


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2026, Vol. 37 ›› Issue (3): 586-594.DOI: 10.3969/j.issn.1004-132X.2026.03.008
• 机械基础工程 • 上一篇
陈修龙( ), 孙垂军, 邓昱()
), 孙垂军, 邓昱()
收稿日期:2025-03-19
出版日期:2026-03-25
发布日期:2026-04-08
通讯作者:
邓昱
作者简介:陈修龙,男,1976年生,教授、博士研究生导师。研究方向为机械系统动力学、机器人机构学理论与应用。E-mail:cxldy99@163.com基金资助:
CHEN Xiulong(), SUN Chuijun, DENG Yu()
Received:2025-03-19
Online:2026-03-25
Published:2026-04-08
Contact:
DENG Yu
摘要:
为了精确预测空间并联机构在运动副间隙与构件弹性共同作用下的动力学特性,以3-RRPaR空间并联机构为研究对象,建立了含间隙机构刚柔耦合动力学模型,并采用四阶龙格-库塔法和广义-
中图分类号:
陈修龙, 孙垂军, 邓昱. 含间隙空间并联机构刚柔耦合动力学分析与试验[J]. 中国机械工程, 2026, 37(3): 586-594.
CHEN Xiulong, SUN Chuijun, DENG Yu. Rigid-Flexible Coupling Dynamics Analyses and Experiments of Spatial Parallel Mechanisms with Clearances[J]. China Mechanical Engineering, 2026, 37(3): 586-594.
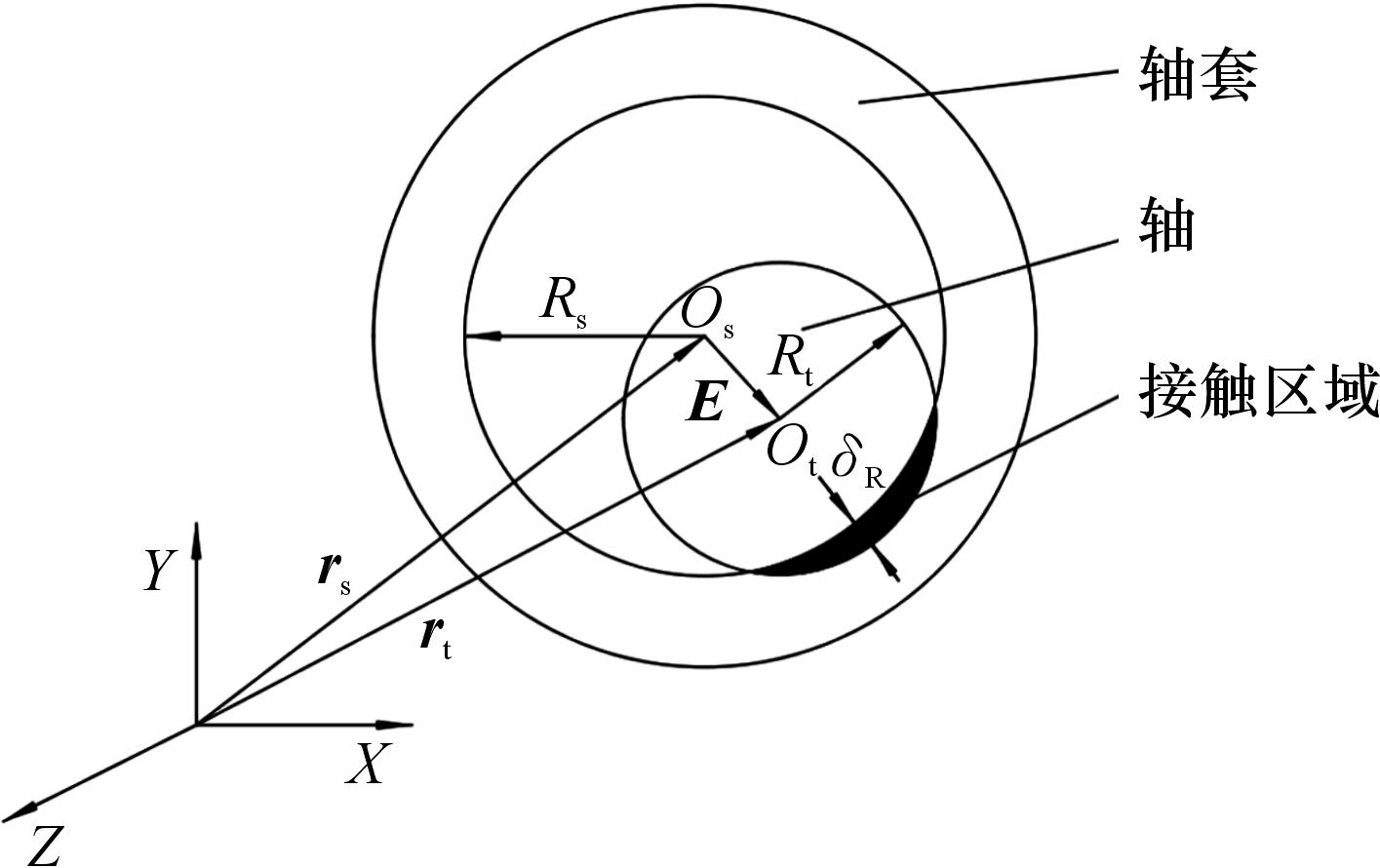
图1 干摩擦间隙模型
Fig.1 Model of dry clearance
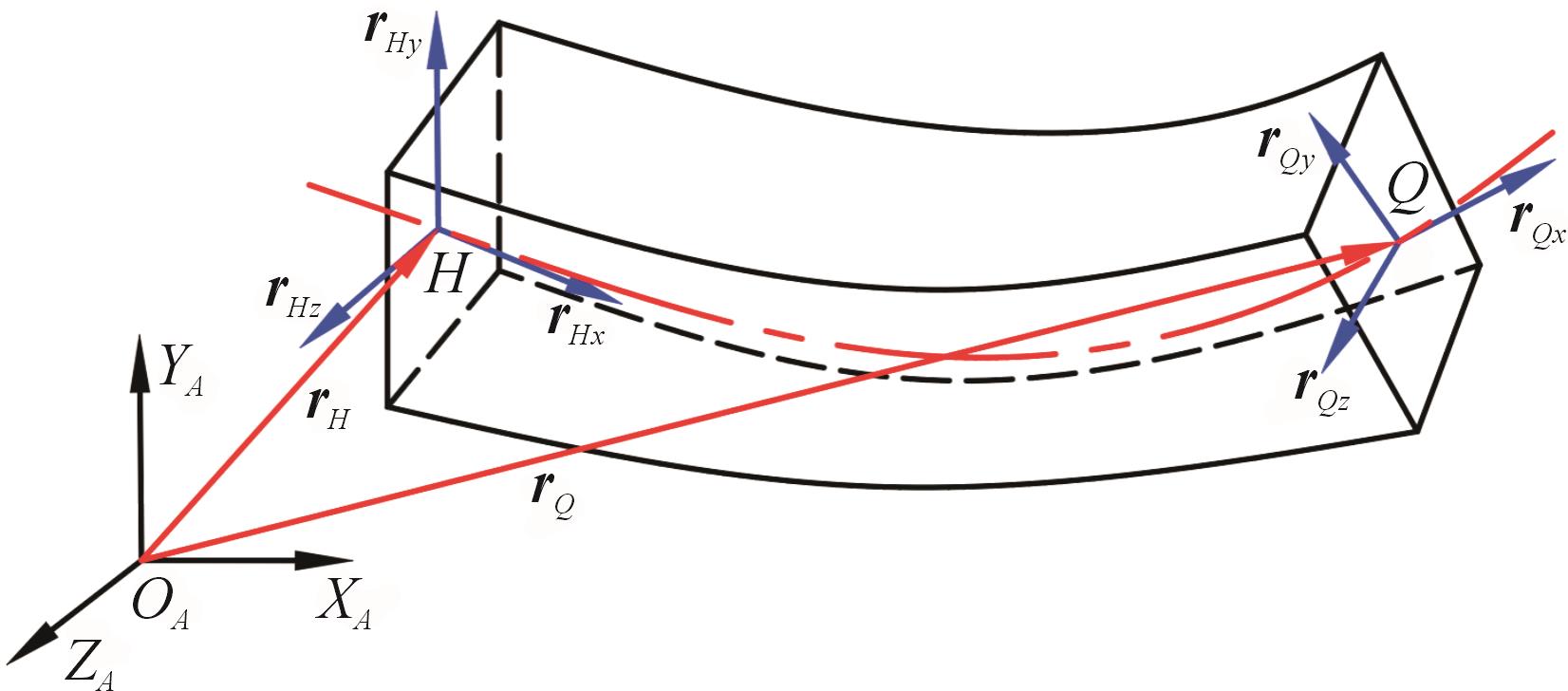
图2 三维二节点梁单元模型
Fig. 2 Three-dimensional two-node beam element model
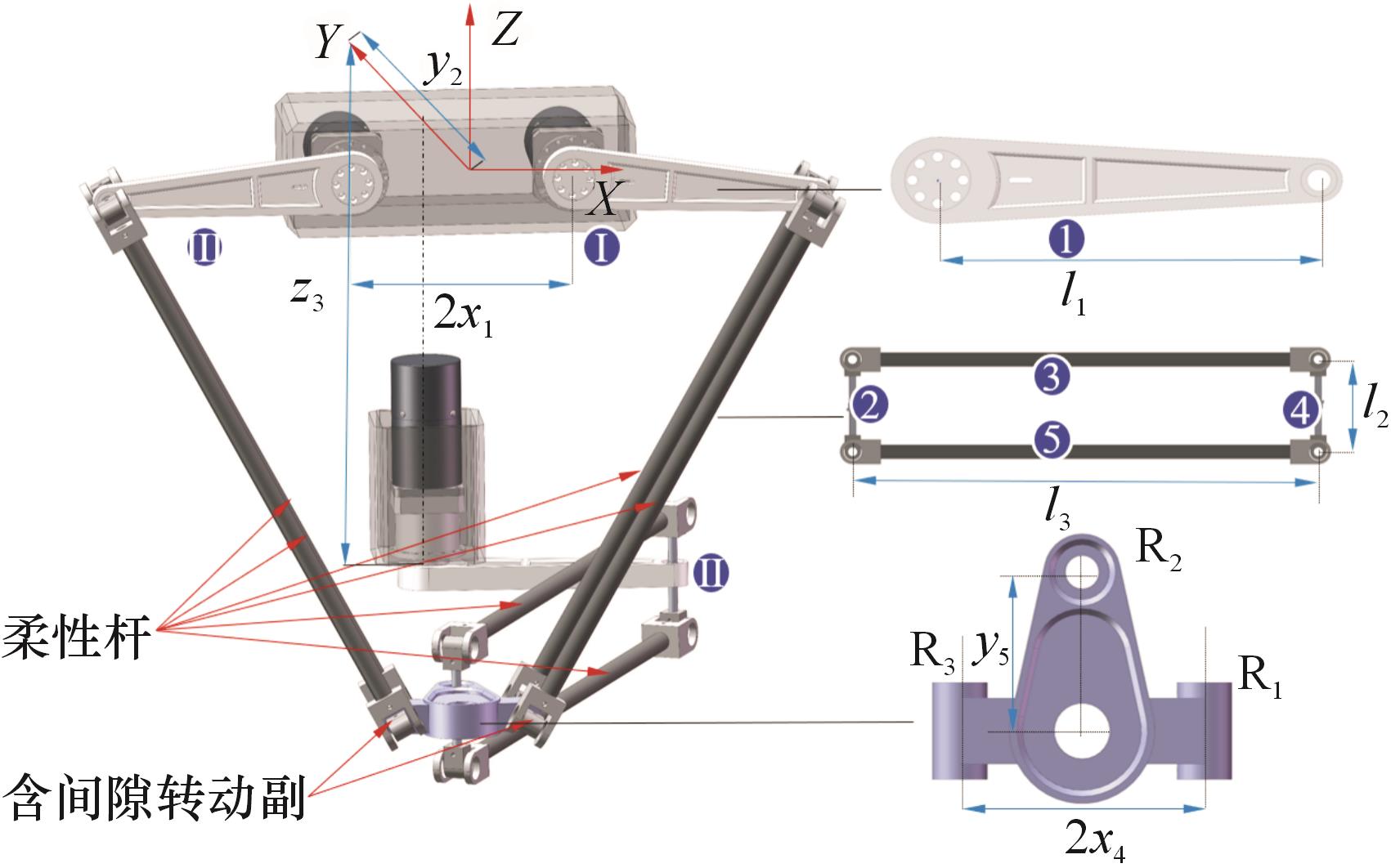
图3 3-RRPaR空间并联机构结构图
Fig.3 Structure diagram of 3-RRPaR spatial parallel mechanism
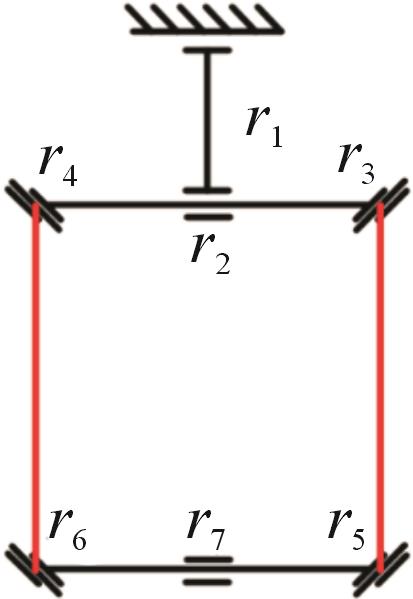
图4 支链1刚柔耦合结构示意图
Fig.4 Branch chain 1 rigid-flexible coupling structure diagram
| 构件 | 参数 | 值 |
|---|---|---|
| 主动臂 | li1长度/mm | 255 |
| Pa支链短杆 | lsh长度/mm | 105 |
| 末端执行器 | x4距离/mm | 60 |
| y5距离/mm | 80 | |
| Pa支链长杆 | ls长度/mm | 640 |
| 机架 | x1距离/mm | 100 |
| y2距离/mm | 720 | |
| z3距离/mm | 600 |
表1 3-RRPaR空间并联机构结构参数
Tab.1 Structural parameters of 3-RRPaR spatial parallel mechanism
| 构件 | 参数 | 值 |
|---|---|---|
| 主动臂 | li1长度/mm | 255 |
| Pa支链短杆 | lsh长度/mm | 105 |
| 末端执行器 | x4距离/mm | 60 |
| y5距离/mm | 80 | |
| Pa支链长杆 | ls长度/mm | 640 |
| 机架 | x1距离/mm | 100 |
| y2距离/mm | 720 | |
| z3距离/mm | 600 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 修正系数 | 5 | 泊松比 | 0.3 |
| 恢复系数 | 0.9 | 滑动摩擦系数cf | 0.05 |
| 轴体半径 | 0.014 | 轴套半径 | 0.015 |
| 弹性模量 | 207 | 极限速度 | 0.0001, 0.000 001 |
表2 含间隙3-RRPaR空间并联机构间隙参数
Tab.2 Gap parameters of 3-RRPaR spatial parallel mechanism with clearance
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 修正系数 | 5 | 泊松比 | 0.3 |
| 恢复系数 | 0.9 | 滑动摩擦系数cf | 0.05 |
| 轴体半径 | 0.014 | 轴套半径 | 0.015 |
| 弹性模量 | 207 | 极限速度 | 0.0001, 0.000 001 |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 从动臂长杆横截面积 | 16×16 | 从动臂长杆弹性模量 | 116 |
| 从动臂长杆密度 | 1700 | 谱半径 | 0.7 |
| 允许误差 | 10-7 | 步长 | 0.001 |
表3 含间隙3-RRPaR空间并联机构柔性构件参数
Tab.3 Flexible component parameters of 3-RRPaR spatial parallel mechanism with clearance
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 从动臂长杆横截面积 | 16×16 | 从动臂长杆弹性模量 | 116 |
| 从动臂长杆密度 | 1700 | 谱半径 | 0.7 |
| 允许误差 | 10-7 | 步长 | 0.001 |
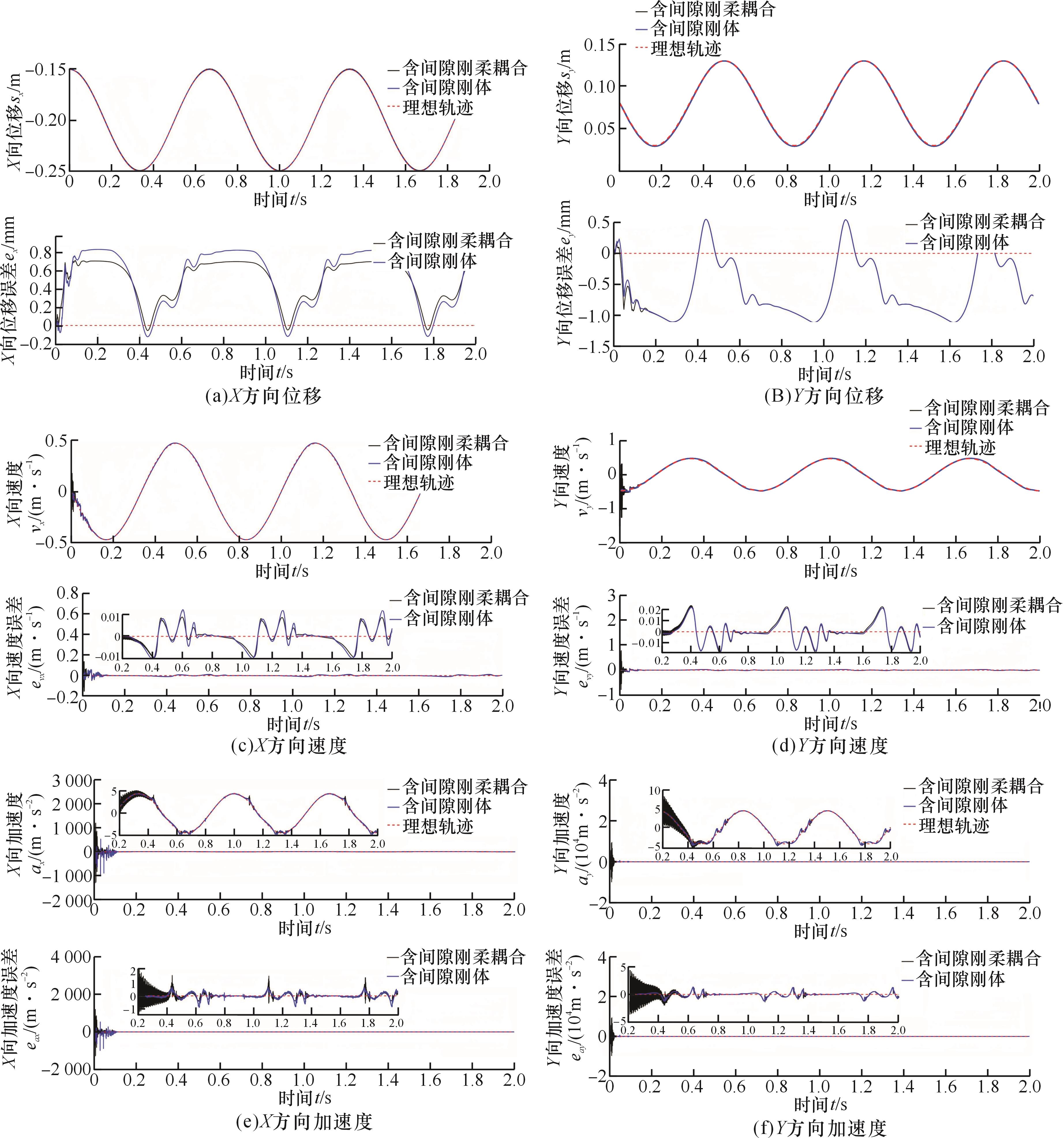
图5 含间隙刚体与含间隙刚柔耦合动力学模型动力学响应对比图(c=0.5 mm)
Fig.5 Comparison of dynamic response of rigid body with clearances and rigid-flexible coupling dynamic model with clearances (c=0.5 mm)
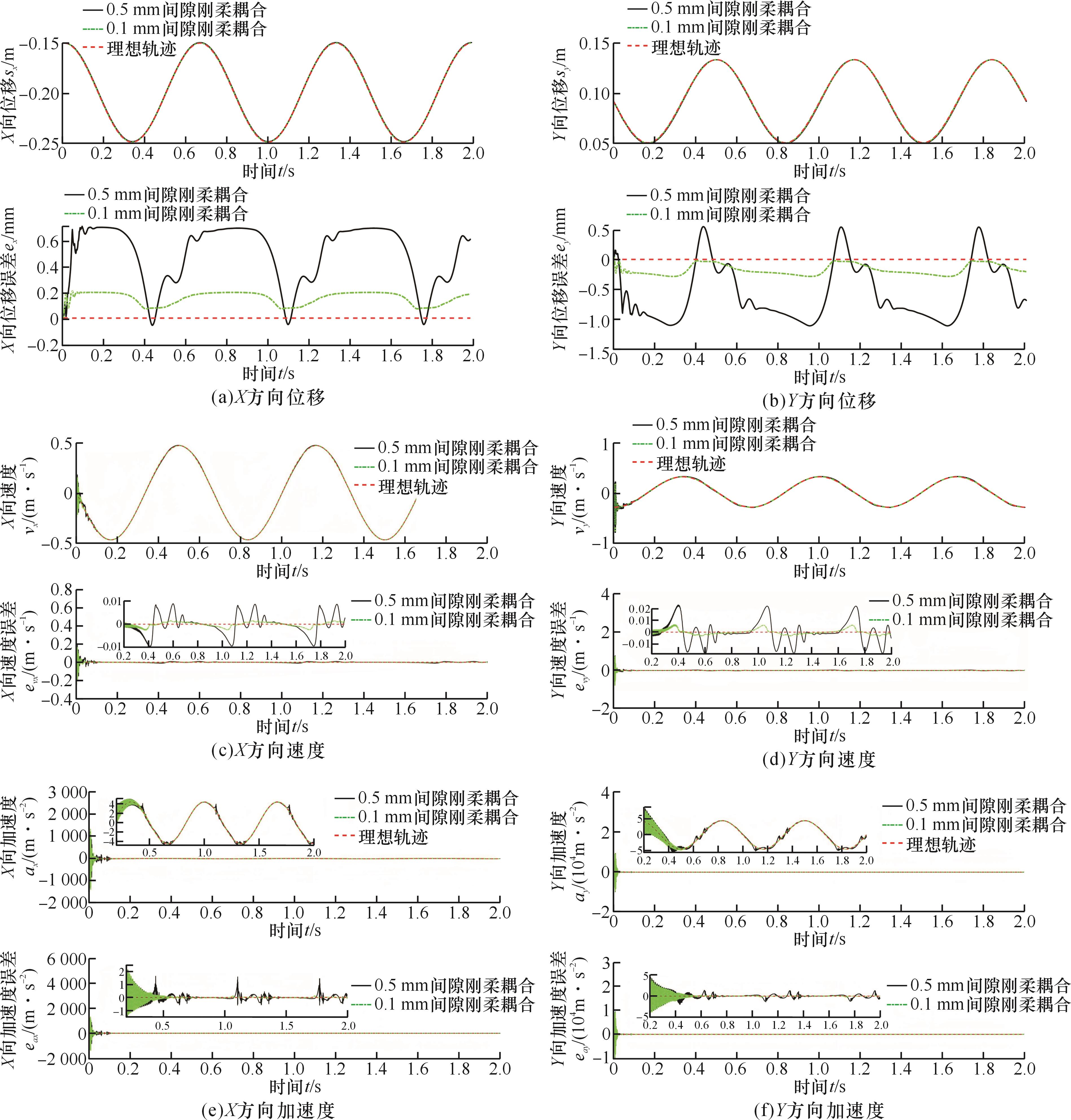
图6 不同间隙下刚柔耦合动力学模型动力学响应对比图 (c1=0.5 mm,c2=0.1 mm)
Fig.6 Comparison of dynamic response of rigid-flexible coupling dynamic model under different clearances (c1=0.5 mm, c2=0.1 mm)
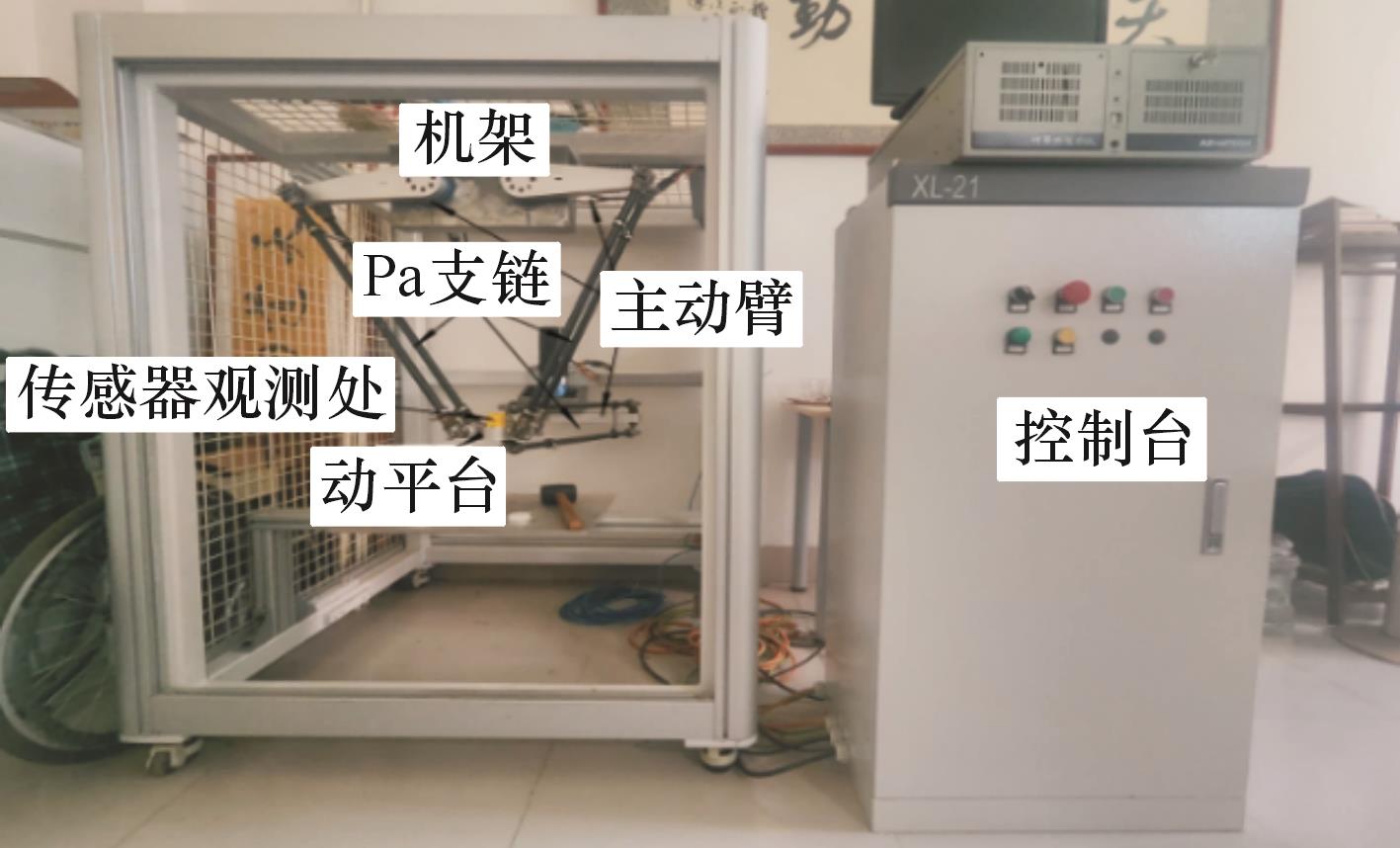
图7 3-RRPaR空间并联机构试验台
Fig.7 3-RRPaR spatial parallel mechanism experimental bench
| 运动副元素 | 内径/mm | 外径/mm | 长度/mm | 材料 |
|---|---|---|---|---|
| 轴套 | 15 | 24 | 50 | 铝合金 |
| 间隙轴销 | 14/14.8 | 98 | 钢 |
表4 含间隙转动副参数
Tab.4 Parameters of revolute joint with clearance
| 运动副元素 | 内径/mm | 外径/mm | 长度/mm | 材料 |
|---|---|---|---|---|
| 轴套 | 15 | 24 | 50 | 铝合金 |
| 间隙轴销 | 14/14.8 | 98 | 钢 |
| 轨迹Ⅰ/m | 轨迹Ⅱ/m |
|---|---|
表5 3-RRPaR空间并联机构试验运动轨迹
Tab.5 The test trajectory of 3-RRPaR spatial parallel mechanism
| 轨迹Ⅰ/m | 轨迹Ⅱ/m |
|---|---|
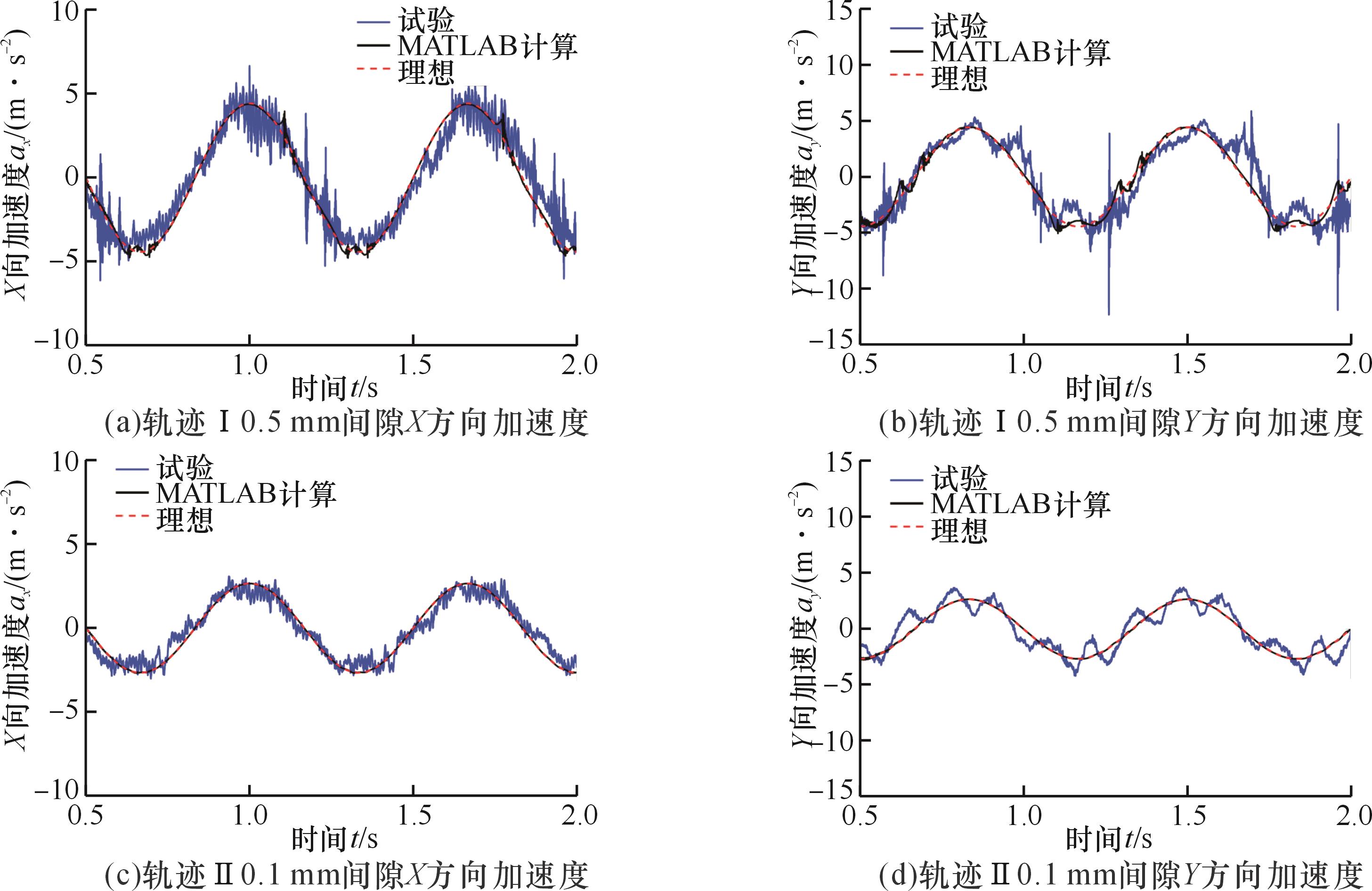
图8 末端执行器加速度响应的试验结果与动力学模型计算结果对比(c1=0.5 mm, c2=0.1 mm)
Fig.8 Comparison of the experimental results of the acceleration response of the end effector with the calculation results of the dynamic model (c1=0.5 mm, c2=0.1 mm)
| [1] | 杜中秋, 沈惠平, 孟庆梅, 等. 运动解耦且正解符号化的8R两平移空间并联机构的设计与性能分析[J]. 中国机械工程, 2023, 34(12): 1425-1435. |
| DU Zhongqiu, SHEN Huiping, MENG Qingmei, et al. Design and Performance Analysis of 8R Two-translational Spatial Parallel Mechanism with Motion Decoupling and Symbolic Positive Solutions[J]. China Mechanical Engineering, 2023, 34(12): 1425-1435. | |
| [2] | 黄宁宁, 尤晶晶, 叶鹏达, 等. 一种运动可解耦的Stewart型并联机构的正运动学及奇异性[J]. 中国机械工程, 2025, 36(9): 1951-1960. |
| HUANG Ningning, YOU Jingjing, YE Pengda, et al. Forward Kinematics and Singularity of Kinematically Decoupled Stewart-type Parallel Mechanisms[J]. China Mechanical Engineering, 2025, 36(9): 1951-1960. | |
| [3] | MARQUES F, ROUPA I, SILVA M T, et al. Examination and Comparison of Different Methods to Model Closed Loop Kinematic Chains Using Lagrangian Formulation with Cut Joint, Clearance Joint Constraint and Elastic Joint Approaches[J]. Mechanism and Machine Theory, 2021, 160: 104294. |
| [4] | FLORES P, AMBRÓSIO J, LANKARANI H M. Contact-impact Events with Friction in Multibody Dynamics: Back to Basics[J]. Mechanism and Machine Theory, 2023, 184: 105305. |
| [5] | 商德勇, 黄云山, 黄欣怡, 等. 基于奇异摄动的刚柔耦合Delta机器人非线性混合控制[J]. 机械工程学报, 2024, 60(5): 95-106. |
| SHANG Deyong, HUANG Yunshan, HUANG Xinyi, et al. Nonlinear Hybrid Control of Rigid Flexible Coupling Delta Robot Based on Singular Perturbation[J]. Journal of Mechanical Engineering, 2024, 60(5): 95-106. | |
| [6] | 商德勇, 黄欣怡, 黄云山, 等. 基于Kane方程的Delta并联机器人刚柔耦合动力学研究[J]. 机械工程学报, 2024, 60(7): 124-133. |
| SHANG Deyong, HUANG Xinyi, HUANG Yunshan, et al. Research on Rigid-Flexible Coupling Dynamics of Delta Parallel Robot Based on Kane Equation[J]. Journal of Mechanical Engineering, 2024, 60(7): 124-133. | |
| [7] | JAVANFAR A, BAMDAD M. Effect of Novel Continuous Friction Model on Nonlinear Dynamics of the Mechanisms with Clearance Joint[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 236(11): 6040-6052. |
| [8] | BAI Zhengfeng, LIU Tianxi, LI Jinyu, et al. Numerical and Experimental Study on Dynamic Characteristics of Planar Mechanism with Mixed Clearances[J]. Mechanics Based Design of Structures and Machines, 2023, 51(11): 6142-6165. |
| [9] | CHEN Xiulong, WANG Tao. Dynamic Behavior Analysis of Rigid-Flexible Coupling Planar Mechanism Considering Dry Clearances and Lubrication Clearances[J]. Journal of Mechanical Science and Technology, 2023, 37(4): 1585-1600. |
| [10] | JING Qian, LIU Hongzhao. Dynamics and Wear Prediction of Mechanisms Considering Multiple Clearances and Coatings[J]. Lubricants, 2023, 11(7): 310. |
| [11] | 陈国强, 周红鹏, 黄俊杰, 等. 考虑关节摩擦的3-PRS并联机构动力学建模研究[J]. 农业机械学报, 2021, 52(8): 416-426. |
| CHEN Guoqiang, ZHOU Hongpeng, HUANG Junjie, et al. Dynamic Modeling with Joint Friction of 3-PRS Parallel Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(8): 416-426. | |
| [12] | WANG Xiaoyu, WANG Haofeng, ZHAO Jingchao, et al. Rigid-Flexible Coupling Dynamics Modeling of Spatial Crank-Slider Mechanism Based on Absolute Node Coordinate Formulation[J]. Mathematics, 2022, 10(6): 881. |
| [13] | 刘凉, 汪博深, 冯建峰, 等. 含柔性动平台并联机器人动力学建模方法研究[J]. 农业机械学报, 2023, 54(12): 417-430. |
| LIU Liang, WANG Boshen, FENG Jianfeng, et al. Dynamic Modeling Method of Parallel Robot with Flexible Moving Platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(12): 417-430. | |
| [14] | GUO Feng, CHENG Gang, WANG Shilin, et al. Rigid–Flexible Coupling Dynamics Analysis with Joint Clearance for a 5-DOF Hybrid Polishing Robot[J]. Robotica, 2022, 40(7): 2168-2188. |
| [15] | 金国光, 王志敏, 畅博彦, 等. 含间隙变胞机构动力学建模与平稳性分析[J]. 机械工程学报, 2024, 60(21): 144-155. |
| JIN Guoguang, WANG Zhimin, CHANG Boyan, et al. Dynamic Modeling and Stationarity Analysis of Metamorphic Mechanism with Clearance Joint[J]. Journal of Mechanical Engineering, 2024, 60(21): 144-155. | |
| [16] | WU Xuze, SUN Yu, WANG Yu, et al. Correlation Dimension and Bifurcation Analysis for the Planar Slider-crank Mechanism with Multiple Clearance Joints[J]. Multibody System Dynamics, 2021, 52(1): 95-116. |
| [17] | 吴懋琦, 谭述君, 高飞雄. 基于绝对节点坐标法的平面梁有限变形下变形重构[J]. 力学学报, 2021, 53(10): 2776-2789. |
| WU Maoqi, TAN Shujun, GAO Feixiong. Shape Reconstruction of Plane Beam with Finite Deformation Based on Absolute Nodal Coordinate Formulation[J]. Chinese Journal of Theoretical and Applied Mechanics, 2021, 53(10): 2776-2789. | |
| [18] | XING Yu, LIU Lei, LIU Chao, et al. Mechanical Deformation Analysis of a Flexible Finger in Terms of an Improved ANCF Plate Element[J]. Machines, 2022, 10(7): 518. |
| [1] | 李成展, 郭鹏程, 徐从昌, 李落星, 肖永富, 蒋淑霞. 车门限位多自由度激励的刚柔耦合识别及关门窗框抖动优化[J]. 中国机械工程, 2025, 36(11): 2792-2800. |
| [2] | 张志刚1, 靳勇利1, 王栋银1, 付志军1, 秦国栋2. 基于动力学降噪模型的蛇形臂机器人末端轨迹跟随算法[J]. 中国机械工程, 2025, 36(03): 407-413. |
| [3] | 陈修龙, 王爱郭, 王景庆. 含转动副润滑间隙的多连杆机构动力学优化设计[J]. 中国机械工程, 2025, 36(01): 87-95. |
| [4] | 孙茂凱, 王生海, 韩广冬, 陈海泉, 孙玉清. 船用起重机多柔索减摇系统的动力学分析与工程应用[J]. 中国机械工程, 2024, 35(07): 1308-1317. |
| [5] | 刘延浩, 倪冰雨, 田万一, 姜潮. 区间过程激励下刚柔耦合系统动态不确定性分析的序列模拟方法[J]. 中国机械工程, 2024, 35(05): 770-783. |
| [6] | 周松, 陈宇, 董红亮, 高翔, 申娟, 周佳, 万鑫铭. 一种新型商用车驾驶室多轴道路虚拟试验研究[J]. 中国机械工程, 2023, 34(10): 1241-1250. |
| [7] | 孙静, 韩雪艳, 魏元浩, 陈爽, 李仕华, . 考虑时变间隙的并联指向机构非线性模态分析[J]. 中国机械工程, 2021, 32(14): 1700-1708,1715. |
| [8] | 王成志, 王云超. 含运动副间隙的空间转向机构运动精度分析及优化设计#br#[J]. 中国机械工程, 2021, 32(09): 1027-1034,1042. |
| [9] | 张陈曦, 赵又群, 冯世林, 郑鑫, 徐瀚. 伪刚体柔体耦合的新式免充气轮胎刚度分析[J]. 中国机械工程, 2021, 32(09): 1051-1060,1072. |
| [10] | 谭飏1;张宇2;刘丽冰1;杨泽青1. 面向动力学特性监测的主轴系统数字孪生体[J]. 中国机械工程, 2020, 31(18): 2231-2238,2246. |
| [11] | 王昆鹏1,2;肖晓华1,2;朱海燕1,2;曾杰1,2. 柔性牵引器刚柔耦合动力学特征及结构优化[J]. 中国机械工程, 2020, 31(08): 915-923,930. |
| [12] | 孔骏成;李菊;沈惠平. 2-RPaRSS并联操作手运动副间隙误差分析及补偿[J]. 中国机械工程, 2020, 31(06): 706-713. |
| [13] | 刘俊1;张海剑1;王威1;刘亚军1;周福庚2. 基于轮胎六分力的某商用车车架疲劳分析[J]. 中国机械工程, 2019, 30(21): 2583-2589. |
| [14] | 刘俊1;刘亚军1;张少辉1;杨建森2;董强强2. 基于虚拟迭代及有限元理论的某中型货车驾驶室疲劳寿命研究[J]. 中国机械工程, 2018, 29(13): 1588-1595. |
| [15] | 赵燕;阮成明;王松伟. 刚柔耦合柔性机械手二阶理论精准建模及实验研究[J]. 中国机械工程, 2018, 29(02): 205-210. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||