


ISSN 1004-132X
CN 42-1294/TH
CN 42-1294/TH
中国机械工程 ›› 2025, Vol. 36 ›› Issue (11): 2783-2791.DOI: 10.3969/j.issn.1004-132X.2025.11.037
吴洪臣( ), 陈晓荣(), 李柏杨
), 陈晓荣(), 李柏杨
收稿日期:2024-07-16
出版日期:2025-11-25
发布日期:2025-12-09
通讯作者:
陈晓荣
作者简介:吴洪臣,男,2001年生,硕士研究生。研究方向为图像处理与机器视觉。E-mail:wuhongchen3@163.com基金资助:
Hongchen WU(), Xiaorong CHEN(), Baiyang LI
Received:2024-07-16
Online:2025-11-25
Published:2025-12-09
Contact:
Xiaorong CHEN
摘要:
针对传统检测手段难以深入工件内部进行三维量化分析的问题,提出一种基于多线程半全局立体匹配(M-SGSM)的双目视觉检测方法。首先采用张正友标定法获取双目内窥镜参数,并对图像进行畸变矫正与极线矫正;然后设计多线程区域叠加分割策略优化立体匹配算法,提高视差图计算效率,生成三维彩色点云;最后,提出自标定面积测量法结合欧氏空间距离计算实现三维量化分析。实验结果表明,优化后立体匹配算法计算效率提高约30%,所提检测方法生成的三维点云结构清晰,欧氏距离测量误差小于3%,面积测量误差小于1.5%。该方法为工件内部三维检测提供了高效高精解决方案。
中图分类号:
吴洪臣, 陈晓荣, 李柏杨. 多线程半全局立体匹配工件内部检测方法[J]. 中国机械工程, 2025, 36(11): 2783-2791.
Hongchen WU, Xiaorong CHEN, Baiyang LI. Multi-threaded Semi-global Stereo Matching Method for Internal Inspection of Workpieces[J]. China Mechanical Engineering, 2025, 36(11): 2783-2791.
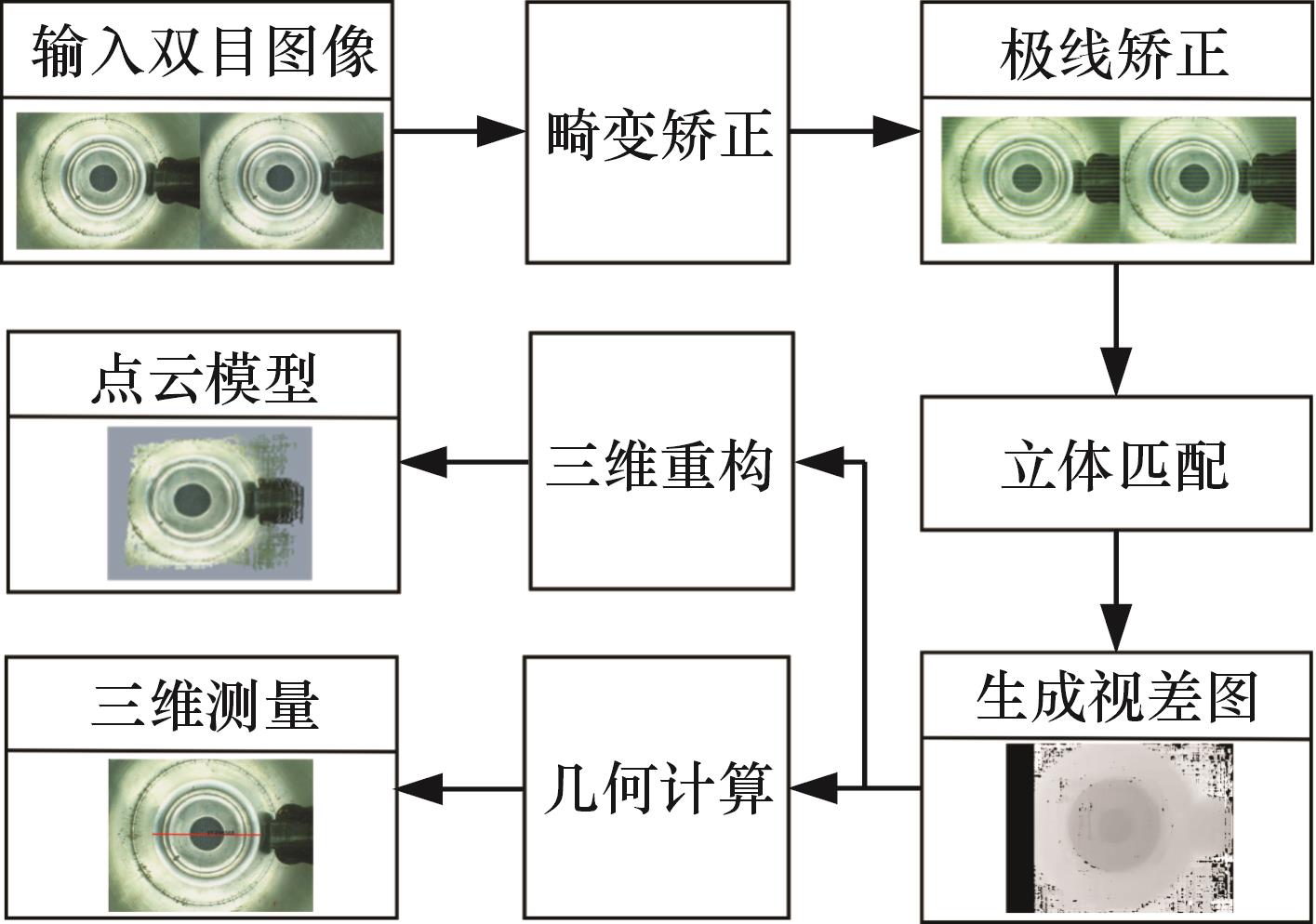
图1 三维重建与测量流程
Fig.1 3D reconstruction and measurement process
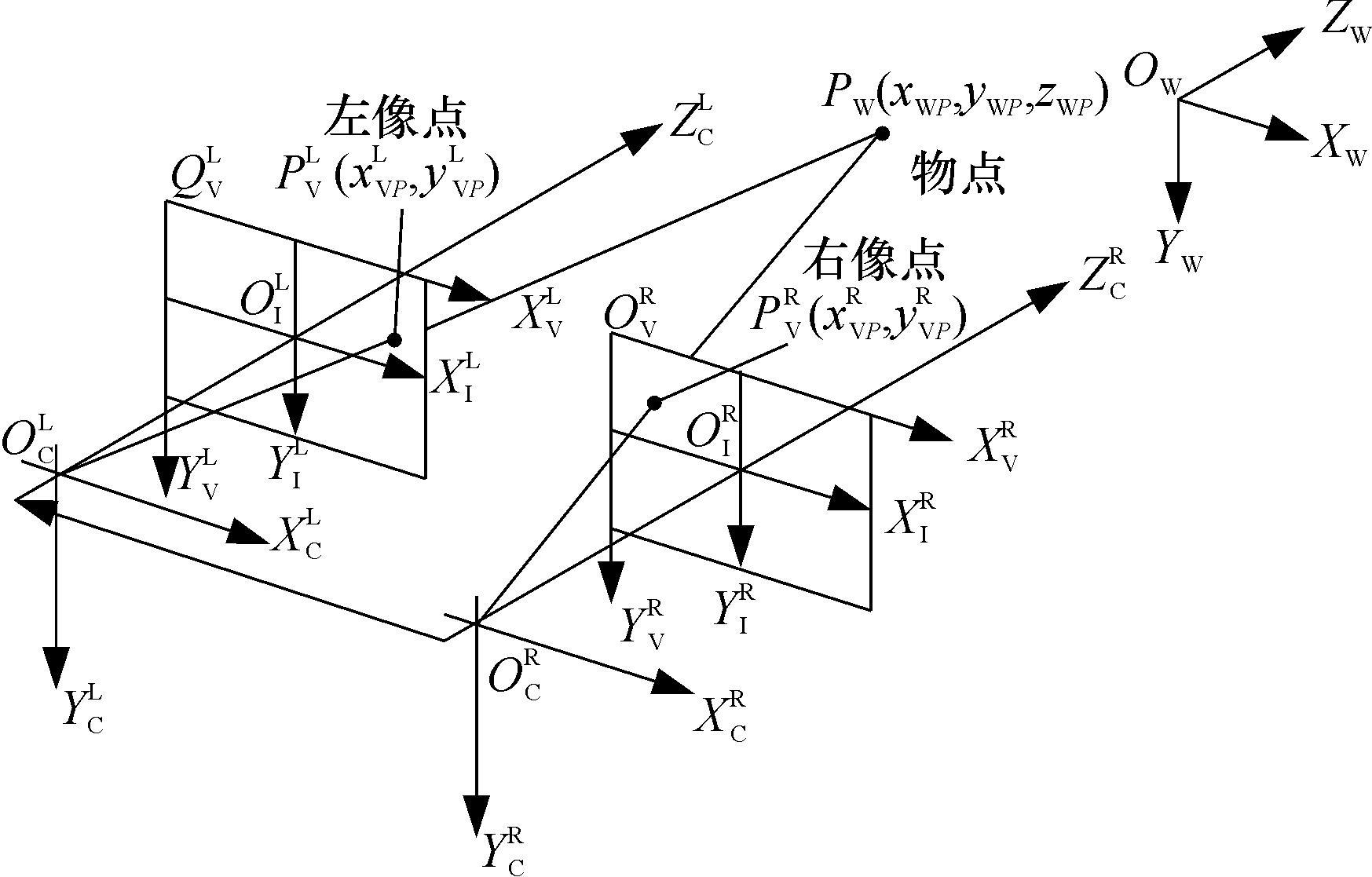
图2 双目视觉系统
Fig.2 Binocular vision system
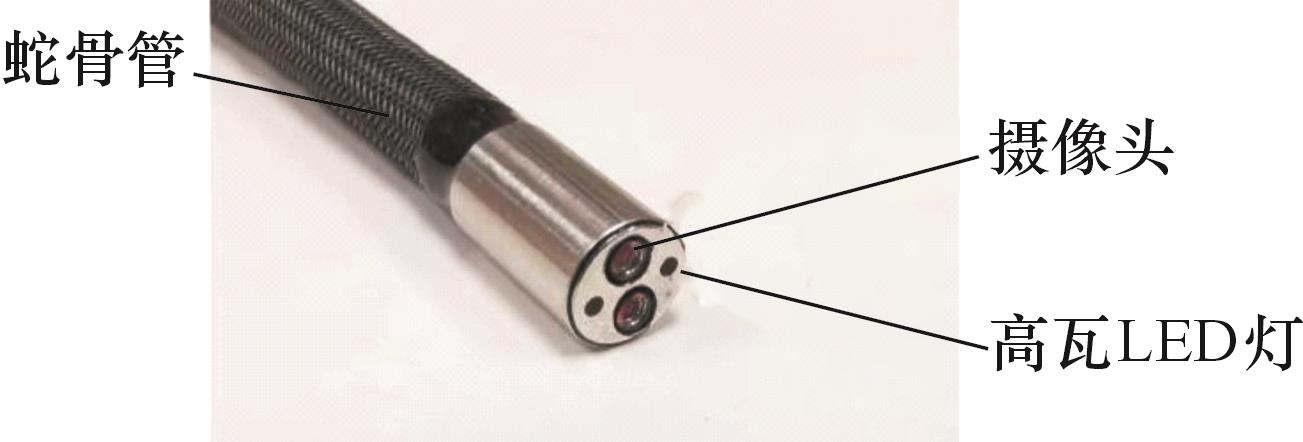
图3 OV9734双目内窥镜
Fig.3 OV9734 binocular endoscope module

图4 双目标定采集图片
Fig.4 Binocular calibration collection images
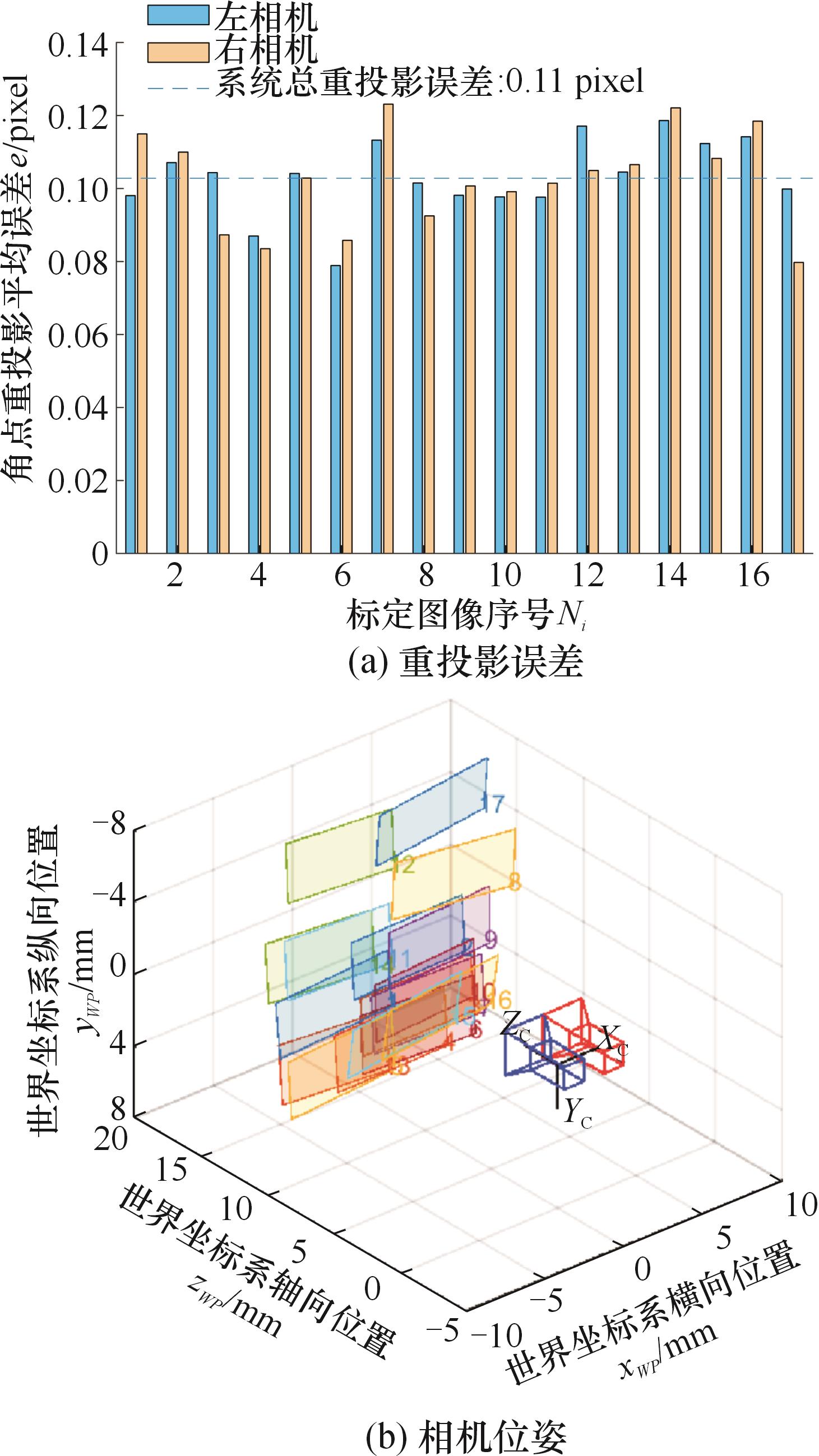
图5 标定结果
Fig.5 Calibration results
| 参数 | 左相机 | 右相机 |
|---|---|---|
| 内参矩阵 | ||
| 旋转矩阵 | ||
| 平移矩阵 | ||
| 畸变系数 | k1=0.087 | k1=0.068 |
| k2=-0.269 | k2=-0.198 | |
| k3=0.146 | k3=0.080 | |
| p1=0.000 093 | p1=0.000 249 | |
| p2=-0.000 984 | p2=-0.001 224 | |
表1 左右相机内外参数与畸变系数
Tab.1 Left and right camera internal and external parameters and distortion coefficients
| 参数 | 左相机 | 右相机 |
|---|---|---|
| 内参矩阵 | ||
| 旋转矩阵 | ||
| 平移矩阵 | ||
| 畸变系数 | k1=0.087 | k1=0.068 |
| k2=-0.269 | k2=-0.198 | |
| k3=0.146 | k3=0.080 | |
| p1=0.000 093 | p1=0.000 249 | |
| p2=-0.000 984 | p2=-0.001 224 | |
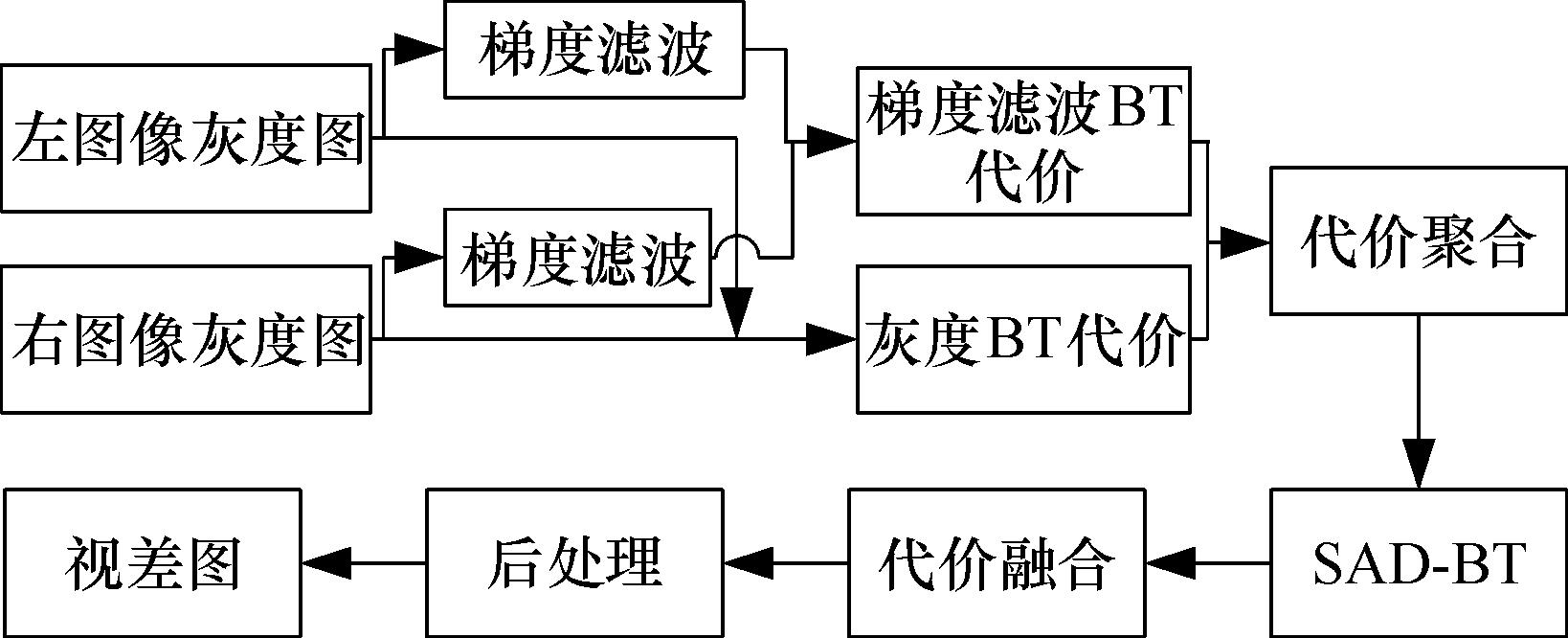
图6 SGBM算法流程
Fig.6 SGBM algorithm process
| 名称 | 配置信息 |
|---|---|
| 操作系统 | Windows 11 64位 |
| 编程语言 | C++ 11 |
| 编译器 | Microsoft Visual Studio 2017 |
| CPU | Intel Core i7-13700H |
| GPU | NVIDA RTX 4060 Laptop (8G) |
表2 实验环境
Table.2 Experimental environment
| 名称 | 配置信息 |
|---|---|
| 操作系统 | Windows 11 64位 |
| 编程语言 | C++ 11 |
| 编译器 | Microsoft Visual Studio 2017 |
| CPU | Intel Core i7-13700H |
| GPU | NVIDA RTX 4060 Laptop (8G) |
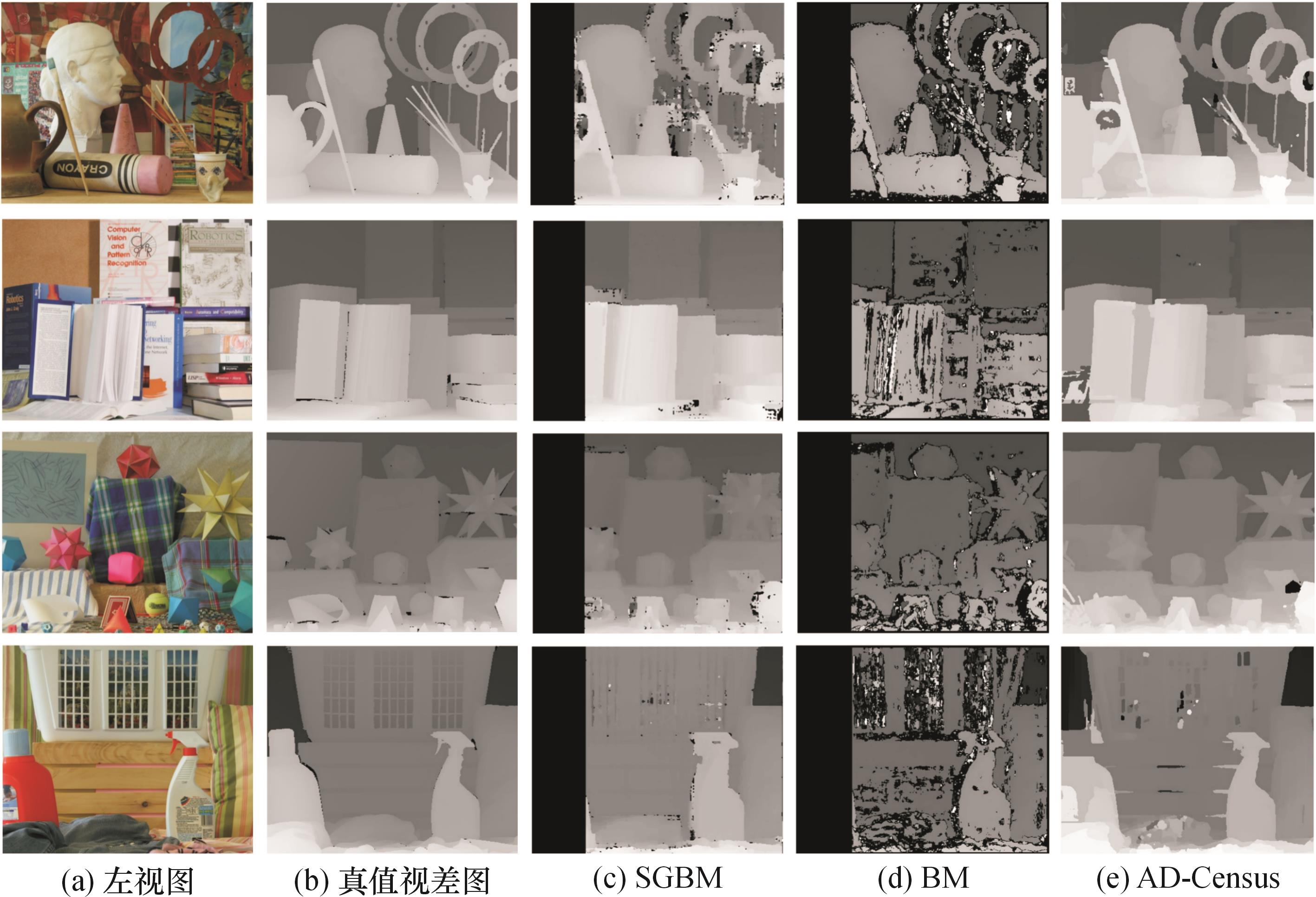
图7 匹配结果
Fig.7 Matching results
| 测试对象 | SSIM | PSNR/dB | 计算时间t/ms | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SGBM | BM | AD-Census | SGBM | BM | AD-Census | SGBM | BM | AD-Census | |
| Art | 0.537 | 0.324 | 0.826 | 11.423 | 8.697 | 19.936 | 40.085 | 3.083 | 2844 |
| Books | 0.687 | 0.364 | 0.891 | 11.571 | 9.330 | 21.118 | 39.667 | 2.980 | 2900 |
| Moebius | 0.660 | 0.415 | 0.882 | 13.284 | 10.552 | 20.696 | 38.869 | 3.986 | 2788 |
| Laundry | 0.647 | 0.281 | 0.823 | 11.247 | 8.917 | 21.618 | 37.542 | 5.233 | 2660 |
表3 SGBM、BM、AD-Census在MiddleBurry数据集上的对比
Tab.3 Comparison of SGBM, BM, AD-Census on the MiddleBurry dataset
| 测试对象 | SSIM | PSNR/dB | 计算时间t/ms | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SGBM | BM | AD-Census | SGBM | BM | AD-Census | SGBM | BM | AD-Census | |
| Art | 0.537 | 0.324 | 0.826 | 11.423 | 8.697 | 19.936 | 40.085 | 3.083 | 2844 |
| Books | 0.687 | 0.364 | 0.891 | 11.571 | 9.330 | 21.118 | 39.667 | 2.980 | 2900 |
| Moebius | 0.660 | 0.415 | 0.882 | 13.284 | 10.552 | 20.696 | 38.869 | 3.986 | 2788 |
| Laundry | 0.647 | 0.281 | 0.823 | 11.247 | 8.917 | 21.618 | 37.542 | 5.233 | 2660 |
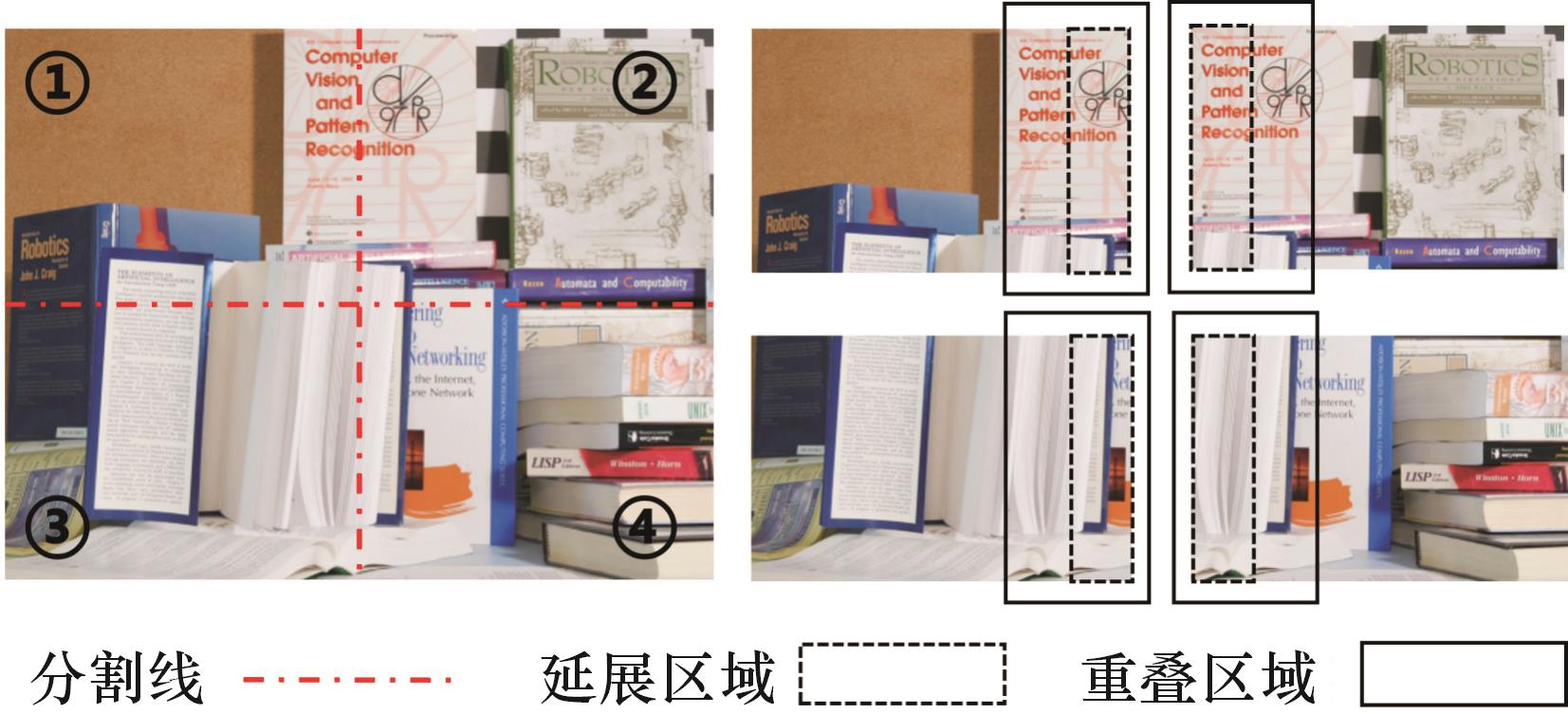
图8 分割策略
Fig.8 Segmentation strategy
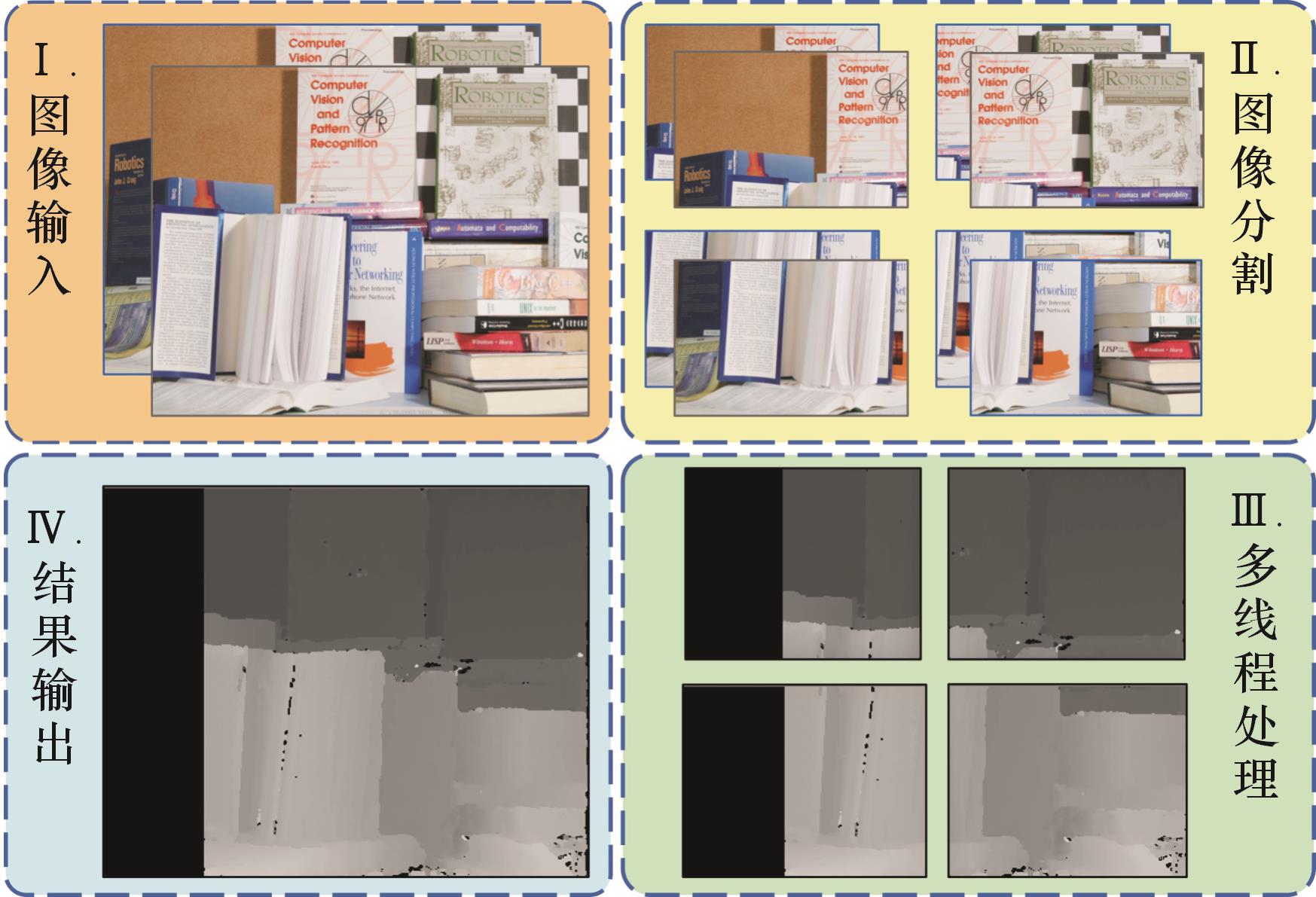
图9 多线程算法实现流程
Fig.9 Multi-threaded algorithm implementation process
测试 对象 | 时间/ms | |||
|---|---|---|---|---|
| SGBM | BM | AD-Census | M-SGSM | |
| Art | 40.085 | 3.083 | 2844 | 23.436 |
| Books | 39.667 | 2.980 | 2900 | 28.084 |
| Moebius | 38.869 | 3.986 | 2788 | 22.235 |
| Laundry | 37.542 | 5.233 | 2660 | 22.797 |
表4 各算法在时间上的对比
Tab.4 Comparison of each algorithm in time
测试 对象 | 时间/ms | |||
|---|---|---|---|---|
| SGBM | BM | AD-Census | M-SGSM | |
| Art | 40.085 | 3.083 | 2844 | 23.436 |
| Books | 39.667 | 2.980 | 2900 | 28.084 |
| Moebius | 38.869 | 3.986 | 2788 | 22.235 |
| Laundry | 37.542 | 5.233 | 2660 | 22.797 |
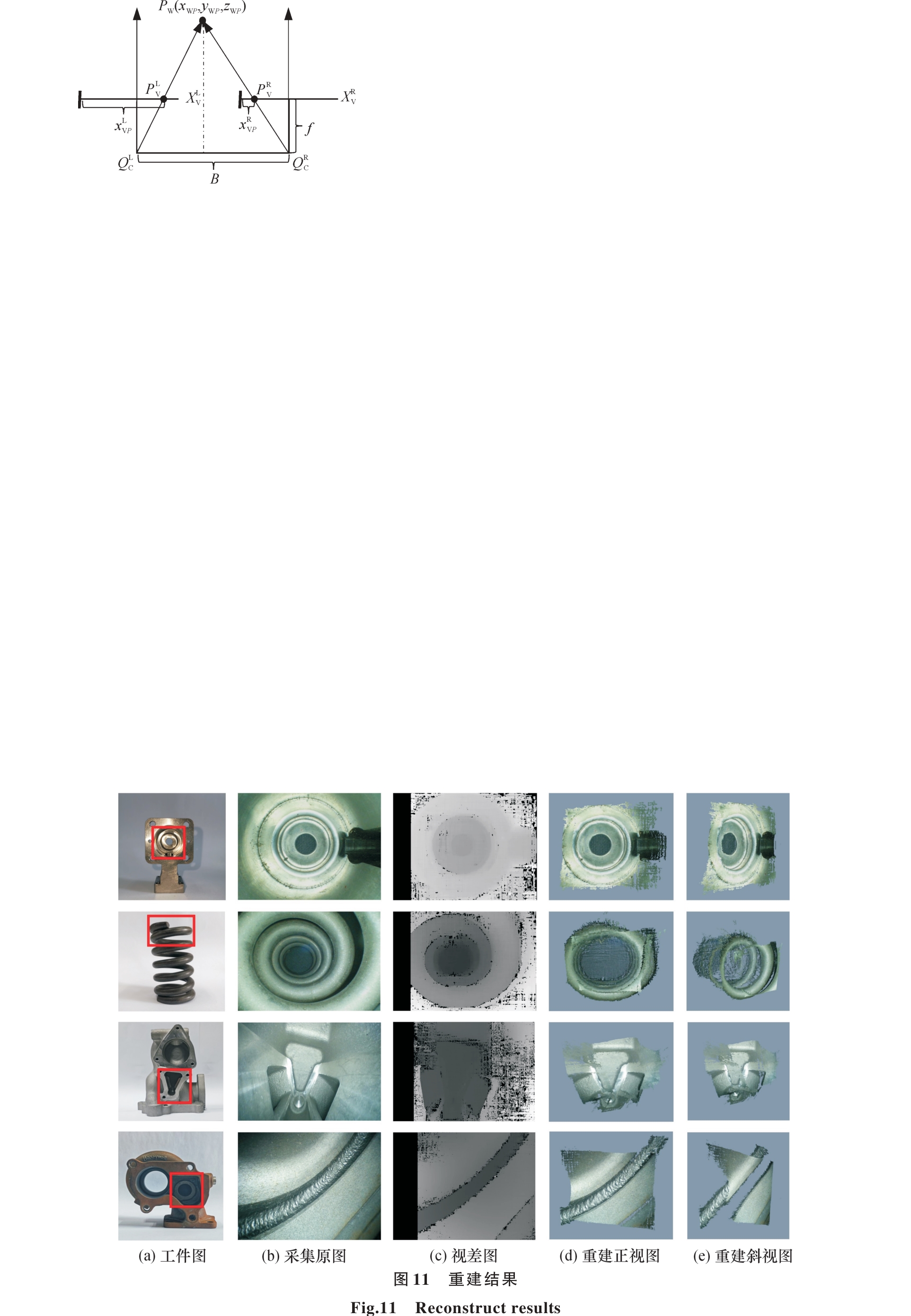
图10 结构示意
Fig.10 Structure schematic
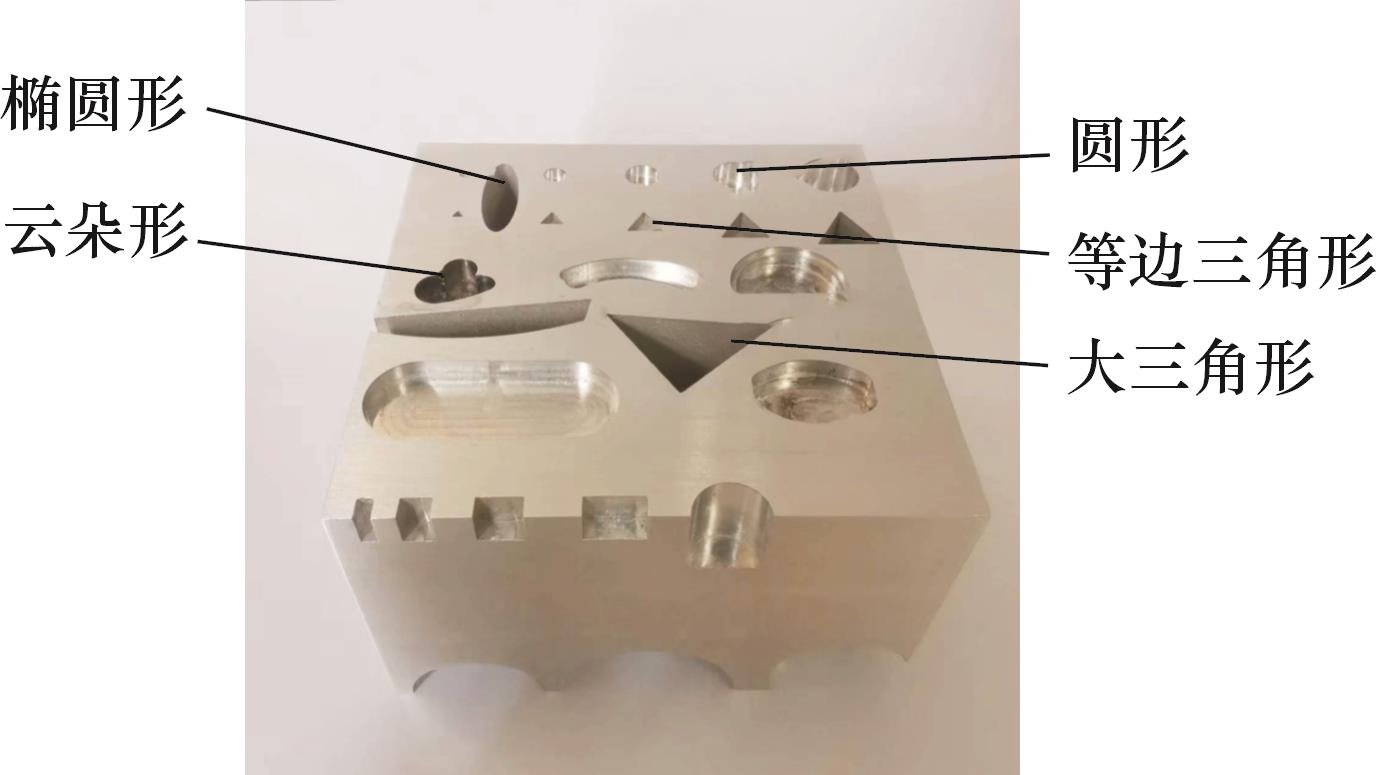
图12 金属工件
Fig.12 Metal workpiece
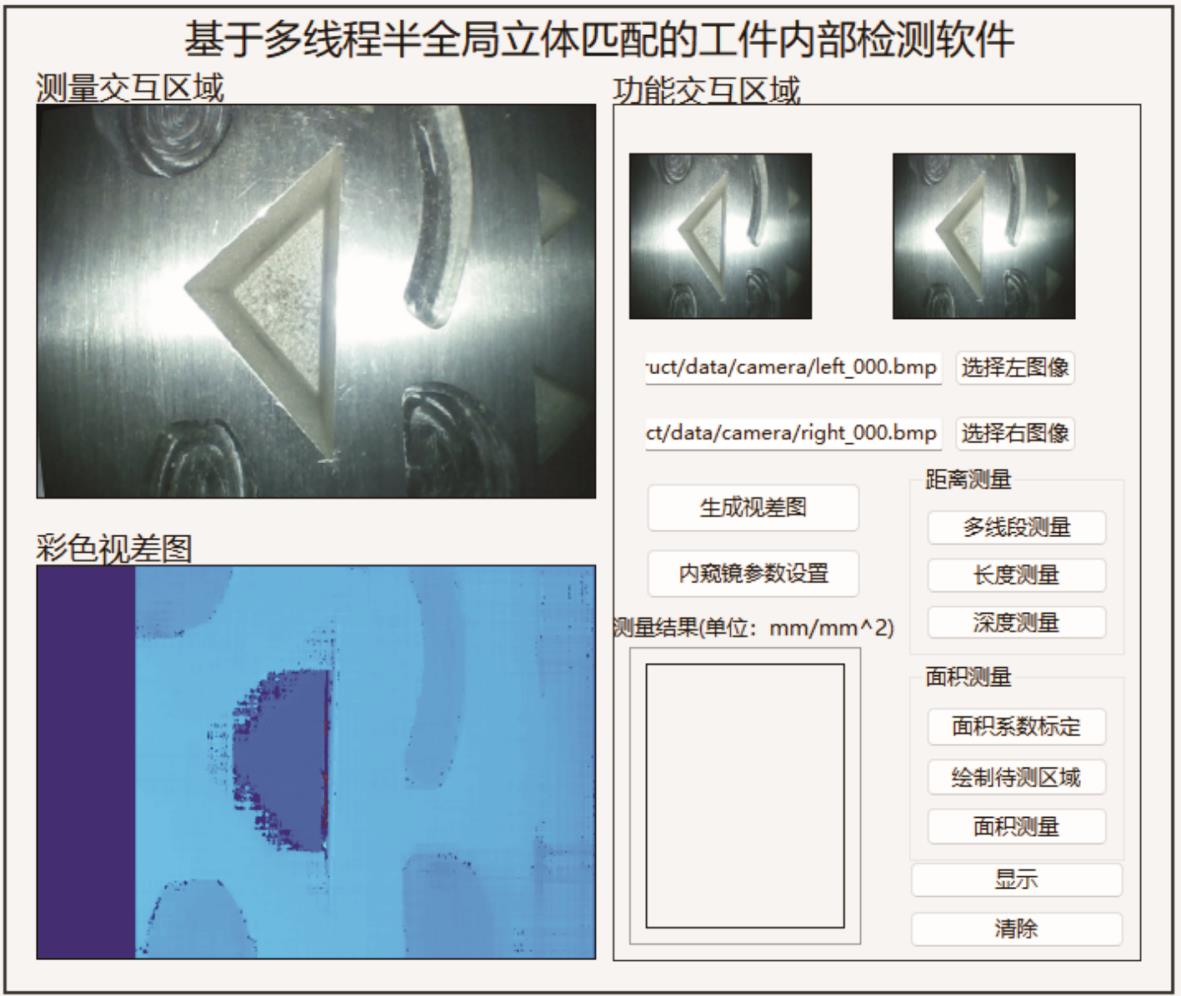
图13 上位机软件
Fig.13 PC Software
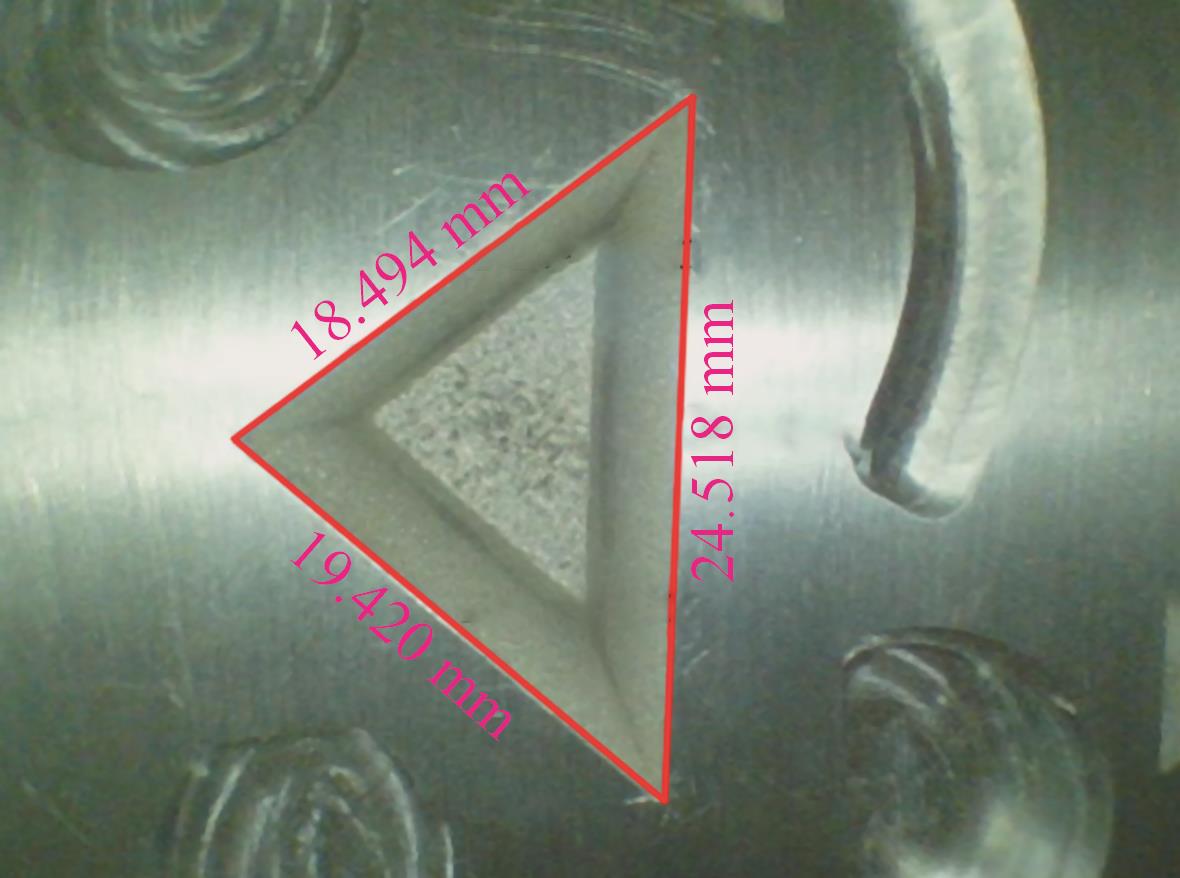
图14 长度测量示意图
Fig.14 Length measurement
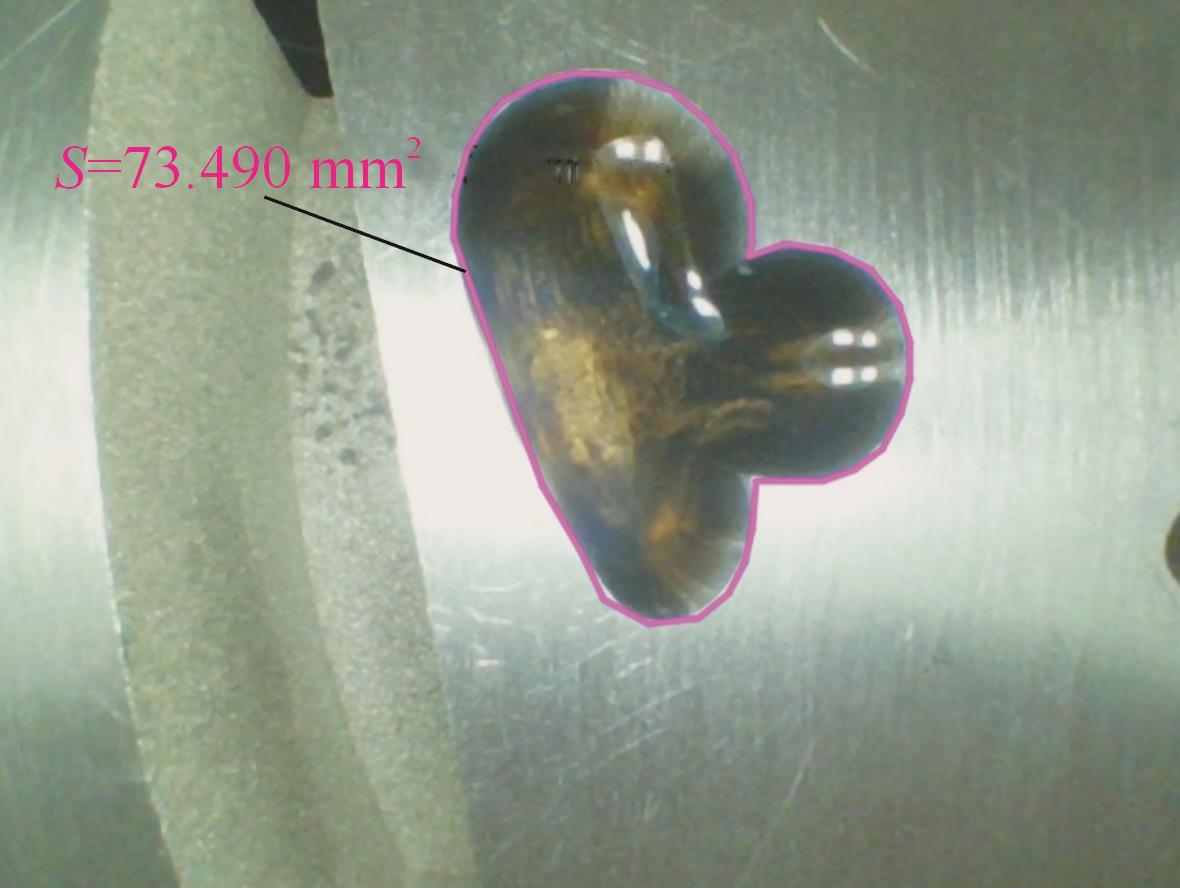
图15 面积测量
Fig.15 Area measurement
| 测量类型 | 测量对象 | 实际值 | 测量结果 | 平均相对 误差/% | ||||
|---|---|---|---|---|---|---|---|---|
| 测量1 | 测量2 | 测量3 | 测量4 | 测量5 | ||||
| 长度测量/mm | 等边三角形边长 | 6.000 | 5.766 | 5.958 | 5.753 | 5.833 | 5.996 | 2.373 |
| 圆直径 | 8.000 | 7.917 | 7.910 | 7.876 | 7.923 | 7.916 | 1.145 | |
| 大三角长边 | 24.469 | 23.875 | 24.063 | 24.107 | 24.333 | 24.134 | 1.498 | |
| 大三角中边 | 19.256 | 18.784 | 18.758 | 18.763 | 18.793 | 19.200 | 2.058 | |
| 大三角短边 | 18.655 | 18.588 | 18.484 | 18.347 | 18.352 | 18.310 | 1.280 | |
| 面积测量/mm2 | 椭圆形 | 89.512 | 90.276 | 90.022 | 91.309 | 91.045 | 90.374 | 1.221 |
| 云朵形 | 76.751 | 75.771 | 75.468 | 76.235 | 78.605 | 77.032 | 1.281 | |
表5 三维测量结果
Tab.5 3D measurement results
| 测量类型 | 测量对象 | 实际值 | 测量结果 | 平均相对 误差/% | ||||
|---|---|---|---|---|---|---|---|---|
| 测量1 | 测量2 | 测量3 | 测量4 | 测量5 | ||||
| 长度测量/mm | 等边三角形边长 | 6.000 | 5.766 | 5.958 | 5.753 | 5.833 | 5.996 | 2.373 |
| 圆直径 | 8.000 | 7.917 | 7.910 | 7.876 | 7.923 | 7.916 | 1.145 | |
| 大三角长边 | 24.469 | 23.875 | 24.063 | 24.107 | 24.333 | 24.134 | 1.498 | |
| 大三角中边 | 19.256 | 18.784 | 18.758 | 18.763 | 18.793 | 19.200 | 2.058 | |
| 大三角短边 | 18.655 | 18.588 | 18.484 | 18.347 | 18.352 | 18.310 | 1.280 | |
| 面积测量/mm2 | 椭圆形 | 89.512 | 90.276 | 90.022 | 91.309 | 91.045 | 90.374 | 1.221 |
| 云朵形 | 76.751 | 75.771 | 75.468 | 76.235 | 78.605 | 77.032 | 1.281 | |
| [1] | 何宝凤, 丁思源, 魏翠娥, 等. 三维表面粗糙度测量方法综述[J]. 光学精密工程, 2019, 27(1): 78-93. |
| HE Baofeng, DING Siyuan, WEI Cuie, et al. Review of Measurement Methods for Areal Surface Roughness[J]. Optics and Precision Engineering, 2019, 27(1): 78-93. | |
| [2] | 那一鸣, 胡超, 邱业余, 等. 基于机器视觉的汽车车门三维定位引导 [J]. 中国机械工程, 2024, 35(9): 1677-1687. |
| NA Yiming, HU Chao, QIU Yeyu, et al. Three-dimensional Positioning Guidance of Automobile Doors Based on Machine Vision[J]. China Mechanical Engineering, 2024, 35(9): 1677-1687. | |
| [3] | 易怀安,赵欣佳,唐乐,等.基于彩色图像奇异值熵指标的磨削表面粗糙度视觉测量方法[J].中国机械工程,2021,32(13):1577-1583. |
| YI Huaian, ZHAO Xinjia, TANG Le, et al. Vision Mearsurement Method for Ground Surface Roughness Based on Color Image Singular Value Entropy Index [J]. China Mechanical Engineering, 2021, 32(13): 1577-1583. | |
| [4] | 曹旭明, 冯浩, 曹利钢, 等. 基于机器视觉螺栓类零件参数在线质检系统 [J]. 控制工程, 2021, 28(6): 1187-1194. |
| CAO Xuming, FENG Hao, CAO Ligang, et al. Online Quality Inspection System for Bolt Parts Parameters Based on Machine Vision [J]. Control Engineering of China, 2021, 28(6): 1187-1194. | |
| [5] | 马大智, 于斌超, 张彦泽, 等. 基于双目视觉的大型高反光构件测量系统 [J]. 应用光学, 2021, 42(4): 577-585. |
| MA Dazhi, YU Binchao, ZHANG Yanze, et al. Measurement System for Large-scale High Reflective Component Based on Binocular Vision[J]. Journal of Applied Optics, 2021, 42(4): 577-585. | |
| [6] | HughesBaker.Remote Visual Inspection[EB/OL].Houston: Baker Hughes,2024[2025-06-11].. |
| [7] | SCHÖLLY FIBEROPTIC GMBH.FLEXIVISO@100 INSPECTIONS[EB/OL].Freiburg:SCHÖLLY, 2022[2025-06-11].. |
| [8] | Olympus.IPLEX NX Olympus's Most Advanced Industrial Videoscope[EB/OL].Tokyo:Olympus,2016[2025-06-11].. |
| [9] | 周富强, 王晔昕, 柴兴华, 等. 镜像双目视觉精密测量技术综述 [J]. 光学学报, 2018, 38(8): 59-67. |
| ZHOU Fuqiang, WANG Yexin, CHAI Xinghua, et al. Review on Precise Measurement Technology Based on Mirror Binocular Vision [J]. Acta Optica Sinica, 2018, 38(8): 59-67. | |
| [10] | FIRMANSYAH I, YAMAGUCHI Y, TMARU-YAMA, et al. FPGA-Based Stereo Matching for Crop Height Measurement Using Monocular Camera [J]. Microprocess and Microsystems, 2024, 108: 105063. |
| [11] | SHAHBAZI M, SOHN G, THEO J. High-density Stereo Image Matching Using Intrinsic Curves [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2018, 146: 373-388. |
| [12] | 张泽琳, 曹星, 王蕾, 等. 基于改进SGM的废旧机械零件彩色三维重建方法 [J]. 激光与光电子学进展, 2024, 61(12): 114-124. |
| ZHANG Zelin, CAO Xing, WANG Lei, et al. Color 3D Reconstruction Method of Used Machinery Parts Based on Improved SGM [J]. Laser & Optoelectronics Progress, 2024, 61(12): 114-124. | |
| [13] | WANG Yina, GU Mengjiao, ZHU Yufeng, et al. Improvement of AD-Census Algorithm Based on Stereo Vision [J]. Sensors, 2022, 22(18): 6933. |
| [14] | GUO Junguang, GU Feifei, YE Yuping, et al. An Accurate Speckle 3D Reconstruction System Based on Binocular Endoscope[C]∥2021 IEEE International Conference on Real-time Computing and Robotics (RCAR). Xining, 2021: 703-708. |
| [15] | HAMID M S, MANAP N A, HAMZAH R A, et al. Stereo Matching Algorithm Based on Deep Learning: a Survey [J]. Journal of King Saud University: Computer and Information Sciences, 2022, 5(34): 1663-1673. |
| [16] | YU Hao, ZHOU Changjiang, ZHANG Wei . et al. A Three-dimensional Measurement Method for Binocular Endoscopes Based on Deep Learning[J]. Frontiers of Information Technology & Electronic Engineering, 2022, 23(4):653-660. |
| [17] | TAHMASEBI M, HUQ S, MEEHAN K, et al. DCVSMNet: Double Cost Volume Stereo Matching Network [J]. Neurocomputing, 2024,618: 129002. |
| [18] | YAN Long, ZHAO Xingfang, DU Huiqiu. Research on 3D Measuring Based Binocular Vision[C]∥2014 IEEE International Conference on Control Science and Systems Engineering. Yantai, 2014: 18-22. |
| [19] | HUANG Wei, MIAO Huisi, JIAO Shuming, et al. A Planar Constraint Optimization Method to Improve Camera Calibration for Imperfect Planar Targets[J]. Optics and Lasers in Engineering, 2024,180: 108273 . |
| [20] | ZHANG Xiaowen, Tiegang LYU, DAN Wang, et al.High-precision Binocular Camera Calibration Method Based on a 3D Calibration Object[J]. Applied Optics, 2024, 63(10): 2667-2682. |
| [21] | ZHANG Zhengyou. Flexible Camera Calibration by Viewing a Plane from Unknown Orientations[C] ∥Proceedings of the Seventh IEEE International Conference on Computer Vision. Kerkyra, 1999: 666-673. |
| [22] | HIRSCHMULLER H. Stereo Processing by Semiglobal Matching and Mutual Information[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2008, 30(2): 328-341. |
| [23] | MOSTEGEL C, RUMPLER M, FRAUN-DORFER F, et al. Using Self-contradiction to Learn Confidence Measures in Stereo Vision[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Las Vegas, 2016: 4067-4076. |
| [24] | MIANGOLEH S M H, DILLE S, MAI L, et al. Boosting Monocular Depth Estimation Models to High-resolution via Content-adaptive Multi-resolution Merging[C]∥ Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Nashville, 2021: 9680-9689. |
| [1] | 任加琪, 许四祥, 董宾卉, 汤澳, 宋昱宸. 基于轻量化高分辨率网络的双目视觉定位与测量[J]. 中国机械工程, 2026, 37(1): 201-208. |
| [2] | 梅杰, 覃嘉锐, 陈定方, 陈昆, . 基于视觉同时定位与地图构建的水下图像增强式视觉三维重建方法[J]. 中国机械工程, 2024, 35(02): 268-279. |
| [3] | 宇文旋1;赵明明2;陈龙2 . 无人车鱼眼双目深度提取研究[J]. 中国机械工程, 2019, 30(13): 1577-1584. |
| [4] | 张洪鑫;王明珠;仇浩然;姜金刚. 基于单目图像序列的铸件三维重建方法[J]. 中国机械工程, 2018, 29(23): 2799-2803,2814. |
| [5] | 同志学;赵涛;贺利乐;王消为. 基于双目视觉的工程车辆定位与行驶速度检测[J]. 中国机械工程, 2018, 29(04): 423-428. |
| [6] | 张浩, 孙见君, 马晨波, 涂桥安. 机械密封端面形貌的三维重建及其表征[J]. 中国机械工程, 2017, 28(11): 1287-1291,1299. |
| [7] | 杨志光, 张永林, 谢经明, 陈幼平. 基于双目视觉和约束条件的行人目标定位[J]. 中国机械工程, 2016, 27(23): 3171-3175. |
| [8] | 王玉亮, 刘飞, 沈建新, 刘贤喜. 基于单目视觉的视网膜三维重建技术研究[J]. 中国机械工程, 2016, 27(18): 2477-2481. |
| [9] | 柯丰恺, 陈幼平, 谢经明, 张代林. 基于凸松弛优化算法的相机内外参数标定[J]. 中国机械工程, 2016, 27(05): 634-639,657. |
| [10] | 周兴林, 李程, 刘汉丽, 蒋难得, 张云, 胡怡玮. 基于双目视觉的车辆行驶跑偏在线自动检测系统[J]. 中国机械工程, 2015, 26(1): 130-134. |
| [11] | 崔晓川, 邾继贵, 隆昌宇. 基于全局控制网的三维形貌测量方法[J]. 中国机械工程, 2013, 24(22): 3009-3013. |
| [12] | 熊维;李文龙;尹周平. 双目PMP视觉测量中立体匹配方法的设计与实现[J]. 中国机械工程, 2013, 24(19): 2635-2640,2646. |
| [13] | 王殿君. 双目视觉在移动机器人定位中的应用[J]. 中国机械工程, 2013, 24(09): 1155-1158. |
| [14] | 吴丹妮, 伍铁军. 基于机器视觉的虚拟雕刻轨迹跟踪系统研究 [J]. 中国机械工程, 2010, 21(23): 2821-2825. |
| [15] | 张辉;张丽艳;韦虎;. 双目立体测量系统标定的三步法[J]. J4, 2009, 20(16): 0-2015. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||