


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (4): 831-836.DOI: 10.3969/j.issn.1004-132X.2026.04.007
肖伟( ), 张聪, 陈绪兵()
), 张聪, 陈绪兵()
收稿日期:2025-08-08
出版日期:2026-04-25
发布日期:2026-05-11
通讯作者:
陈绪兵
作者简介:肖伟,男,1991年生,博士后研究人员。研究方向为工业机器人能耗预测与能效优化。Email:xiaowei@wit.edu.cn基金资助:
XIAO Wei(), ZHANG Cong, CHEN Xubing()
Received:2025-08-08
Online:2026-04-25
Published:2026-05-11
Contact:
CHEN Xubing
摘要:
为了实现在线、高效的工业机器人能耗预测,提出了一种基于贝叶斯优化时间卷积网络(TCN)的方法,通过TCN建立了运动学参数与机器人能耗之间的非线性映射关系,有效地捕捉了能耗预测数据的时序特征,通过贝叶斯方法对模型中的超参数进行寻优,提高了能耗预测模型的精度。IRB 1600-10/145工业机器人消融实验和对比实验结果表明,所提出的方法在无负载和1.5 kg负载下机器人平均总能耗相对误差分别为1.04%和1.78%,优于目前常用的其他能耗预测模型。
中图分类号:
肖伟, 张聪, 陈绪兵. 基于贝叶斯优化时间卷积网络的工业机器人能耗预测[J]. 中国机械工程, 2026, 37(4): 831-836.
XIAO Wei, ZHANG Cong, CHEN Xubing. Energy Consumption Prediction of Industrial Robots Based on Bayesian Optimized Temporal Convolutional Network[J]. China Mechanical Engineering, 2026, 37(4): 831-836.
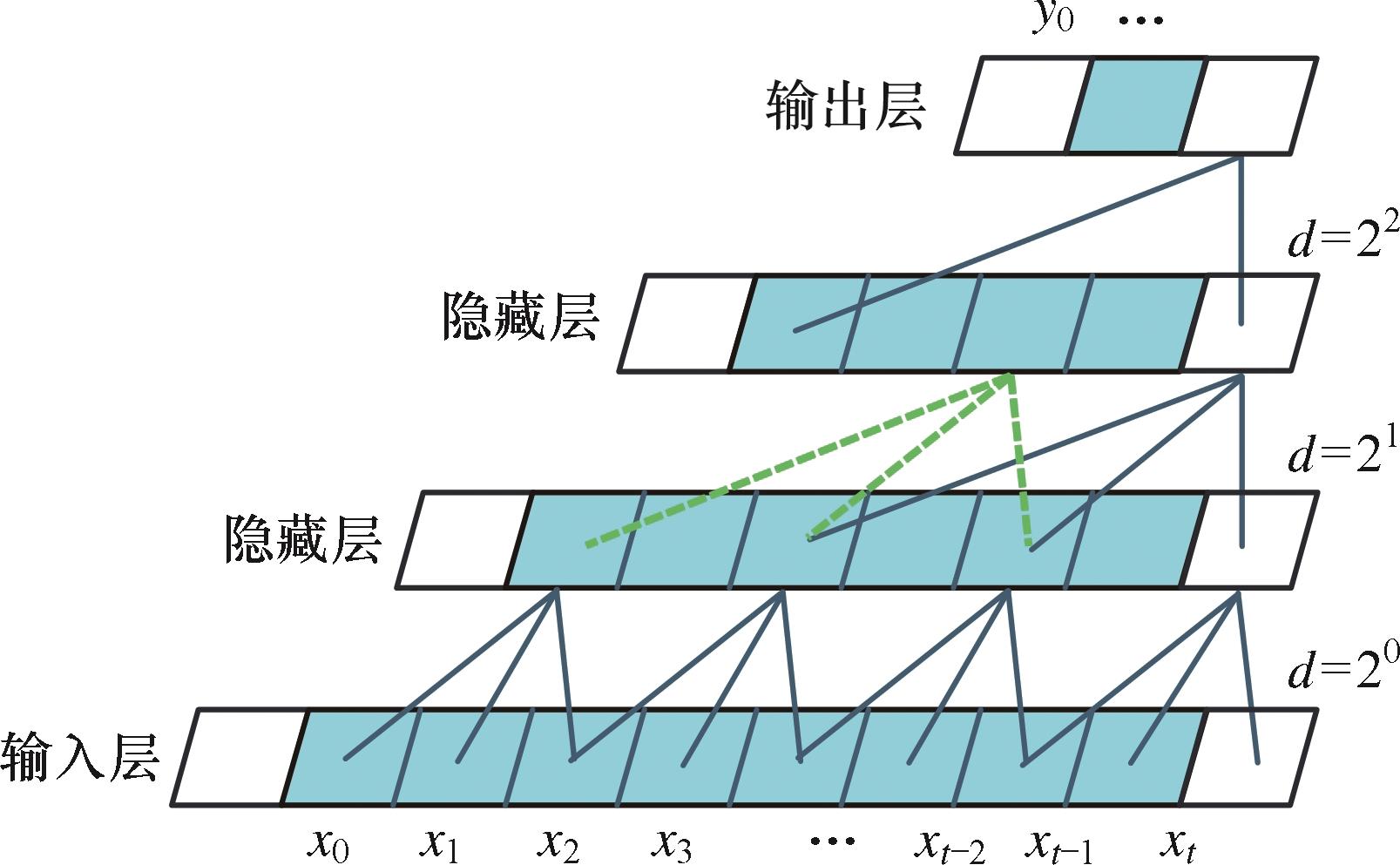
图1 膨胀因果卷积结构
Fig.1 Structure of dilated causal convolutions
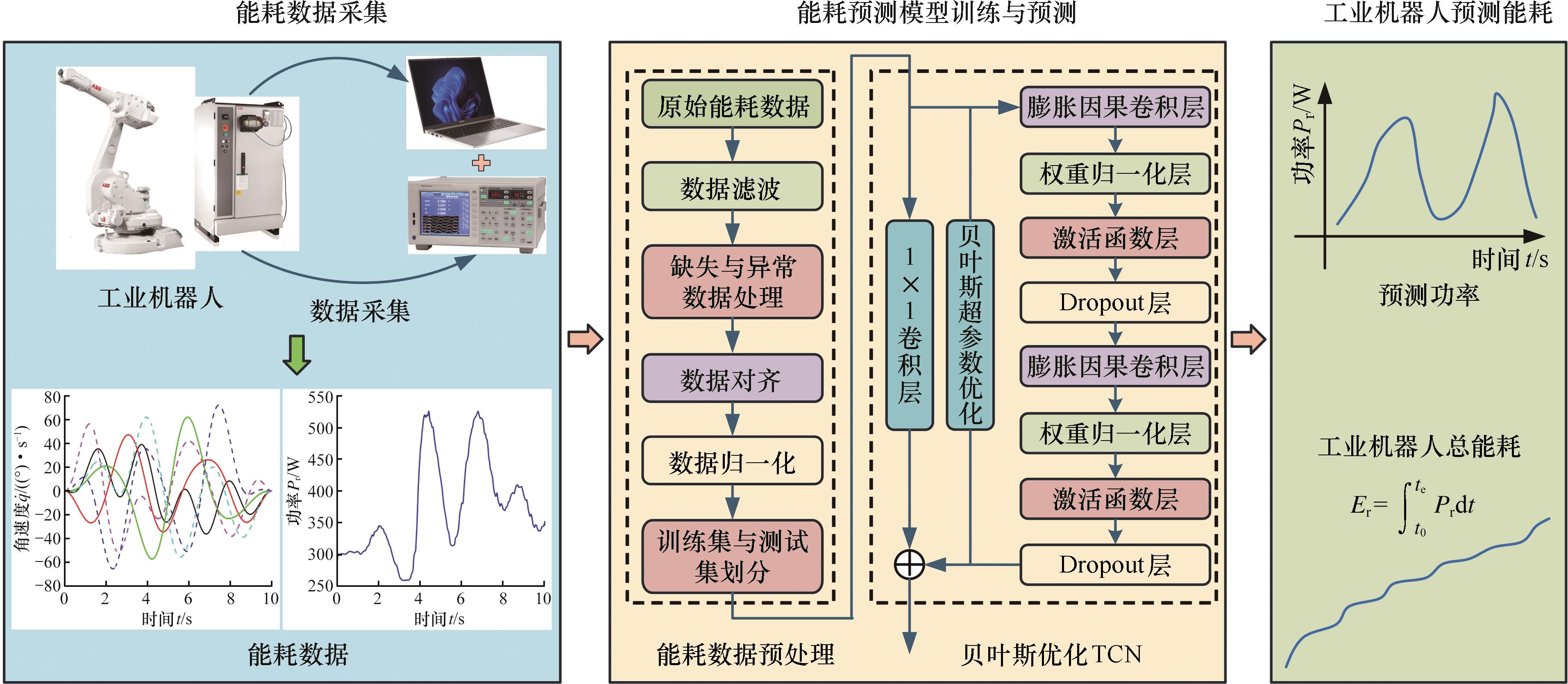
图2 基于贝叶斯优化 TCN 的能耗预测过程
Fig.2 Energy consumption prediction process of TCN based on Bayesian optimization

图3 实验平台
Fig.3 Experimental platform
| 参数 | 值 | 超参数 | 寻优范围 | 寻优值 |
|---|---|---|---|---|
| 学习调整因子 | 0.1 | 学习率 | 10 | 0.001 |
| 残差块 | 2 | 层数 | 1~6 | 2 |
| 梯度阈值 | 1 | 核大小 | 2~6 | 3 |
| 初始学习率 | 0.001 | 滤波器 | 8~16 | 10 |
表1 TCN模型参数及超参数
Tab.1 TCN model parameters and hyperparameters
| 参数 | 值 | 超参数 | 寻优范围 | 寻优值 |
|---|---|---|---|---|
| 学习调整因子 | 0.1 | 学习率 | 10 | 0.001 |
| 残差块 | 2 | 层数 | 1~6 | 2 |
| 梯度阈值 | 1 | 核大小 | 2~6 | 3 |
| 初始学习率 | 0.001 | 滤波器 | 8~16 | 10 |
| 参数 | 值 | ||
|---|---|---|---|
| CNN | LSTM | CNN-LSTM | |
| 优化器 | Adam | Adam | Adam |
| LSTM层数 | 64 | 25 | |
| 每个卷积核大小 | 3*1 | 3*1 | |
| 最大迭代次数 | 250 | 250 | 250 |
| 梯度阈值 | 1 | 1 | 1 |
| 初始学习率 | 0.02 | 0.01 | 0.01 |
| 学习调整因子 | 0.05 | 0.10 | 0.10 |
| 学习因子调整周期 | 150 | 150 | 150 |
表2 基准方法网络参数
Tab. 2 Baseline method network parameters
| 参数 | 值 | ||
|---|---|---|---|
| CNN | LSTM | CNN-LSTM | |
| 优化器 | Adam | Adam | Adam |
| LSTM层数 | 64 | 25 | |
| 每个卷积核大小 | 3*1 | 3*1 | |
| 最大迭代次数 | 250 | 250 | 250 |
| 梯度阈值 | 1 | 1 | 1 |
| 初始学习率 | 0.02 | 0.01 | 0.01 |
| 学习调整因子 | 0.05 | 0.10 | 0.10 |
| 学习因子调整周期 | 150 | 150 | 150 |
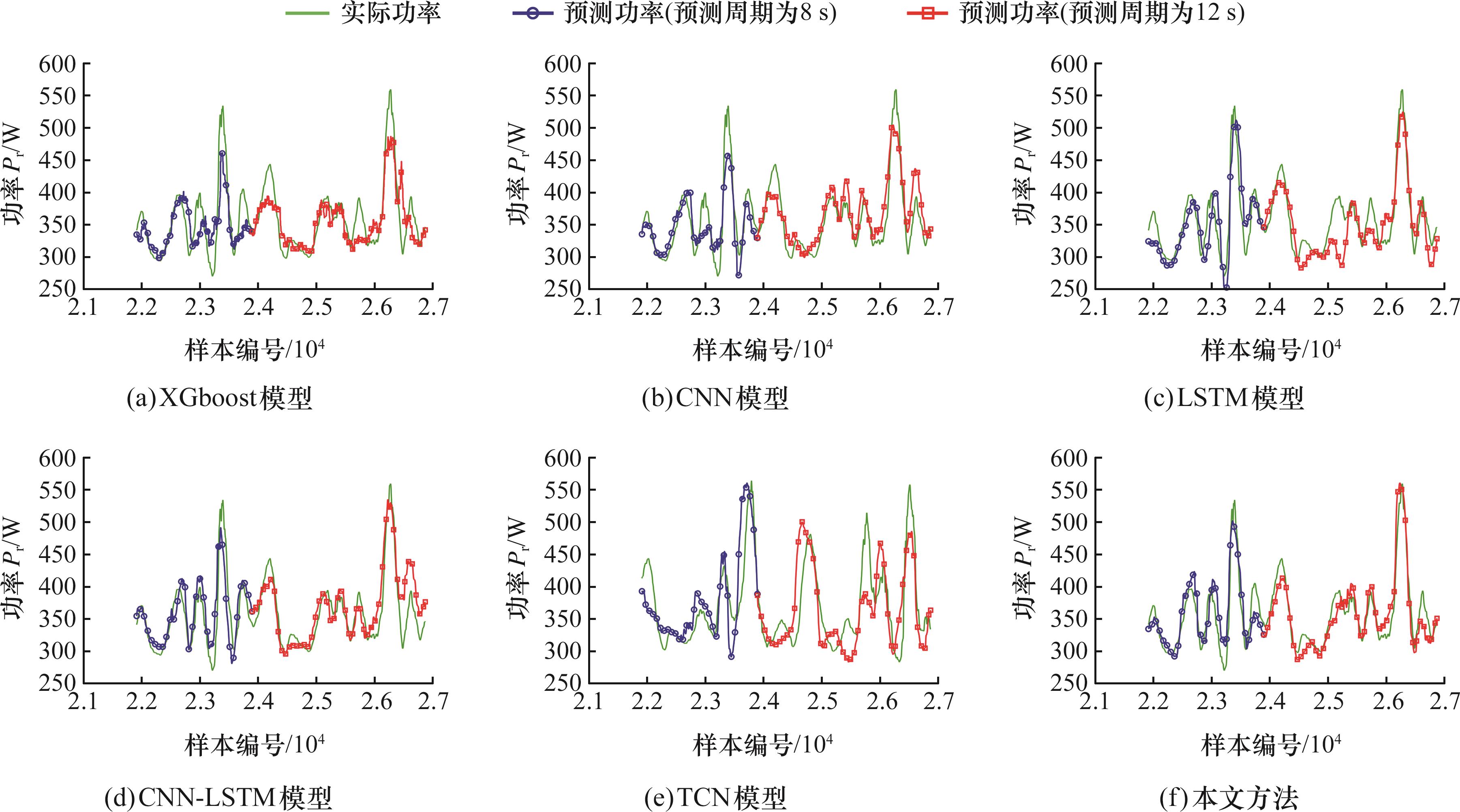
图4 不同模型工业机器人消耗功率预测结果(无负载)
Fig.4 Different models of industrial robot power consumption prediction results(no-load)
| 评估方法 | 负载 | 轨迹时长 | 模型 | |||||
|---|---|---|---|---|---|---|---|---|
| XGboost | CNN | LSTM | CNN-LSTM | TCN | 本文方法 | |||
| MAE/W | 无负载 | 8 s | 26.13 | 21.26 | 24.11 | 21.81 | 29.96 | 20.72 |
| 12 s | 21.22 | 20.71 | 23.24 | 20.12 | 34.50 | 16.05 | ||
| 平均值 | 23.68 | 20.99 | 23.68 | 20.97 | 32.23 | 18.39 | ||
| 1.5 kg | 8 s | 22.73 | 28.26 | 28.25 | 23.43 | 25.20 | 25.12 | |
| 12 s | 30.13 | 37.71 | 26.75 | 25.92 | 31.32 | 28.84 | ||
| 平均值 | 26.43 | 32.99 | 27.50 | 24.68 | 28.26 | 26.89 | ||
| RMSE/W | 无负载 | 8 s | 36.02 | 27.39 | 30.01 | 29.10 | 42.28 | 24.71 |
| 12 s | 29.30 | 25.80 | 30.64 | 26.84 | 45.61 | 20.22 | ||
| 平均值 | 32.66 | 26.60 | 30.33 | 27.97 | 43.95 | 22.47 | ||
| 1.5 kg | 8 s | 29.85 | 24.27 | 34.37 | 30.50 | 32.47 | 37.76 | |
| 12 s | 41.26 | 32.04 | 33.36 | 33.62 | 38.02 | 38.21 | ||
| 平均值 | 35.56 | 28.16 | 33.87 | 32.06 | 35.25 | 37.99 | ||
| 无负载 | 8 s | 2.08 | 1.82 | 1.16 | 1.56 | 1.38 | 1.06 | |
| 12 s | 1.58 | 2.79 | 2.93 | 2.35 | 1.42 | 1.01 | ||
| 平均值 | 1.83 | 2.31 | 2.045 | 1.96 | 1.40 | 1.04 | ||
| 1.5 kg | 8 s | 4.29 | 3.45 | 2.09 | 4.48 | 2.83 | 2.05 | |
| 12 s | 1.25 | 1.92 | 1.53 | 1.59 | 1.86 | 1.51 | ||
| 平均值 | 2.77 | 2.69 | 1.81 | 3.04 | 2.35 | 1.78 | ||
表3 不同模型在8 s及12 s预测时长下的能耗预测误差
Tab. 3 The energy consumption prediction errors of different models under 8 s and 12 s prediction time are compared
| 评估方法 | 负载 | 轨迹时长 | 模型 | |||||
|---|---|---|---|---|---|---|---|---|
| XGboost | CNN | LSTM | CNN-LSTM | TCN | 本文方法 | |||
| MAE/W | 无负载 | 8 s | 26.13 | 21.26 | 24.11 | 21.81 | 29.96 | 20.72 |
| 12 s | 21.22 | 20.71 | 23.24 | 20.12 | 34.50 | 16.05 | ||
| 平均值 | 23.68 | 20.99 | 23.68 | 20.97 | 32.23 | 18.39 | ||
| 1.5 kg | 8 s | 22.73 | 28.26 | 28.25 | 23.43 | 25.20 | 25.12 | |
| 12 s | 30.13 | 37.71 | 26.75 | 25.92 | 31.32 | 28.84 | ||
| 平均值 | 26.43 | 32.99 | 27.50 | 24.68 | 28.26 | 26.89 | ||
| RMSE/W | 无负载 | 8 s | 36.02 | 27.39 | 30.01 | 29.10 | 42.28 | 24.71 |
| 12 s | 29.30 | 25.80 | 30.64 | 26.84 | 45.61 | 20.22 | ||
| 平均值 | 32.66 | 26.60 | 30.33 | 27.97 | 43.95 | 22.47 | ||
| 1.5 kg | 8 s | 29.85 | 24.27 | 34.37 | 30.50 | 32.47 | 37.76 | |
| 12 s | 41.26 | 32.04 | 33.36 | 33.62 | 38.02 | 38.21 | ||
| 平均值 | 35.56 | 28.16 | 33.87 | 32.06 | 35.25 | 37.99 | ||
| 无负载 | 8 s | 2.08 | 1.82 | 1.16 | 1.56 | 1.38 | 1.06 | |
| 12 s | 1.58 | 2.79 | 2.93 | 2.35 | 1.42 | 1.01 | ||
| 平均值 | 1.83 | 2.31 | 2.045 | 1.96 | 1.40 | 1.04 | ||
| 1.5 kg | 8 s | 4.29 | 3.45 | 2.09 | 4.48 | 2.83 | 2.05 | |
| 12 s | 1.25 | 1.92 | 1.53 | 1.59 | 1.86 | 1.51 | ||
| 平均值 | 2.77 | 2.69 | 1.81 | 3.04 | 2.35 | 1.78 | ||
| [1] | LENG Jiewu, ZHOU Man, XIAO Yuxuan, et al. Digital Twins-based Remote Semi-physical Commissioning of Flow-type Smart Manufacturing Systems[J]. Journal of Cleaner Production, 2021, 306: 127278. |
| [2] | Chong LYU, ZOU Lai, HUANG Yun, et al. A Novel Toolpath for Robotic Adaptive Grinding of Extremely Thin Blade Edge Based on Dwell Time Model[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 4429-4439. |
| [3] | MEIKE D, PELLICCIARI M, BERSELLI G. Energy Efficient Use of Multirobot Production Lines in the Automotive Industry: Detailed System Modeling and Optimization[J]. IEEE Transactions on Automation Science and Engineering, 2014, 11(3): 798-809. |
| [4] | XIAO Wei, HAN Guirong, ALLY A S, et al. Energy Consumption Modeling and Parameter Identification Based on System Decomposition of Welding Robots[J]. The International Journal of Advanced Manufacturing Technology, 2024, 130(3): 1579-1594. |
| [5] | RIAZI S, WIGSTRÖM O, BENGTSSON K, et al. Energy and Peak Power Optimization of Time-bounded Robot Trajectories[J]. IEEE Transactions on Automation Science and Engineering, 2017, 14(2): 646-657. |
| [6] | ZHOU Jin, YI Hao, CAO Huajun, et al. Structural Decomposition-based Energy Consumption Modeling of Robot Laser Processing Systems and Energy-efficient Analysis[J]. Robotics and Computer-Integrated Manufacturing, 2022, 76: 102327. |
| [7] | HEREDIA J, SCHLETTE C, KJÆRGAARD M B. Data-driven Energy Estimation of Individual Instructions in User-defined Robot Programs for Collaborative Robots[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 6836-6843. |
| [8] | LIU Aiming, LIU Huan, YAO Bitao, et al. Energy Consumption Modeling of Industrial Robot Based on Simulated Power Data and Parameter Identification[J]. Advances in Mechanical Engineering, 2018, 10(5): 1687814018773852. |
| [9] | 庹军波, 彭秋媛, 张贤明, 等. 工业机器人能耗预测研究[J]. 中国机械工程, 2022, 33(22): 2727-2732. |
| JunboTUO, PENG Qiuyuan, ZHANG Xianming, et al. Research on Energy Consumption Prediction of Industrial Robots[J]. China Mechanical Engineering, 2022, 33(22): 2727-2732. | |
| [10] | YAN Jihong, ZHANG Mingyang. A Transfer-learning Based Energy Consumption Modeling Method for Industrial Robots[J]. Journal of Cleaner Production, 2021, 325: 129299. |
| [11] | JIANG Pei, WANG Zuoxue, LI Xiaobin, et al. Energy Consumption Prediction and Optimization of Industrial Robots Based on LSTM[J]. Journal of Manufacturing Systems, 2023, 70: 137-148. |
| [12] | WANG Zuoxue, JIANG Pei, LI Xiaobin, et al. A Novel Hybrid LSTM and Masked Multi-head Attention Based Network for Energy Consumption Prediction of Industrial Robots[J]. Applied Energy, 2025, 383: 125223. |
| [13] | JIANG Pei, ZHENG Jiajun, WANG Zuoxue, et al. Industrial Robot Energy Consumption Model Identification: a Coupling Model-driven and Data-driven Paradigm[J]. Expert Systems with Applications, 2025, 262: 125604. |
| [14] | 刘譞, 姬亚东, 朱开鹏, 等. 煤层顶板涌水量TCN-LSTM-SVM时间序列预测模型构建与应用[J]. 煤田地质与勘探, 2025, 53(6): 201-211. |
| LIU Xuan, JI Yadong, ZHU Kaipeng, et al. Construction and Application of TCN-LSTM-SVM Time Series Prediction Model for Water Inflow from Coal Seam Roof[J]. Coal Geology & Exploration, 2025, 53(6): 201-211. | |
| [15] | 马将, 韩宏帅, 贾钰峰, 等. 融合遗传算法的GRA-TCN-BiLSTM钢铁工业能耗预测[J]. 中国冶金, 2025, 35(4): 155-165. |
| MA Jiang, HAN Hongshuai, JIA Yufeng, et al. Energy Consumption Prediction of GRA-TCN-BiLSTM Iron and Steel Industry Based on Genetic Algorithm[J]. China Metallurgy, 2025, 35(4): 155-165. | |
| [16] | 邓晓强,战韬阳,项薇,等.基于TCN-BiGRU-SE两阶段特征提取与多特征融合的注塑质量预测方法[J].中国机械工程,2026,37(2): 416-427. |
| DENG Xiaoqiang, ZHAN Taoyang, XIANG Wei, LIN Wenwen, YU Junhe, ZHENG Zhipeng. Injection Molding Quality Prediction Method Based on Two-stage Feature Extraction and Multi-feature Fusion Using TCN-BiGRU-SE Model[J]. China Mechanical Engineering,2026,37(2): 416-427. | |
| [17] | 贺挺伟,谢长君,杨扬,等.基于TCN-LSTM与迁移学习融合的PEMFC多工况动态退化特性研究[J/OL].中国电机工程学报. . |
| HE Tingwei, XIE Changjun, YANG Yang, et al. Multi-condition Dynamic Degradation Characteristics of PEMFC Using TCN-LSTM and Transfer Learning[J/OL]. Proceedings of the CSEE. . | |
| [18] | 陈剑, 严明辉, 陈品. 基于贝叶斯优化多尺度DenseNet的离心泵声信号故障诊断方法[J]. 中国机械工程,2025,36(9): 2032-2038. |
| CHEN Jian, YAN Minghui, CHEN Pin. Fault Diagnosis Method of Centrifugal Pump Acoustic Signal Based on Bayesian Optimization Multi-scale DenseNet[J]. China Mechanical Engineering, 2025,36(9): 2032-2038. | |
| [19] | QIN Zhongkai, BARON L, BIRGLEN L. A New Approach to the Dynamic Parameter Identification of Robotic Manipulators[J]. Robotica, 2010, 28(4): 539-547. |
| [20] | XU Wei, ZHU Hui, ZHENG Yandong, et al. ELXGB: an Efficient and Privacy-preserving XGBoost for Vertical Federated Learning[J]. IEEE Transactions on Services Computing, 2024, 17(3): 878-892. |
| [1] | 孙悦, 黄辉, 尹方辰. 高负载动态工况下工业机器人的能耗预测[J]. 中国机械工程, 2026, 37(4): 939-947. |
| [2] | 杨雨1, 2, 李晓雷2, 陶友瑞1, 2, 郭祺雨1, 2, 叶楠1, 2. RV减速器服役工况加速载荷谱编制方法[J]. 中国机械工程, 2025, 36(06): 1170-1177. |
| [3] | 高贯斌1, 2, 赵思郭1, 2, 李映杰1, 2. 基于关节扭矩平衡的机器人末端负载建模及辨识[J]. 中国机械工程, 2025, 36(06): 1188-1197. |
| [4] | 李路骋, 王振忠, 黄雪鹏. 基于模糊阻抗控制的机器人气囊抛光恒力控制系统研究[J]. 中国机械工程, 2025, 36(05): 1028-1034. |
| [5] | 王桂荣, 倪志强, 周坤, 王斌锐. 多策略改进粒子群算法的机械臂时间最优轨迹规划[J]. 中国机械工程, 2025, 36(05): 1044-1053. |
| [6] | 姜吉光, 侯爵, 苏成志, 巴麒蛟, 田爱鑫, 徐明宇. 面向物理约束的机器人运动学标定最优位姿集规划方法研究[J]. 中国机械工程, 2024, 35(03): 472-480. |
| [7] | 陈卓凡, 周坤, 秦菲菲, 王斌锐. 基于改进量子粒子群优化算法的机器人逆运动学求解#br#
#br#
[J]. 中国机械工程, 2024, 35(02): 293-304. |
| [8] | 荣誉, 陈刚, 豆天赐, . 一种多指标综合最优的抗冲击轨迹规划方法[J]. 中国机械工程, 2024, 35(02): 305-316. |
| [9] | 谢阳, 戴逸群, 张超勇, 刘金锋. 融合集成模型与深度学习的机床能耗识别与预测方法[J]. 中国机械工程, 2023, 34(24): 2963-2974. |
| [10] | 杨飞, 蒋威, 陈诚, 黄志高, 周华民, . 红外热源辅助开放空间工业机器人熔融沉积成形装备设计与成形性能研究[J]. 中国机械工程, 2023, 34(11): 1343-1352,1385. |
| [11] | 张俊鑫, 陈威, 黄斯凯, 吴海彬. 基于力位混合导向的工业机器人顺槽运动控制策略[J]. 中国机械工程, 2023, 34(06): 712-719,726. |
| [12] | 庹军波, 彭秋媛, 张贤明, 李聪波. 工业机器人能耗预测研究[J]. 中国机械工程, 2022, 33(22): 2727-2732,2740. |
| [13] | 刘怀兰, 赵文杰, 李世壮, 岳鹏, 马宝瑞. 数字孪生车间机器人虚实驱动系统构建方法[J]. 中国机械工程, 2022, 33(21): 2623-2632. |
| [14] | 倪华康, 杨泽源, 杨一帆, 陈新渡, 严思杰, 丁汉. 考虑基坐标系误差的机器人运动学标定方法[J]. 中国机械工程, 2022, 33(06): 647-655. |
| [15] | 张恩政, 唐宁敏, 陈刚, 刘翠苹. 基于改进IGG3权函数距离误差模型的工业机器人标定[J]. 中国机械工程, 2021, 32(13): 1539-1546. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||