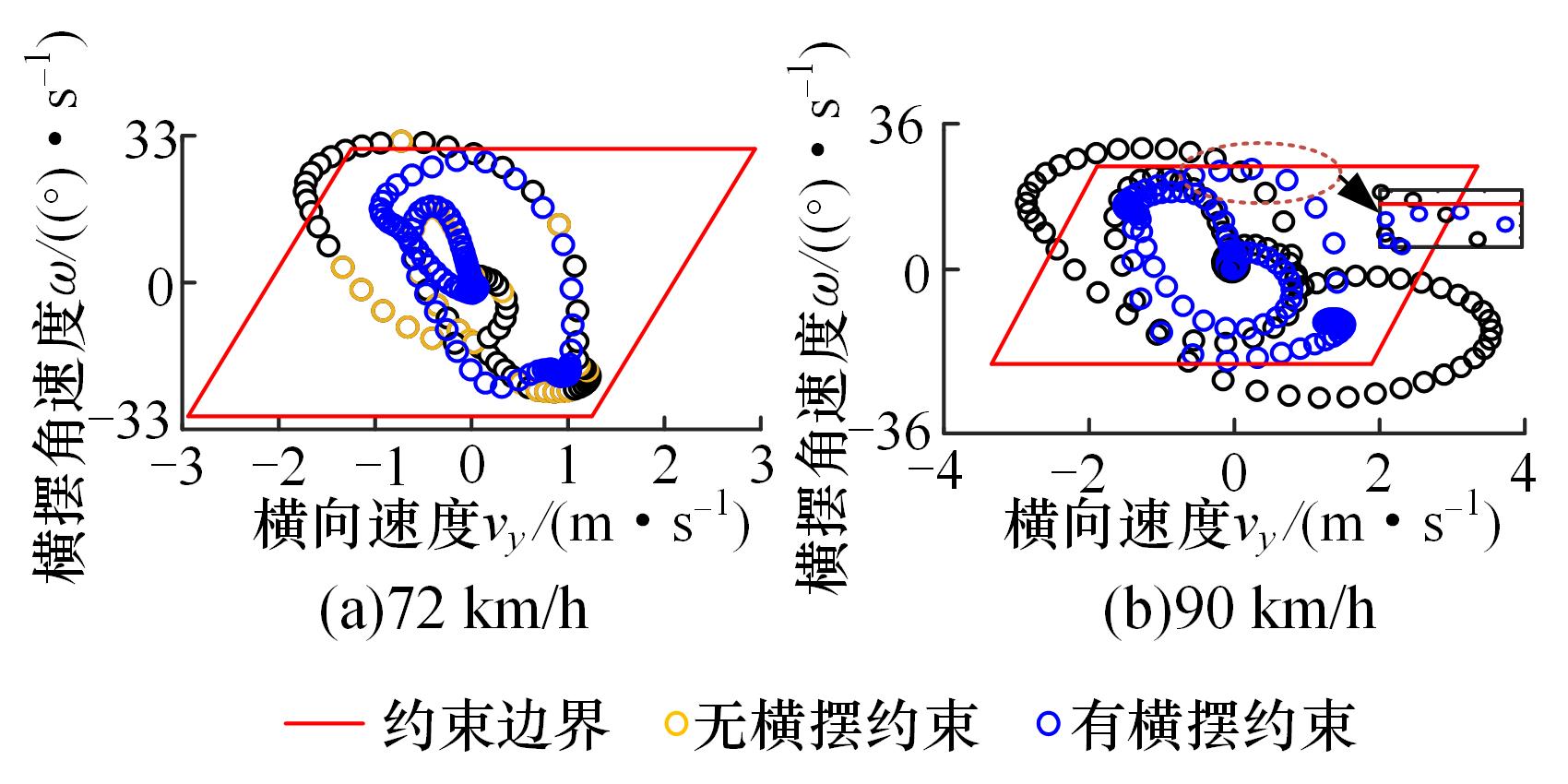
图17 不同车速下的横摆角速度对比
Fig.17 Comparison of lateral angular velocity at different vehicle speeds
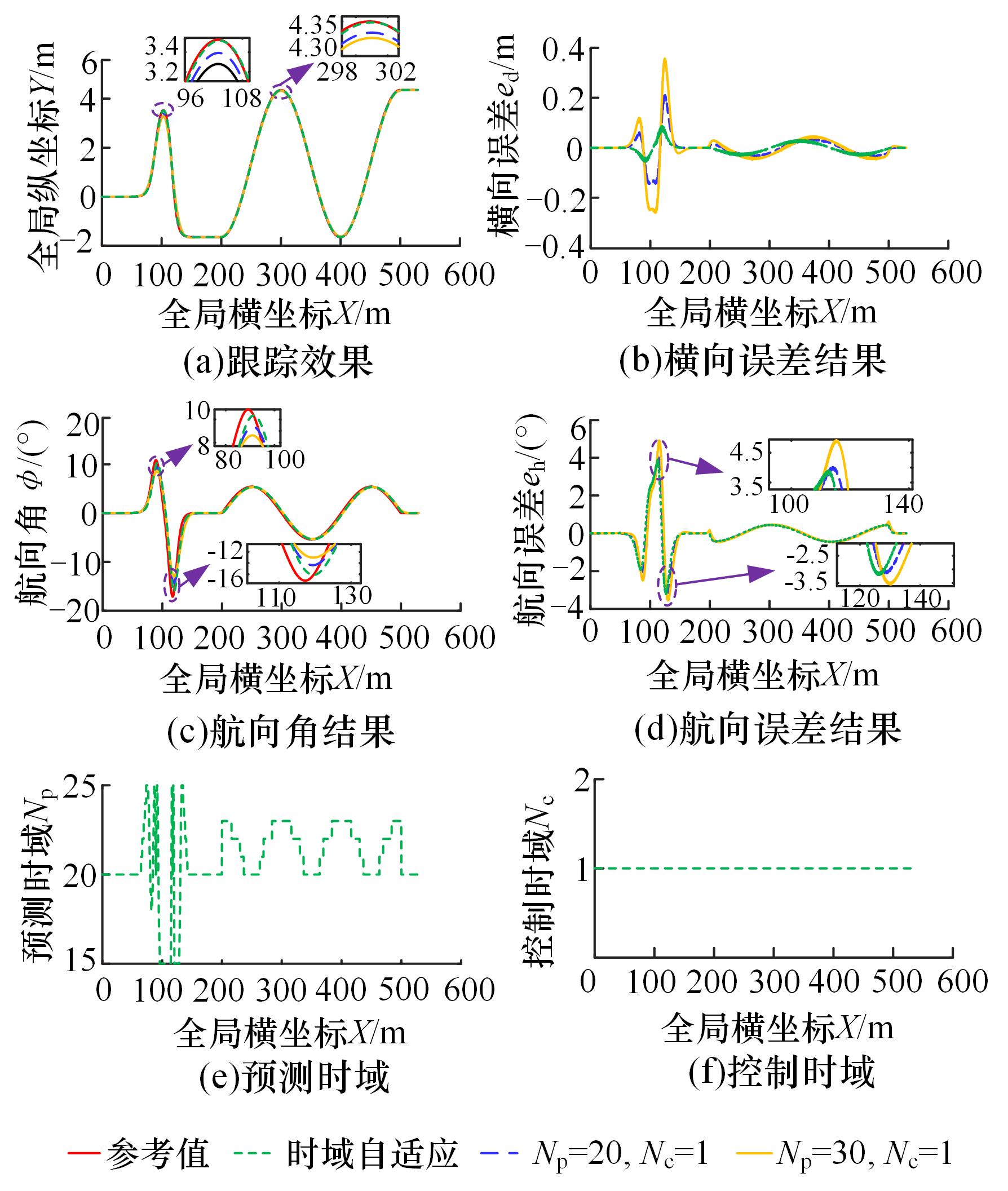
图18 30 km/h时的时域自适应跟踪效果
Fig.18 Time domain adaptive tracking effect at 30 km/h
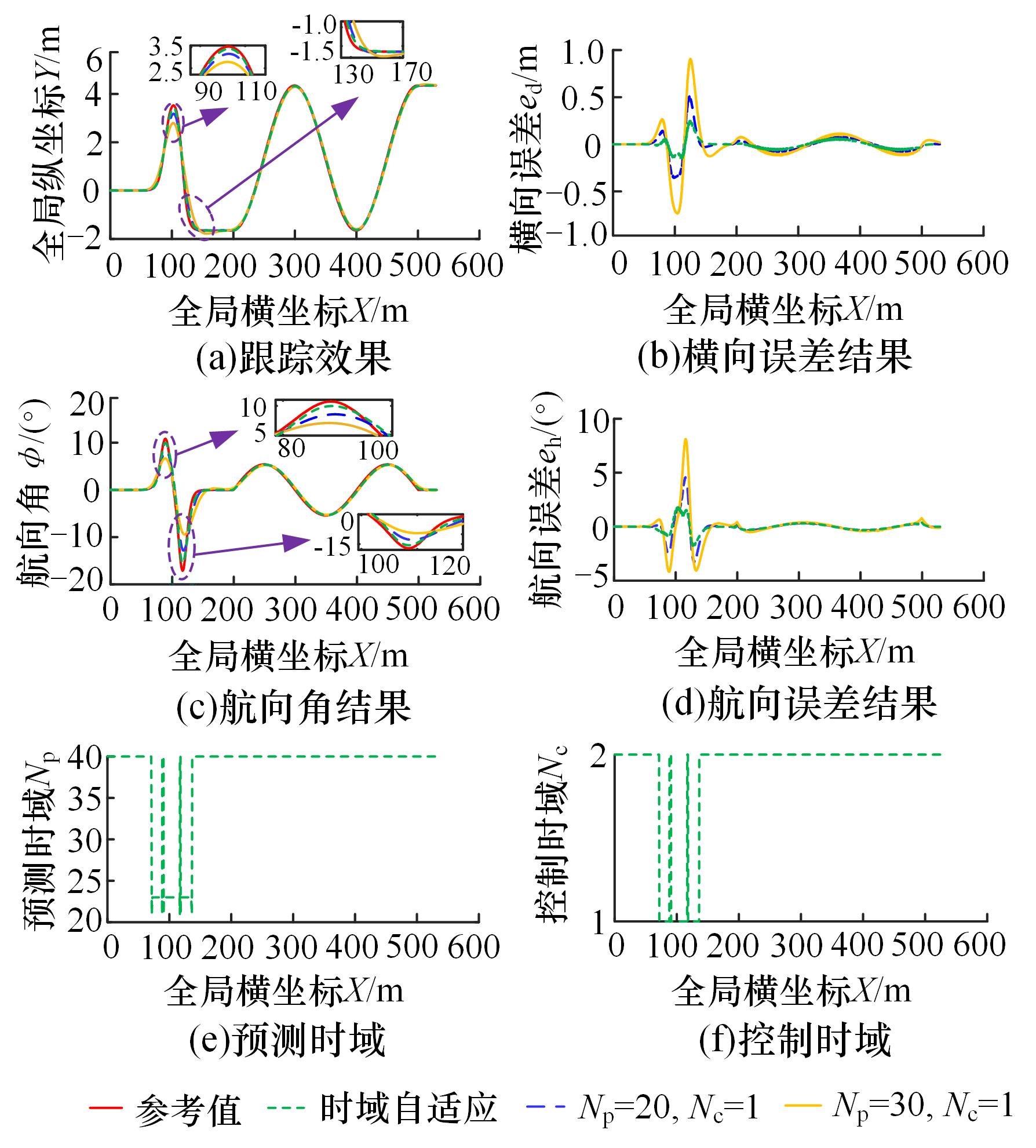
图19 60 km/h时的时域自适应跟踪效果
Fig.19 Time domain adaptive tracking effect at 60 km/h

图20 实车验证实验原型
Fig.20 Prototype of real vehicle verification experiment
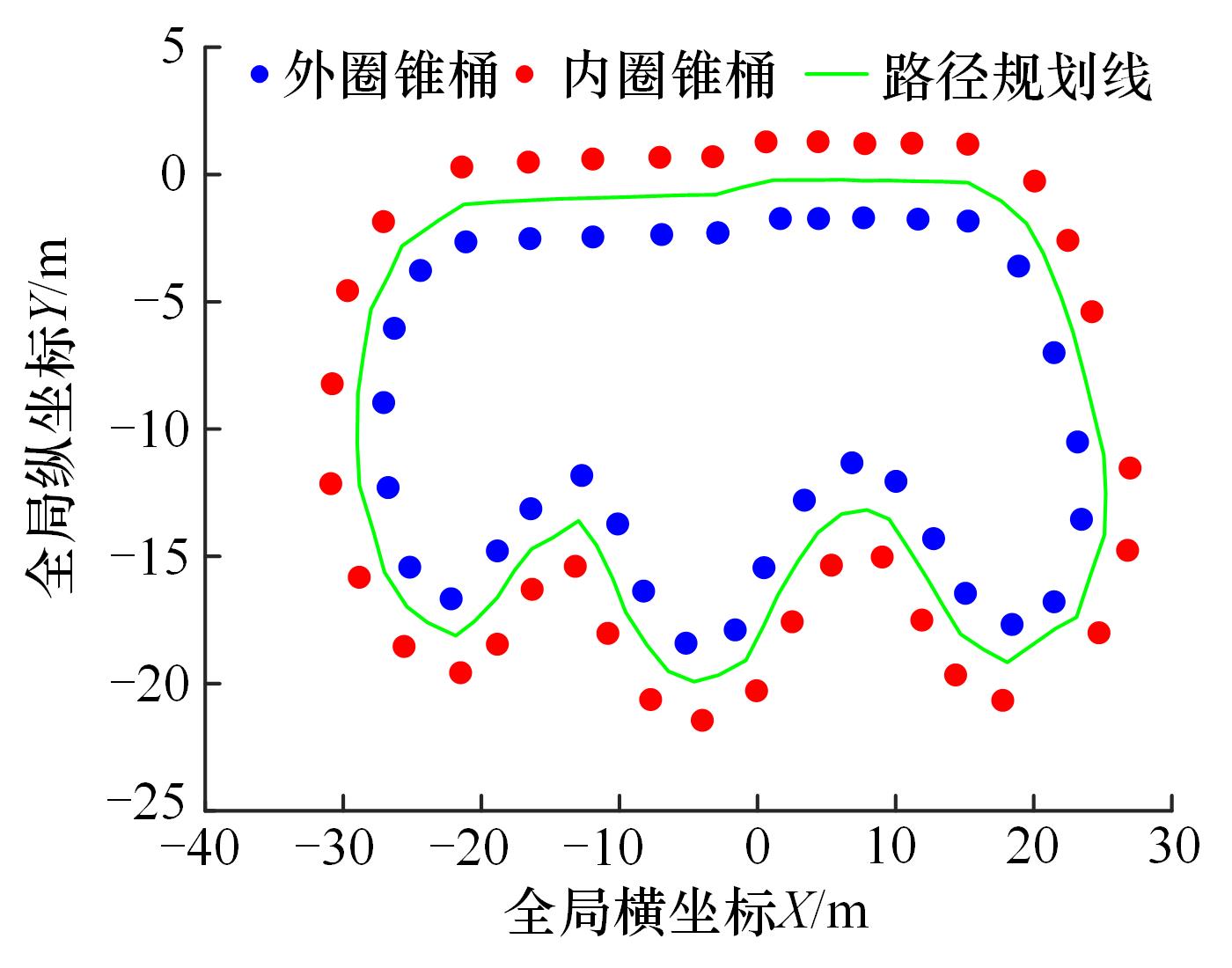
图21 SLAM建图及路径规划曲线
Fig.21 SLAM mapping and path planning curves
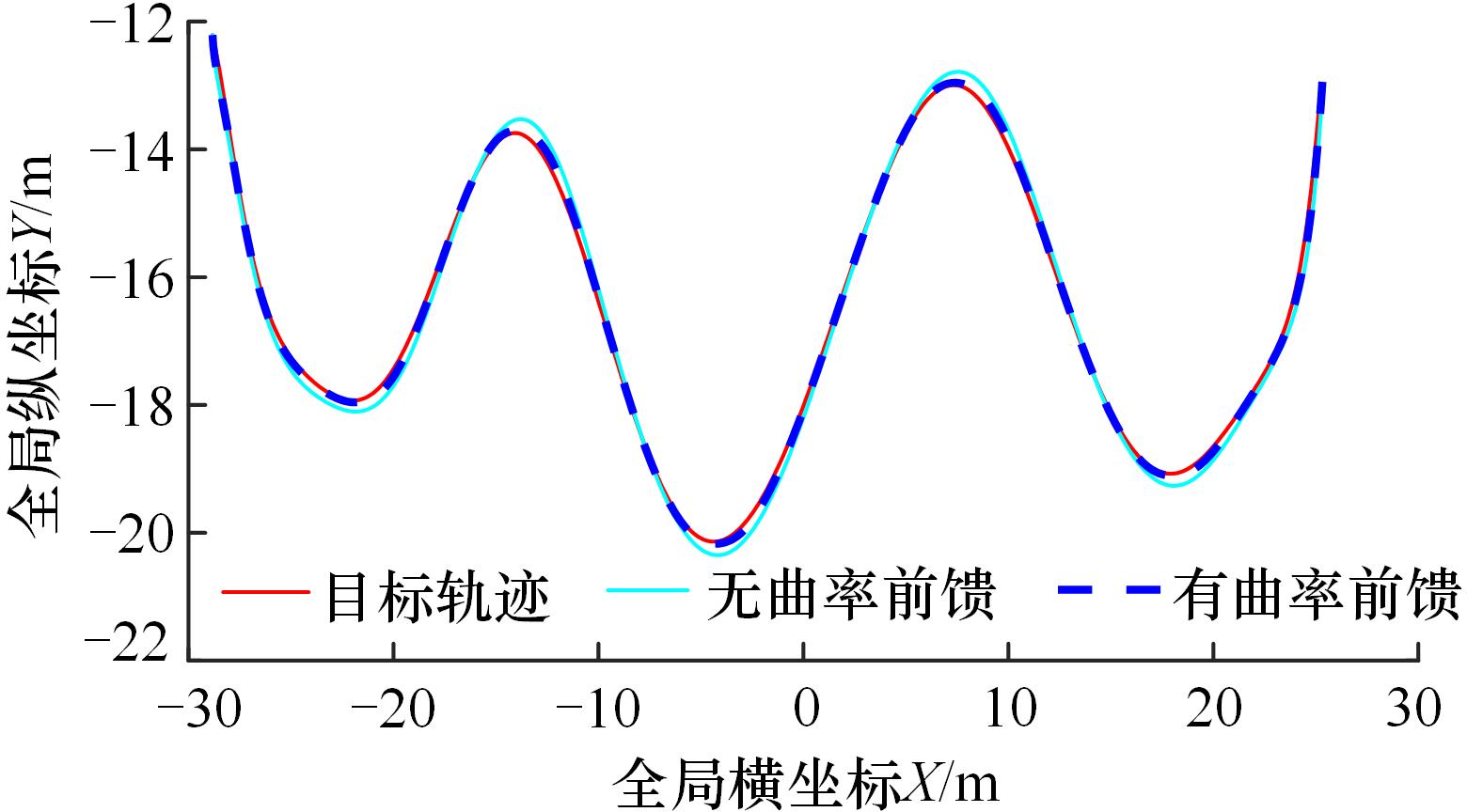
图22 策略优化前后跟踪效果图
Fig.22 Tracking effect diagram before and after strategy optimization
| [1] | 张智能, 李以农, 余颖弘 等. 复杂动态环境下智能汽车局部路径规划与跟踪算法研究[J]. 中国公路学报, 2022,35(9): 372-386. |
| ZHANG Zhineng, LI Yinong, YU Yinghong, et al. Research on Local Path Planning and Tracking Algorithms for Intelligent Vehicles in Complex Dynamic Environments[J]. China Journal of Highway and Transport, 2022, 35(9): 372-386. | |
| [2] | ABADJO M R, SIERRA-GARCÍA J E, SANTOS M. Evolutive Tuning Optimization of a PID Controller for Autonomous Path-following Robot[C]∥16th International Conference on Soft Computing Models in Industrial and Environmental Applications (SOCO 2021). Cham: Springer, 2022: 451-460. |
| [3] | TAGHAVIFAR H, HU C, QIN Y, et al. EKF-Neural Network Observer Based Type-2 Fuzzy Control of Autonomous Vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(8): 4788-4800. |
| [4] | 何洋,李刚,余孝楠.基于变论域的高速行驶智能汽车模糊模型预测控制方法研究[J].中国机械工程,2025,36(3):604-613. |
| HE Yang, LI Gang, YU Xiaonan. Research on Fuzzy Model Predictive Control Method for High-speed Intelligent Vehicles Based on Variable Domain Theory[J]. China Mechanical Engineering, 2025, 36(3): 604-613. | |
| [5] | XU Yong, ZHENG Guangwu, PAN Yajun. Off-policy Learning-based Following Control of Cooperative Autonomous Vehicles under Distributed Attacks [J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(5): 5120-5130. |
| [6] | SHI Tianyu, WANG Pin, CHENG Xuxin, et al. Driving Decision and Control for Automated Lane Change Behavior Based on Deep Reinforcement Learning[C]∥2019 IEEE Intelligent Transportation Systems Conference. Auckland, 2019:2895-2900. |
| [7] | LIU Lu, WANG Dan, PENG Zhouhua, et al. Distributed Path Following of Multiple Under-actuated Autonomous Surface Vehicles Based on Data-driven Neural Predictors via Integral Concurrent Learning [J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(12): 5334-5344. |
| [8] | 林歆悠,叶卓明,周斌豪.基于DQN强化学习的自动驾驶转向控制策略[J].机械工程学报,2023,59(16):315-324. |
| LIN Xinyou, YE Zhuoming, ZHOU Binhao. Automatic Driving Steering Control Strategy Based on DQN Reinforcement Learning [J]. Journal of Mechanical Engineering, 2023, 59(16): 315-324. | |
| [9] | KONG J, PFEIFFER M, SCHILDACH G, et al. Kinematic and Dynamic Vehicle Models for Autonomous Driving Control Design[C]∥2015 IEEE Intelligent Vehicles Symposiun. Seoul,2015:1094-1099. |
| [10] | LIU Qianjie, SONG Shuang, HU Huosheng, et al. Extended Model Predictive Control Scheme for Smooth Path Following of Autonomous Vehicles [J]. Frontiers of Mechanical Engineering, 2022, 17(1):4. |
| [11] | SHI Man, HE Hongwen, LI Jianwei, et al. Path Planning and Following Control of Autonomous Bus under Time-varying Parameters against Parametric Uncertainties and External Disturbances[J]. IEEE Transactions on Vehicular Technology, 2022, 71(7): 7057-7070. |
| [12] | YANG Zeyu, HUANG Jin, YANG Diange, et al. Design and Optimization of Robust Path Tracking Control for Autonomous Vehicles with Fuzzy Uncertainty[J]. IEEE Transactions on Fuzzy Systems, 2022, 30(6): 1788-1800. |
| [13] | 关龙新, 顾祖飞, 张超, 等. 考虑系统复杂扰动的智能车模型预测路径跟踪控制[J]. 汽车工程, 2022,44(12): 1844-1855. |
| GUAN Longxin, GU Zufei, ZHANG Chao, et al. Intelligent Vehicle Model Predictive Path Tracking Control Considering Complex System Disturbances [J]. Automotive Engineering, 2022, 44(12): 1844-1855. | |
| [14] | DAOUD M A, MEHREZ M W, RAYSIDE D, et al. Simultaneous Feasible Local Planning and Path-following Control for Autonomous Driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 16358-16370. |
| [15] | WANG Weida, ZHANG Yuhang, YANG Chao, et al. Adaptive Model Predictive Control-based Path Following Control for Four-wheel Independent Drive Automated Vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 14399-14412. |
| [16] | MILANI S, KHAYYAM H, MARZBANI H, et al. Smart Autodriver Algorithm for Real-time Autonomous Vehicle Trajectory Control[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(3): 1984-1995. |
| [17] | BRUGGEMANN S, POSSIERI C. On the Use of Difference of Log-Sum-Exp Neural Networks to Solve Data-driven Model Predictive Control Tracking Problems[J]. IEEE Control Systems Letters, 2021, 5(4): 1267-1272. |
| [18] | 何智成,王煜凡,韦宝侣,等.基于优化动力学模型的路径跟踪控制研究[J].中国机械工程,2024,35(6):1000-1009. |
| HE Zhicheng, WANG Yufan, WEI Baolv, et al. Research on Path Tracking Control Based on Optimization Dynamics Model[J]. China Mechanical Engineering,2024, 35(6): 1000-1009. | |
| [19] | 刘兴初, 张建武, 刘奋. 四轮转向非线性侧向动力学模型[J]. 上海交通大学学报,2005,39(9):1465-1469. |
| LIU Xingchu, ZHANG Jianwu, LIU Fen. Nonlinear Lateral Dynamics Model for Four-wheel Steering [J].Journal of Shanghai Jiao Tong University, 2005, 39(9):1465-1469. |
| [1] | 尹夕志1, 2, 3, 胡三宝1, 2, 3, 冯智勇1, 2, 3. 基于动态输出反馈的汽车横摆与侧倾稳定性控制[J]. 中国机械工程, 2025, 36(07): 1453-1462. |
| [2] | 阚小博1, 赵又群1, 李丹阳1, 林棻1, 何鲲鹏1, 2, 尤庆伸2. 基于非线性模型预测控制的分布式驱动电动汽车多目标扭矩协调控制[J]. 中国机械工程, 2025, 36(05): 1123-1131. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||